- Document History
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
Contact Information
University: Delhi Technological University
Team Members (with year of graduation): Vishnu Srivastava
Faculty Advisers: Dr.Rishu Chaujar
Email Address: nil
Submission Language : English
Project Information
Title: Internet Operated Explosive Ordnance Disposal Vehicle using LabVIEW
Description:
The project aim at controlling a robotic bomb disposal vehicle over the internet such that a explosive ordnance disposal expert irrespective of his\her location can operate the vehicle and get live video feeds. The targeted market will be military (for border defense),local police stations, private security sectors providing security facilities to hotels and large organizations and companies.
The following are the benefits of using such system:
1. No need of highly trained\skilled bomb diffusing personnel at every location
2. Remote operation
3. Real-time video feeds
4. Faster response to situation
5. Saves many lives
Project Vision:
Terrorism in any form is one of the main issue that today’s world faces and the major method of spreading it is through bombing a target areas or people. Such type of situations require extremely fast response in order to save from damage the life of people and property.It requires a need of highly trained\skilled bomb diffusing personnel at every location.
Thus the project aims at a solution to above problems in a sustainable and cost effective way.By implementing the remote operation of a bomb diffuser vehicle such that any operator located at any part of the world can operate the vehicle. Currently such a system are utilized using a short range RF band but implementing it using internet will lead to long distance operation. As the onset of optical fiber communication fast data extremely fast data rates are achievable with very less lag and data loss.
Products
Software Tools being used:
1. NI LABVIEW
2. NI VISION ACQUISITION TOOLKIT
3. NI VISION DEVELOPMENT TOOLKIT
4. FAKE WEBCAM APPLICATION FOR WINDOWS
5. SKYPE (ANDROID & WINDOWS)
6. ARDUINO IDE
Hardware tools being used:
1. ARDUINO BOARD
2. DTMF DECODER
3. ANDROID SMARTPHONE
4. ROBOTICS MATERIAL(6 SERVO MOTORS, 4 DC MOTORS, etc.)
The Challenge
1. Time lag in operation may be induced due to low data transfer rate.
2. Large data loss in signals may occur is we use long distance communication.
The Solution
Implementation:
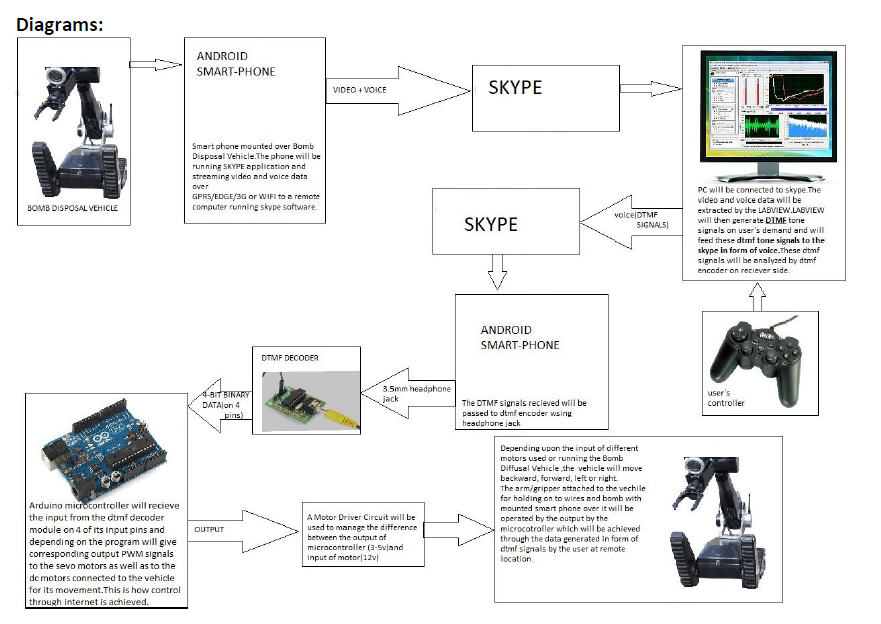
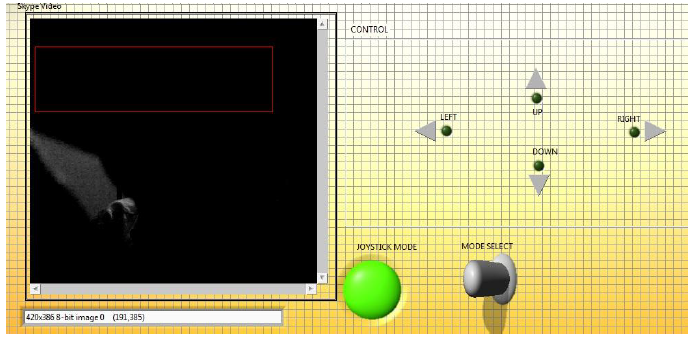
The vehicle will consist of 2 servo operated robotic arm mounted over a platfor which will be moved using 4 dc motors. The vehicle will fit in a 1m cube. A smartphone will be mounted over the vehicle. The phone will be running the skype application on 3g network which will be connected to pc running skype software. The voice and video data from the remote location will be streamed in this way. LABVIEW running on pc will generate DTMF signal on users directions to move the appropriate part on the vehicle. The dtmf signals will be sent through skype. When the phone will receive the signals, they will be converted to corresponding digital value using the dtmf decoder. These signals will then be transferred to the microcontroller which will move the desired part of the vehicle.
Alternative to Arduino microcontroller:
NI Single-Board RIO-based controller can be used if available.
Estimated Timeframes:
As a part of my minor project I have already started working on the vehicle and its hardware aspects. I am currently working on the algorithm part as we have limited signals (16 dtmf signals) and more operations, thus a multiplexing approach is being adopted.I plan to complete the project within the next two weeks of submission.
Others:
Video link(s): http://www.youtube.com/watch?v=X0Zpfb5ujeo&feature=youtu.be
{kind=link}
{kind=link}
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Awesome
