- Document History
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
Omnibot | A robot as an acrobat, Austria
Contact Information
University: HTL Jenbach

Team Member(s): Mr. Johannes Fankhauser, Mr. Michael Winkler
Faculty Advisors: Mr. Ing. B.Sc. Werner Zeindl-Nagele
Email Address: winkler.michael@live.at
Country: Austria
Project Information
Title: Omnibot | A robot as an acrobat
Description:
Our Tasks were to concept, model and produce a robot which is able to balance on a ball.
The robot should base on a three-dimensional invers pendelum.
The robot belongs to the family of the ballbots and for the basic concept we were inspired by the project of Dr. Masaaki Kumagai & Takaya Ochiai.
Products:
National Instruments LabVIEW 2010
sbRIO 9631 from National Instruments
The Challenge:
This project proposes the creation, implementation and control scheme of a robot balanced on a ball. Unlike a two-wheeled inverted pendulum, such as the Segway Human Transporter, an inverted pendulum using a ball moves in any direction without changing orientation, enabling isotropic movement and stabilization. The robot on the ball can be used in place of the two-wheeled robots. Our robot is equipped with three omnidirectional wheels mounted on stepping motors that drive the ball and a 6D-gyroscope to measure inclination, angular velocity and acceleration in both directions. It can keep station, traverse in any direction, and turn around its vertical axis. Inverted pendulum control is applied to two axes to maintain attitude. The robot was realized using an inverted pendulum control in two directions (back and forth and right and left) and an omnidirectional ball drive as mentioned above. The control is calculated in MATLAB and Software is done in LabVIEW.
Regarding the control system: The Robot was first described with a mathematical model, calculated in MATLAB and then the resulting gains were fine tuned. The robot was realised using an inverted pendulum control in two directions. Robot attitude and position are controlled separately in two orthogonal directions, simplified and modelled two-dimensionally as the wheeled inverted pendulum.
The Solution:
The developed robot is an acrobat and an entertainer. The ball on which he moves is eye-catching too. The touching surface on the floor is actually one single point, which makes him unstable. On the other hand this property makes it possible to move in any direction and to rotate around the z-axis. In the future the robot could be used as a touristic guide, an everyday assistance or as a toy and also for technical schools to visualize the possibilities of automation technology.
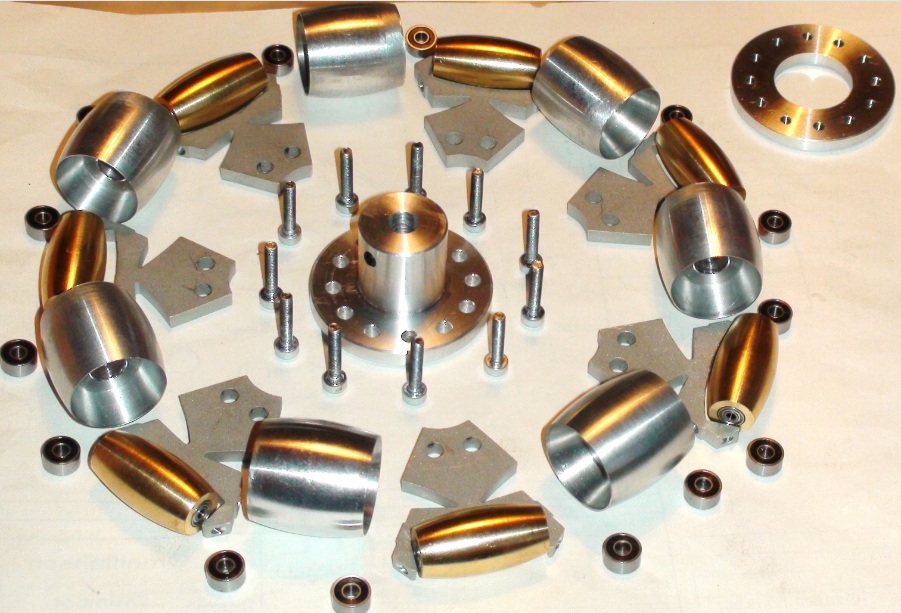

Focuses of the project are our outstanding technical solutions. Especially the three Omniwheels were a complex challenge. The whole robot were constructed and manufactured by ourselfs. Only the outer contour of the roller-frames were produced by an extern company, because we did not have the possibilities to produce it in our shool's workshops.
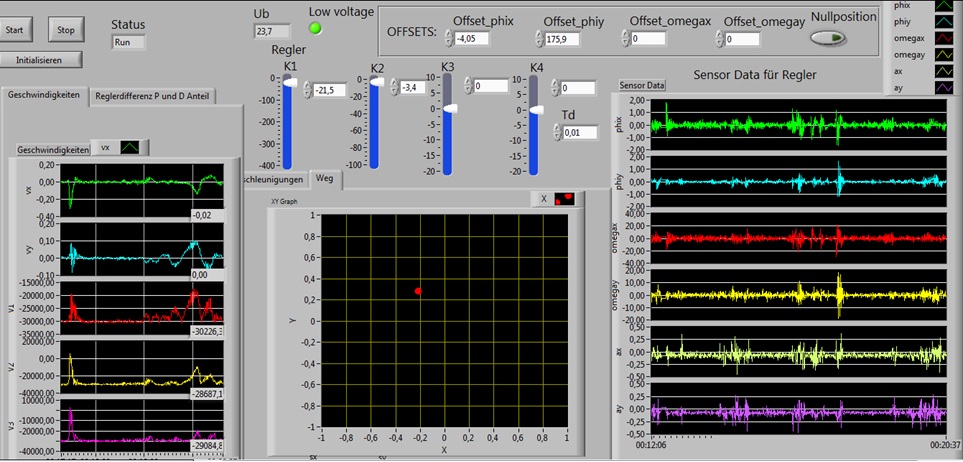
To use LabVIEW for the implementation was very comfortable- especially the fast creation of user-friendly frontpanels. The frontpanel was used as a measurement- and analysis- tool. We prefered to use the strip charts so we can analys the diagramms after an error occured to find the error source more easily.
On the left side we have a diagram for the resulting velocities vx and vy. V1, V2, V3 show the analog values given to the stepping motors. On the diagram in the middle you can see a red point. This point shows the current position of the robot in the room. The last diagram at the right side shows the current sensor data. The first two graphs show the angle, the next two show the angular velocity and the last two show the angular acceleration. By clicking on the tab controls we are also able to show the resulting acceleration and the control deviation.
Videos:
Demonstration at Be the Best 2012
The robot can be controlled by using a gamepad as you can see in the video.
Demonstration at Be the Best 2012-aftershow
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Hey!
I hope you enjoy our project: Omnibot | A robot as an acrobat.
I am available to answer questions, if you want to know more about it.
Greetings
Michael
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Wow! Great Robot. Well done guys.
Hope you`ll get enaugh likes and win the competition.
This is definitely one of the best projects I've seen.
Wish you good luck and a lot of VOTES from NI community.
Cheers,
John
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
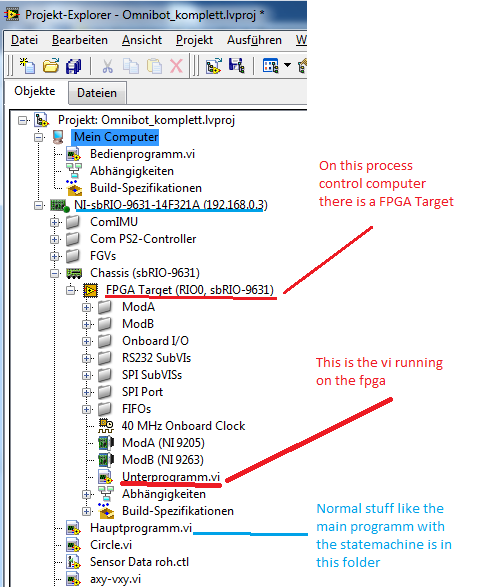
Hey gyurma!
On the process control computer sbRIO 9631 there is a subfolder called FPGA Target. If you create a VI inside this folder it will be automatically compiled (translated) for the FPGA. So you just have to programm it like a normal VI in LabVIEW.
To use combonents of the FPGA in our MAIN-Programm (in german: Hauptprogramm) we used FPGA references. With them you can read or write the status of the items in the frontpanel of the FPGA.
Have a look on the picture i have added. It is in german so i highlighted and translated the most important things for you.
Feel free to ask more if there are any questions left.
Greetings
Michael
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Great Job!
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Great idea, great work!
Please take some time to create some better quality videos (better light, perspective, resolution, descriptive text,...). Your work is definitely worth it!
Regards,
Jochen
