- Document History
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
Prototype Prosthetic Hand
Please complete the following information
Contact Information
University and Department:
Instituto Tecnológico y de estudios superiores de Monterrey Campus Guadalajara
Team Members:
Manuel Alejandro Trejo Letechipia
Luis Daniel Olea Mendívil
Faculty Advisors:
Dr. Bernardino Castillo Toledo
Primary Email Address:
Primary Telephone Number (include area and country code):
011 52 443 3269901
Project Information
Project Title:
Prosthetic Hand Prototype
List all parts (hardware, software, etc.) you used to design and complete your project:
The components of this system are:
- LabVIEW 2009
- Windows 7
- Freescale DEMOAC board
- Freescale DEMOQE board
- Miniature RF transmitter/receiver
- 6 servomotors in the hand.
- 2 digital servomotors in the wrist.
- Human interface is controlled by the foot
- 6 flexiforce sensor
- A hand built with rapid prototyping using acrilontril-butadien-estiren with an anatomic design and anthropometric measures from the author, summing up a total of 20 unique pieces designed with Solid Edge CAD software.
Describe the challenge your project is trying to solve.
Each day work accidents, car accidents and disease are factors which no one is free from suffering so you can lose a hand.
Today other high technology prosthetic arms can cost total up to $59,000 after surgeries, therapies, maintenance, etc. In other words technology is out of reach for the Mexican market, and this is the unattended market that the project seeks to fulfill.
That is why the team decides to develop a prosthetic hand that can be acquired by Mexican patients at a fair price that offers technological advantages over the existing ones in the market.
The technical problems that need to be solved in order for the implementation of a functional prosthetic hand are numerous given that it is a complex mechanism that has to be accurate and strong, and also have high aesthetics, and it has to provide an interface that allows the control of the mechanism as easily as moving your own hand. This project integrates all of the elements of mechatronics engineering which are, mechanics, electronics, electric circuits, and control.
Describe how you addressed the challenge through your project.
The system consists of a prosthetic hand with 6 degrees of freedom and a wrist with 2 degrees of freedom controlled by two completely innovative systems that has a foot pressure device that detects pressure and/ or voice commands. Another one of its characteristics is that the hand can be adapted to a person that only lost a hand, given that the mechanic hand that is described has everything it needs to work within itself.
Basically, the system can be simplified in two main components:
1. An anatomically designed hand with the anthropometric measures of the author. Has up to eight degrees of freedom.
2. A control system. Labview demonstrates the proof of concept of a robotic prosthetic hand which is controlled by two innovative non invasive methods: a wireless electronic insole and/or voice commands.
This pretends to give to the people that lost a hand a possibility of improving their life quality with an innovative, high technology system that has two main advantages: independent movement in each finger, and a wrist with two degrees of freedom.
Please upload photos below:
[Click on photo icon on task bar]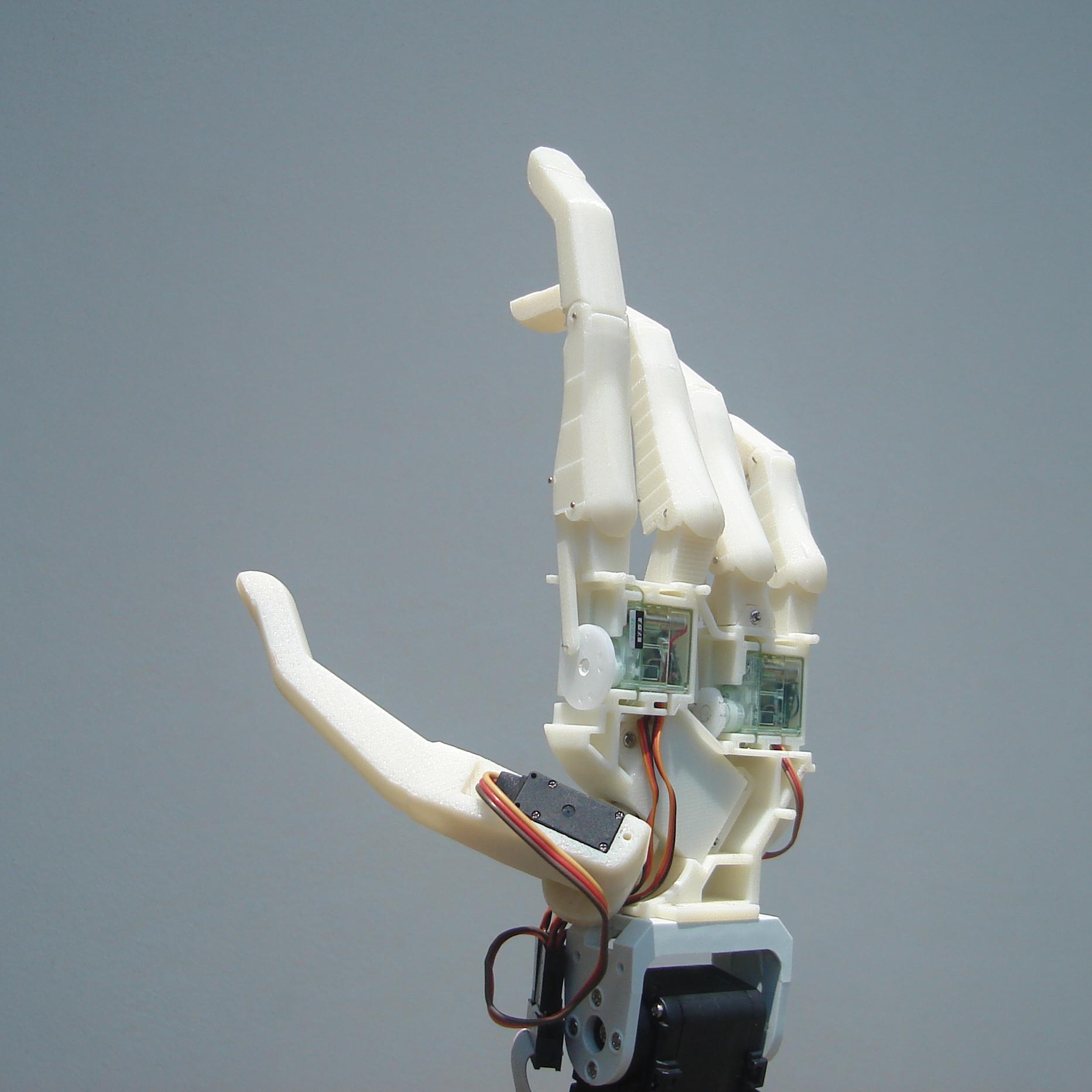


Please insert video below:
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Thank-you for your submission to the student design competition. How long did it take to develop this application? Do you have any screenshots of the LabVIEW program?
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
This application was developed over an entire semester, it took mechanic design, electronics, Labview SW and embedded software. all of the hand's mechanical parts were drawn on Solid Edge, this was possible due to my previous experience with prosthesis design.
Here is a snapshot of the main code. We used the NET framework and windows 7 to demonstrate the potential use of a voice controlled prosthethic hand. This program is similar to the one we wrote for detecting the fluid level in a container using only the sound it makes as its being filled, based on doppler effect.
This is the labview code:
