- Document History
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
Contact Information
University and Department: University of California San Diego, Department of Mechanical and Aerospace Engineering
Team Members: Nicholas Morozovsky, Christopher Schmidt-Wetekam, Matt Bockman, Ishmael Rahimian, Travis Rowell, Ronald Truong, Yoshio Tsuruta
Faculty Advisors: Prof. Thomas Bewley
Primary Email Address: nmorozov@ucsd.edu
Primary Telephone Number (include area and country code): (858) 534-6146
Web Site: http://robotics.ucsd.edu/
Project Information
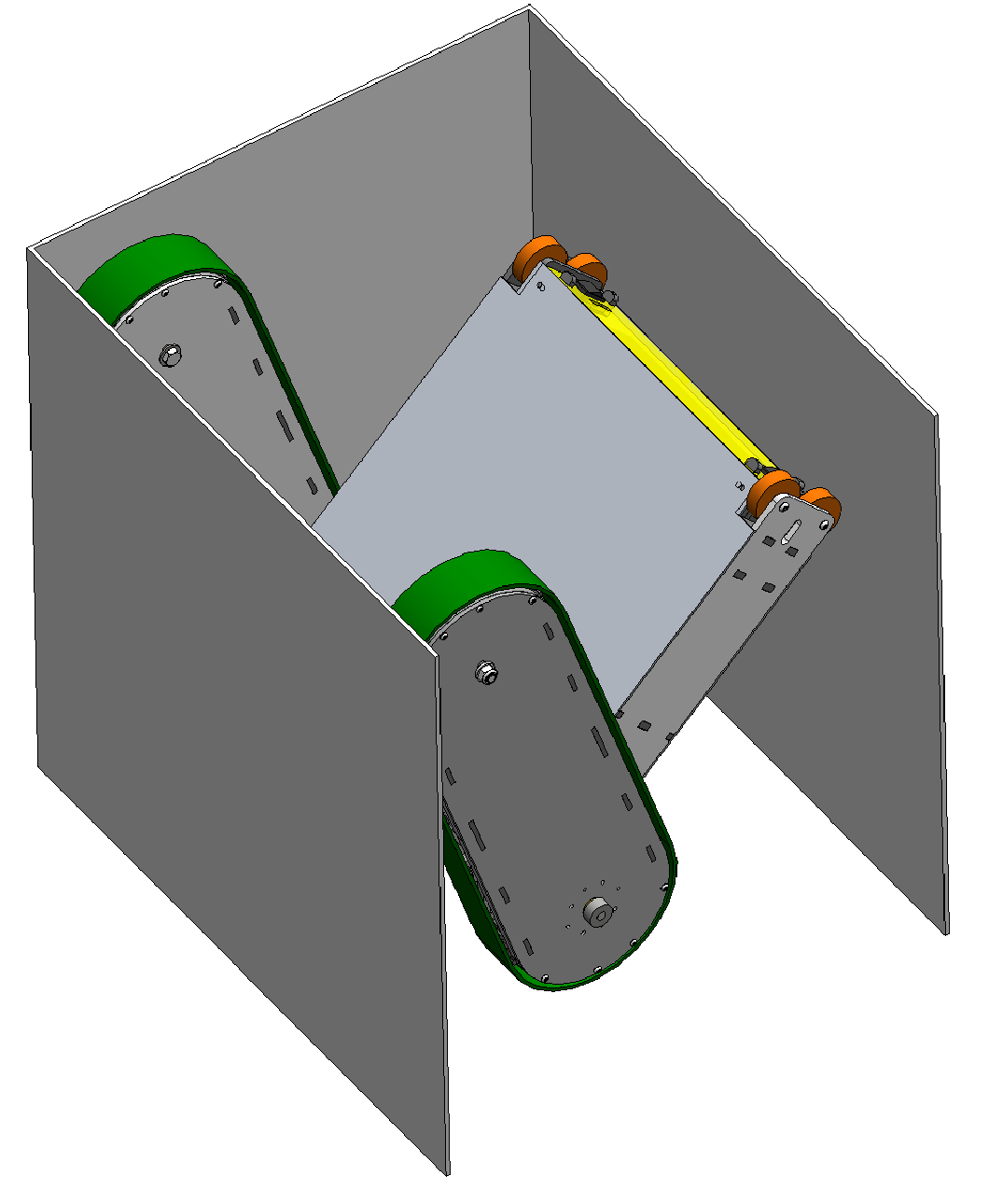
Project Title: Switchblade
List all parts (hardware, software, etc.) you used to design and complete your project:
Hardware:
- NI Single-board RIO 9602
- NI 32 channel Analog to Digital Converter 9205
- NI Stacking Kit 9691
- Asus WL-330gE WiFi Bridge
- Sensors: Optical Encoders, MEMS Accelerometer and Gyroscope
- 6-Cell Lithium Polymer Battery
- 4 DC Motors with Planetary Gear Boxes
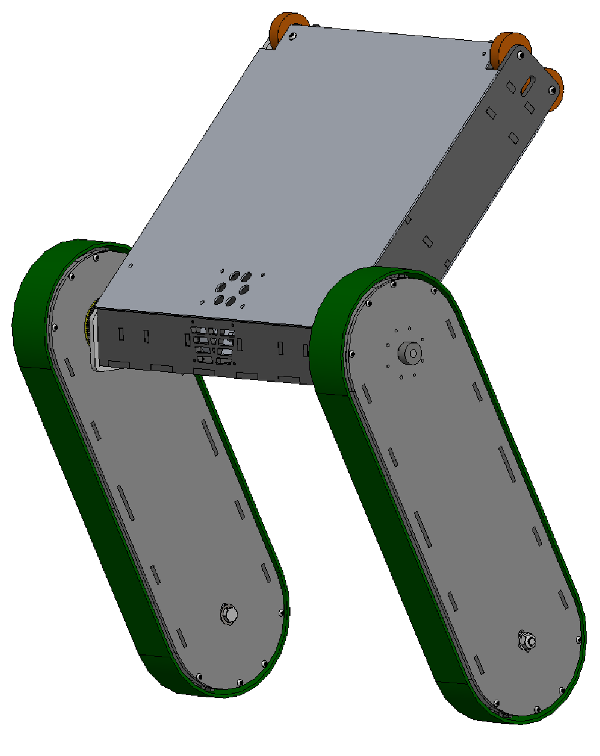
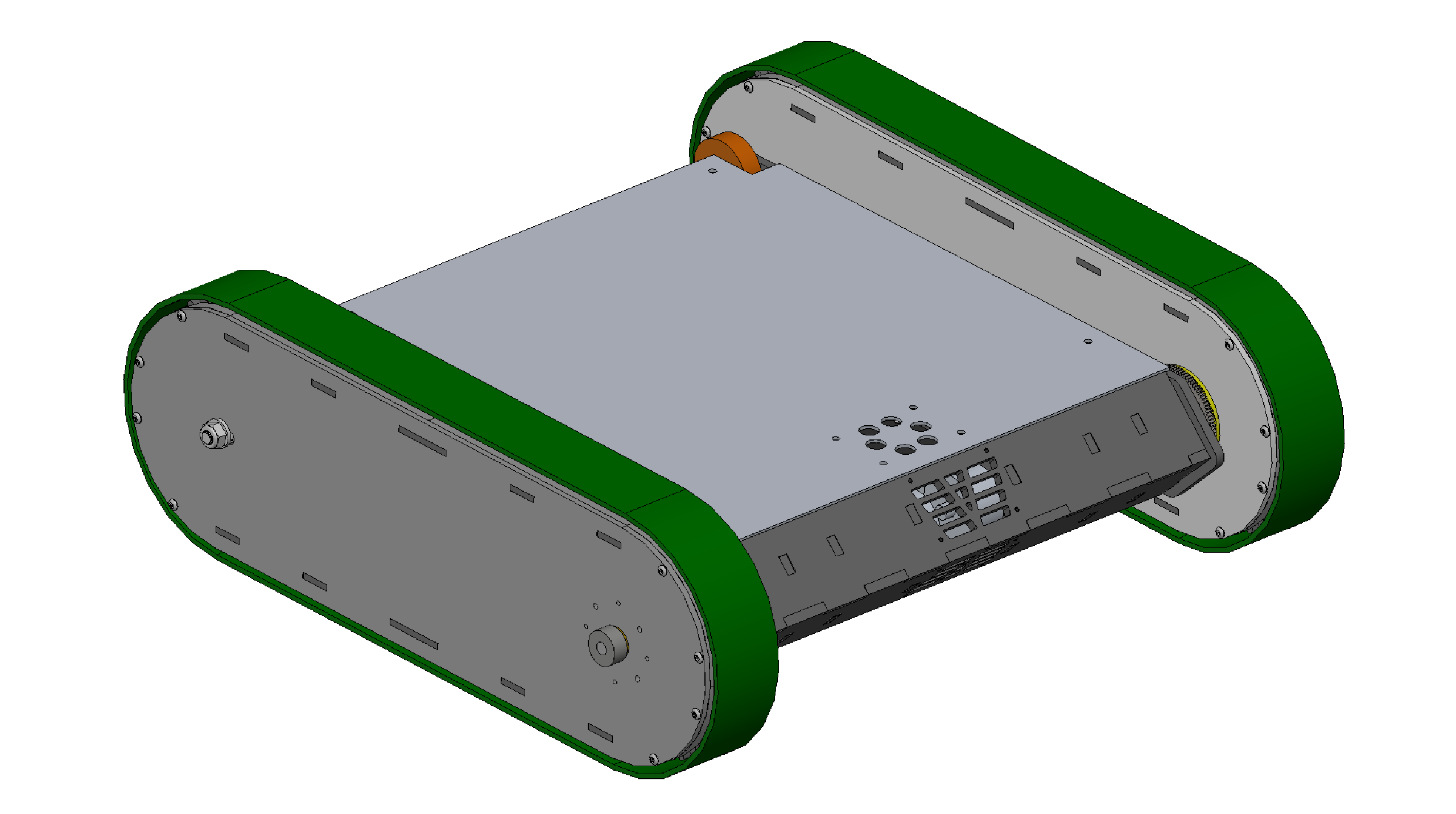
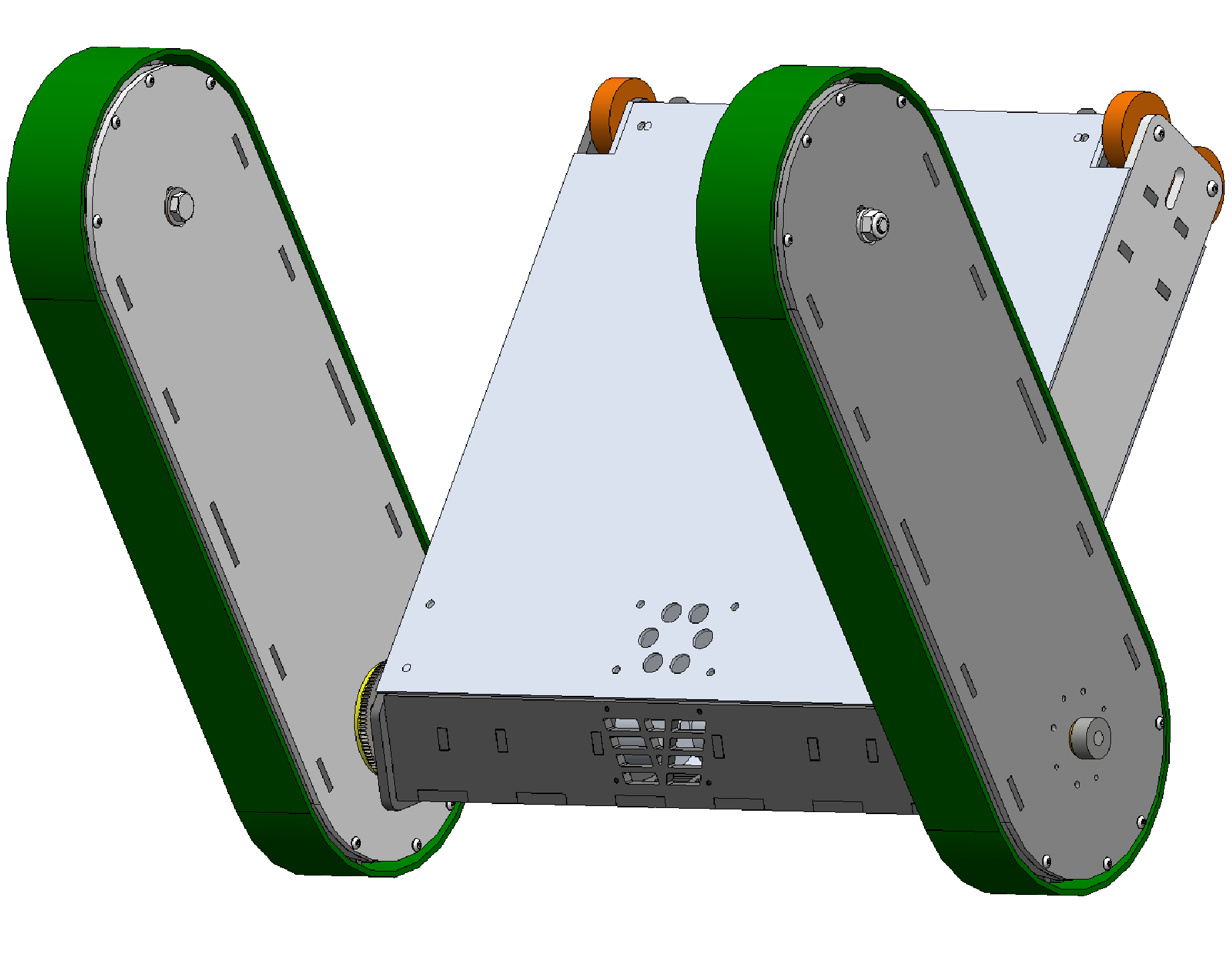
- Custom chassis and tread assemblies made from laser-cut acetal
Software:
- LabVIEW 2009: Programming
- SolidWorks 2009: Computer-Aided Drawing, Finite Element Analysis
Describe the challenge your project is trying to solve.
Current state-of-the-art unmanned ground vehicles (UGVs) can only overcome large obstacles by being much larger than the obstacle. This inherently makes the UGVs heavier, more expensive, and less able to navigate in confined spaces.
Describe how you addressed the challenge through your project.
Switchblade utilizes control feedback algorithms to stabilize a range of dynamic maneuvers which allow it to overcome obstacles much larger than its nominal height. Switchblade's small form factor results in better maneuverability in tight spaces, significantly lower cost, and the ability to be easily transported by one person.
Applications:
Search and Rescue, Ordnance/Improvised Explosive Device Disposal, Mine Exploration, Border Patrol
C-Mode Balancing |
Horizontal Skid Steer |
V-Mode Balancing |
Perching |
Chasm Crossing |
Duct Climbing |


- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Thank-you for your submission to the competition. Which mode/manuver did you find the most challenging to implement with Switchblade?
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
We're still implementing some of the modes of locomotion. In our lab, we have a lot of experience with modeling systems as mobile inverted pendulums and implementing balancing controllers. C-mode balancing was not simple, but we were able to draw from our past experience. We're currently implementing V-mode balancing and trying to make the LabVIEW code more modular. The most difficult will be perching, mainly because of the difficulty involved in estimating the contact point along the treads. Duct climbing naturally requires a very high motor torque to weight ratio, as well as excellent traction and may not be possible with the current prototype.
