- Document History
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
WPI's UGV - Prometheus
Contact Information:
University: Worcester Polytechnic Institute
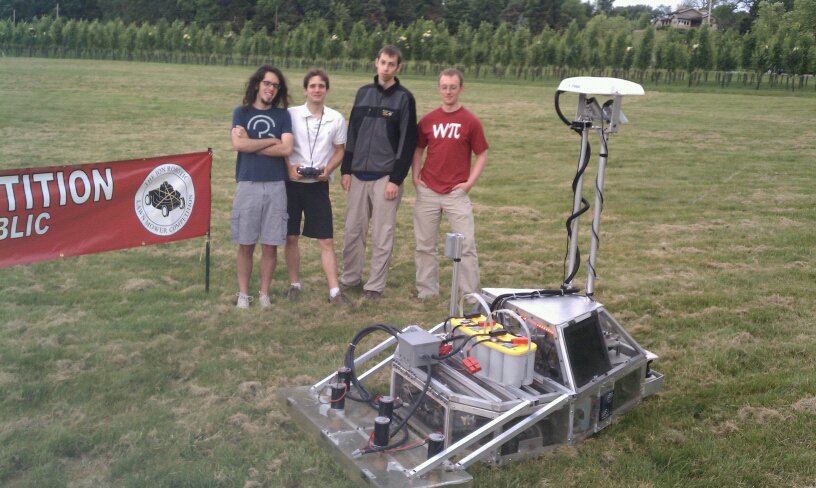
Team Member(s): Mehmet Ali Makmanalp, Ryan Doherty, Jeffrey Gorges, Peter Kalauskas, Ellen Peterson and Felipe Polido
Faculty Advisors: Dr. Taskin Padir, Dr. Stephen Nestinger
Email Address: robot@wpi.edu
Project Information:
Title:
Realization of Performance Advancements for WPI's UGV-Prometheus
http://www.facebook.com/pages/WPI-IGVC-Team/201378266573034
http://www.wpi.edu/academics/Majors/RBE/
Description:
The objective of this project is to design and implement performance improvements for WPI's intelligent
ground vehicle, Prometheus, leading to a more competitive entry at the Intelligent Ground Vehicle Competi-
tion. Performance enhancements implemented by the project team includes a new upper chassis design with
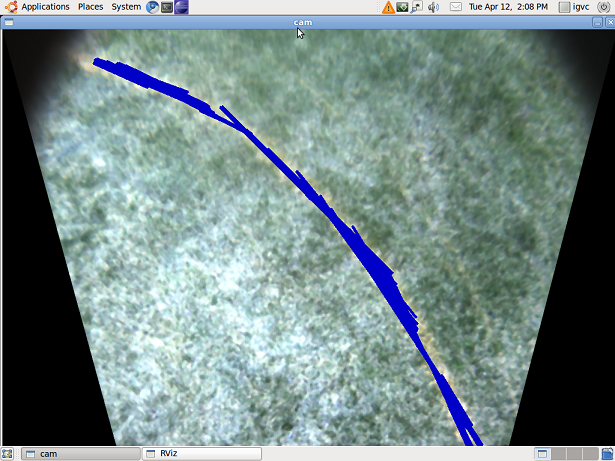
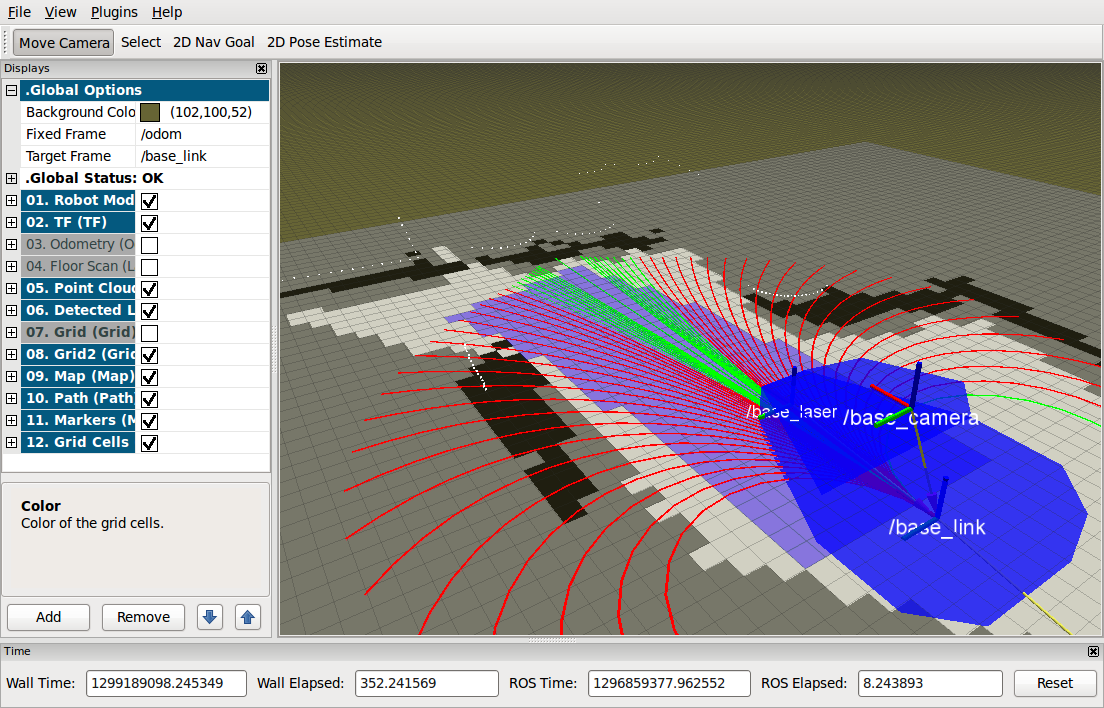
a modular payload area, a recon gurable camera mount, extended Kalman filter-based localization with a
GPS receiver and a compass module, a lane detection algorithm, and a modular software framework. As a
result, Prometheus has improved autonomy, accessibility, robustness, reliability, and usability.
Products:
NI LabVIEW
NI cRIO + modules
The Challenge:
Prometheus is a contender in the Intelligent Ground Vehicle Competition, which is a national
competition sponsored by the U.S. Department of Defense, the Association for Unmanned Vehicle
Systems International (AUVSI), the U.S. Army Tank-Automotive Research, Development and Engineering Center
(TARDEC) and Oakland University.
The competition requires project teams to design a small outdoor vehicle that will autonomously travel from a
starting point to a number of target destinations using GPS waypoints, while avoiding obstacles.
The entries are judged based on a number of criteria including design innovation, a written report, an oral
presentation, and overall performance during the competition.
Prometheus is also a first year entry on the dynamic challenge for the ION Autonomous Lawnmower Competition:
http://www.ion.org/satdiv/alc/
The Solution:
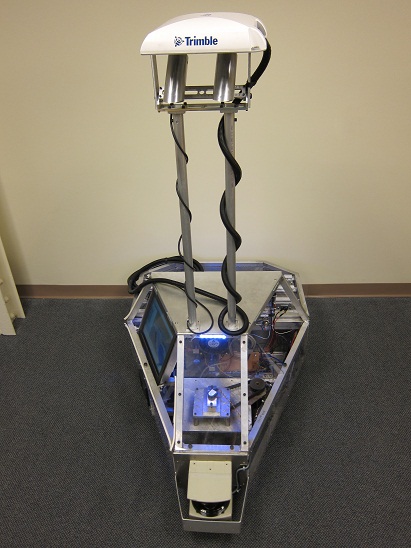
Prometheus has a custom aluminum chassis with a reconfigurable payload area. Its differential drive system with
a steered front wheel allows for high maneuverability and zero-point turning radius. Additionally, the vehicle's power
comes from two interchangeable 12V 55Ah sealed lead acid batteries connected in series.
In order to accomplish the challenges presented by the IGVC, Prometheus has an array of sensors on board. These
include a PNI Fieldforce TCM inertial measurement unit, a Trimble AG DGPS receiver with OmniStar HP subscription,
2x Point Grey Flea2 Firewire cameras, a SICK LMS-291 LIDAR range nder, and US Digital optical encoders. For the
vast amount of data processing and low level interfacing Prometheus relies on a National Instruments cRIO unit and a
custom built on board computer (Intel Core i7 Quad, 6GB DDR3 RAM). Moreover, the development team is able to
interface with Prometheus through the included router's Wi-Fi, the built-in touch screen, a 6 channel remote control,
and a centralized external interface panel.
For more detailed information, please read the attached report, Prometheus2011.pdf
The file prometheus2.zip contains the LabVIEW code generated for the project.




- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Hi WPIPrometheus,
Thank you so much for your project submission into the NI LabVIEW Student Design Competition. It's great to see your enthusiasm for NI LabVIEW! Make sure you share your project URL with your peers and faculty so you can collect votes for your project and win. Collecting the most "likes" gives you the opportunity to win cash prizes for your project submission. If you or your friends have any questions about how to go about "voting" for your project, tell them to read this brief document (https://forums.ni.com/t5/Student-Projects/How-to-Vote-for-LabVIEW-Student-Design-Projects-doc/ta-p/3...).
I'm curious to know, what's your favorite part about using LabVIEW and how did you hear about the competition? Nice work with the NI myDAQ!
Good Luck, Jessica in Austin, TX.
