- Document History
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
Contact Information
University: University of Utah
Team Member(s): B.J.Minson, Chris Brammer
Faculty Advisors: Dr. Don Bloswick
Email Address: cdbrammer@gmail.com
Project Information
Title: Ultra ARM (Assisted Robotic Movement)
Description:
The UltraARM is a robotic device intended to reduce the musculoskeletal stresses encountered by sonographers and ultrasound technicians. It supports the user's arm while allowing a large range of free motion, moving with the user to make the arm feel weightless.
Products:
National Instruments DAQCard6024E
LabVIEW 2009 Student Edition
The Challenge:
Ultrasound Technicians areprone to getting musculoskeletal disorders (MSDs) and repetitive stress injuries due to the nature of their jobs. A typical work day requires them to perform 10 to 15 scans, each of which generally takes 15 to 30 minutes. These scans require them to hold their armsout away from their bodies and apply pressure at various angles. Over time these tasks begin to damage their shoulders, upper backs and necks as well as their fingers, wrists and hands. The problem is widespread and over 90% of sonographers work in pain each day. Furthermore, 24% have had to end their careers early because they couldno longer perform their jobs.
After evaluating thechallenge to reduce MSDs in sonographers, and many possible solution options, the team decided to build a robot that could gravity compensate the scanning arm and follow it around while staying out of the way. This approach may significantly reduce the stresses on the shoulder, back and neck. It would also allow technicians to continue performing their scans with little interference, without significantly changing the methods they are familiar with. Team UltraARM has had to create a system that reduces postural stresses and allow sonographers to perform their tasks with minimum stress ontheir muscles. The UltraARM was designed to make the arm and device feel weightless to the sonographer.
The Solution:
The UltraARM is required to allow motion within a large working envelope, and must provide an assistive force in any direction. In order to achieve these requirements while addressing the most important needs listed above, the design for the final product included electric motors as actuators, control programming with a data acquisition (DAQ) card and LabVIEW, sensors measuring force and position, and a free-moving ergonomic arm support.

Figure 1: Feedback loop of automated system
The potentiometers are placed at each joint to determine joint angle, and the force sensors are used to determine the user's desired direction of motion. The data is then sent to the computer via the DAQ card. It is processed and analyzed with the custom LabVIEW program, which sends signals to the motor drivers via the DAQ card. This provides a continuously updating control loop as shown in figure 1. A few of these components are shown in figure 2.
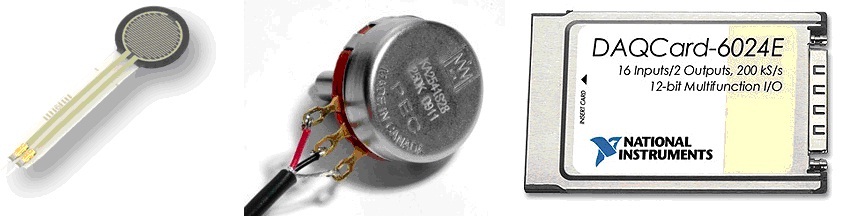
Figure 2: Force sensor, potentiometer, and National Instruments DAQCard 6024E
The UltraARM design is shownin figure 3, while figure 4 shows the exploded view of motors and machinedparts. Figure 5 shows a photo of theactual UltraARM.
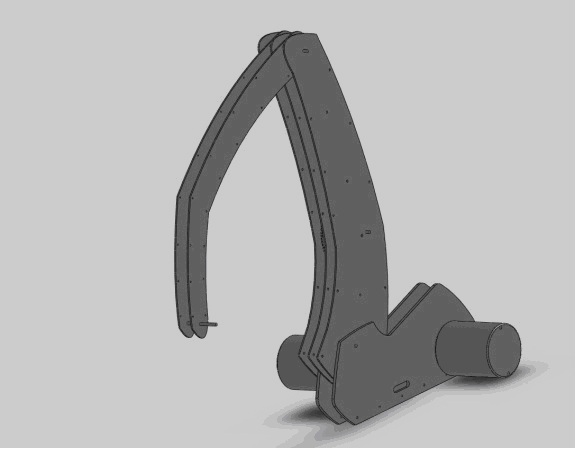
Figure 3: Solid Works Drawing of UltraARM
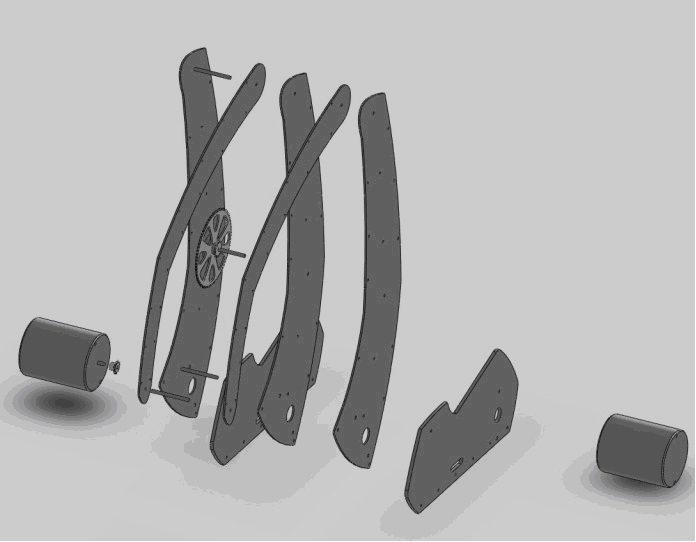
Figure 4: Exploded View of machined parts and motors
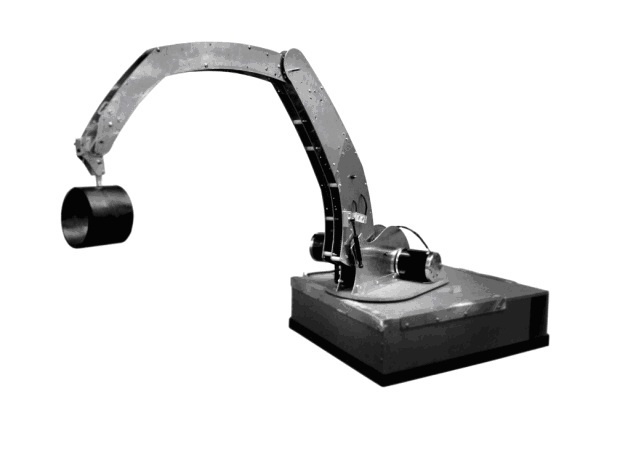
Figure 5: Photo of UltraARM
Potentiometers placed at both joints allow the UltraARM to continually sense its position. The equations for forward kinimatics shown in figure 6 produces the x and y coordinates of the end effector in the plane of the robotic arm. Conversely, the device can reach to a specific position in space. The desired x and y coordinates can be used to calculate the necessary angles of the joints based on the equations shown in figure 7.
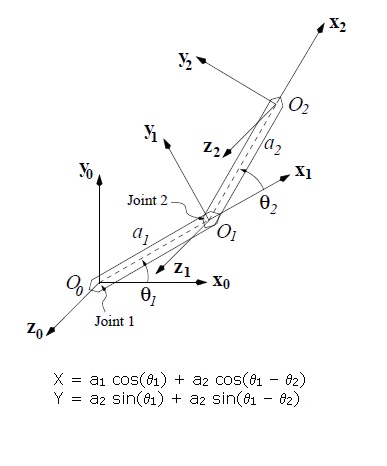
Figure 6: Forward kinematics
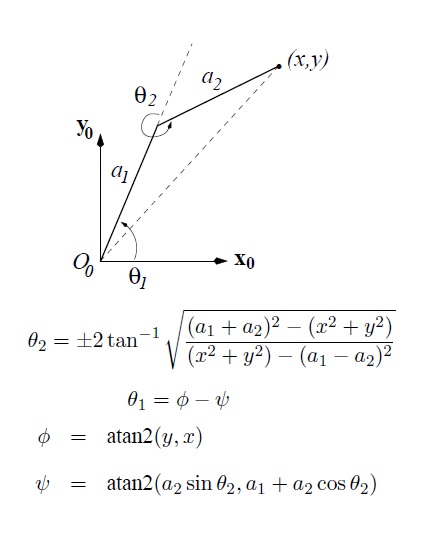
Figure 7: Inverse kinematics
End Effector
The end effector, shown in figure 8, which can be thought of as the “wrist” of the robotic arm, is maintained vertical via acable system connected to the base. Thisallows the force sensing resistors inside the end effector to maintain acoordinate system consistant with the base. Three force sensors within the end effector are positioned to measureany translational force in the x, y, and z directions that the user applys tothe arm support. With this sensoryinput, the UltraARM can adjust the motors to move in the direction of theimposed force. The horizontal inputforces are programmed to be cancelled out by the motors, and this is the samein the vertical direction except that the weight of the user’s arm is includedas an offset. The end effector thenmoves freely with the desired motion of the user, while providing arm support.

Figure 8: End Effector
LabVIEW and National Instruments tools
The UltraARM software was programmed using LabVIEW 2009 Student Edition. This allowed many benefits to the project including simple and user-friendly programming, and especially, extremely fast implementation. Previous prototypes were built using microcontrollers to control the system, and many months were spent programming, testing, and perfecting the system. When it was decided to use LabVIEW as the programming environment, the UltraARM became functional within three short weeks. Since we were able to rely on the NI DAQCard and LabVIEW for quick andeasy implementation, the majority of our working time could be spent on the mechanical and electrical systems, providing a more robust design.
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Hello there,
Thank you so much for your project submission into the NI LabVIEW Student Design Competition. It's great to see your enthusiasm for NI LabVIEW! Make sure you share your project URL with your peers and faculty so you can collect votes for your project and win. Collecting the most "likes" gives you the opportunity to win cash prizes for your project submission. If you or your friends have any questions about how to go about "voting" for your project, tell them to read this brief document (https://forums.ni.com/t5/Student-Projects/How-to-Vote-for-LabVIEW-Student-Design-Projects-doc/ta-p/3...). You have until July 15, 2011 to collect votes!
I'm curious to know, what's your favorite part about using LabVIEW and how did you hear about the competition? Great work!!
Good Luck, Liz in Austin
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Hi Liz,
I think our favorite part about using LabVIEW was how easy it was to implement the controls that we needed. It saved us loads of time and its visual GUI is very intuitive. The more time we spend on LabVIEW, the more we are amazed at the engineering possibilities.
Thanks,
Chris
