- Document History
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
Mobile Multidimensional Collaborative Monitoring System Based on Cognitive Radio Technique, China
Contact Information
University: Shanghai Jiao Tong University
Team Members (with year of graduation): Li'an Li(2015),Zhicheng Xu(2014), Feilong Lin(2015), Chao Kong(2015), Yong Cao(2015), Yu Yang(2015), Yue Gao(2015)
Faculty Advisers: Cailian Chen, Xinpin Guan
Email Address: li_li_an@sjtu.edu.cn
Submission Language: English
Project Information
Title: Mobile Multidimensional Collaborative Monitoring System Based on Cognitive Radio Technique
Description:
Wired monitoring is widely applied in our life such as industrial, security and traffic monitoring. However, the traditional wired monitoring system will cost a long time to deploy and can’t meet the instant demand of some emergency environment. We proposed the mobile multidimensional monitoring system through multi robot collaboratively acquire the video, map and audio information of the unknown environment, using cognitive wireless communication technique to make the data transmission quickly and reliably. We can have a panoramic view of the unknown emergency environment with the help of the multidimensional information, which can be very useful for the emergency decision or environment detection.
Products
NI Hardware Products- NI-PXIe-8133, NI-PXIe-5663E, NI-PXIe-5673E, FlexRIO-7965R, NI-USRP-2920
LabVIEW Products- Labview 2012, NI-RFSA, NI-RFSG, NI-P2P, NI-USRP, Labview FPGA, Modulation Toolkit, Spectrum Mesurements Toolkit, Vision Assistant, RF Communication(FPGA)
Additional Hardware- USB Camera, ARM SDB, Ultrasonic Sensors
The Challenge
Our system is confronted with several challenges.
Information Acquisition: the original video information is large and has a high demand of the communication throughput
Data communication:
1. The wireless communication link may be unreliable, not every packet can be received correctly.
2. The wireless communication may be interfered by other wireless radio, wireless link may be interrupted.
3. The wireless communication range is limited because of electromagnetic wave attenuation, the detect area of mobile terminal is limited.
Signal process: Multi mobile terminal need to communicate with PXI at the same time, the multipath signal parallel processing is another challenge.
The Solution
Mobile Multidimensional Collaborative Monitoring System mainly consists of three parts: mobile terminal, relay robot and the PXI controller as Figure 1. The mobile terminal can enter the unknown environment to acquire the multidimensional information and transmit the data through wireless. The mobile terminal can be controlled by the PXI or by itself according to its sensors results. The PXI controller can receive and process the mobile terminal information and display it. Because of the electromagnetic wave attenuation, the range of wireless communication is limited, so there is a relay robot to help the mobile terminal enlarge the detection coverage. What is more, the wireless interference in our system can be detected, the quality of communication can be guaranteed.
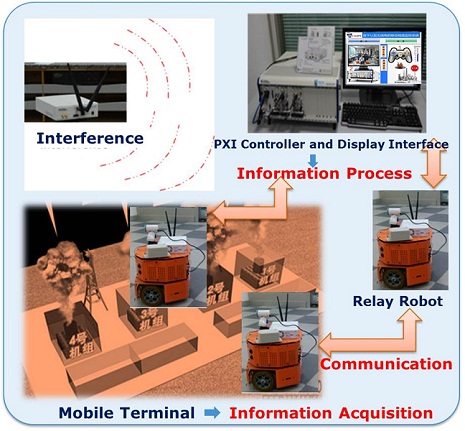
Figure 1 Architecture of Mobile Monitoring System
The hardware structure just as Figure 2, the mobile terminal is made up of a robot and a NI-USRP-2920(Universal Software Radio Peripheral), there is a computer on the robot which can operate the USRP through Gigabit Ethernet and control the movement of robot through UART. We assemble the robot, USRP and sensors just as Fig 3, the mobile terminal can acquire the information we are interested through sensors and communicate with PXI through the USRP. The PXI controller consists of four cards, which are NI-PXIe-5663E, NI-PXIe-5673E, NI-FlexRIO-7965R and NI-PXIe-8133. The 5663E and 5673E are used for signal receive and signal generate respectively, the FlexRIO-7965R is used for signal processing, the 8133 is used for the information recovery and robot control command produce.
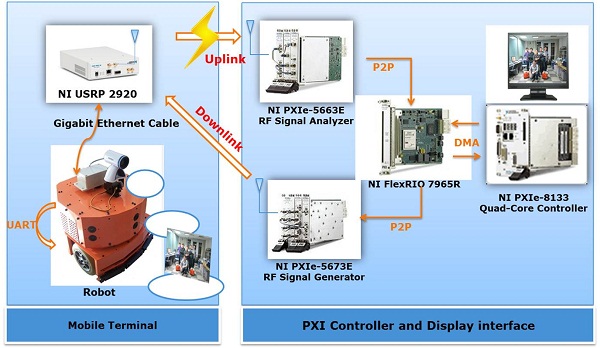
Figure 2 Hardware structure
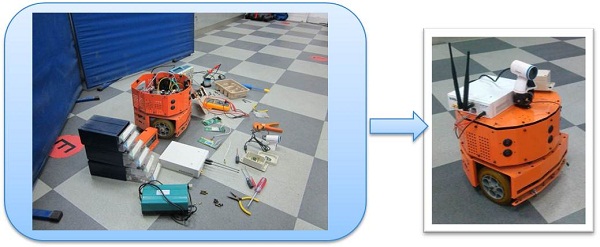
Figure 3 Mobile terminal
Except the NI hardware we adopt in our system, we also employ many driver and toolkit such as NI-RFSA, NI-RFSG, NI-P2P, NI-USRP, Labview FPGA, Modulation Toolkit, Spectrum Mesurements Toolkit, Vision Assistant, RF Communication(FPGA). The large benefit of using Labview was the rapid prototyping particularly with regards to data acquisition, manipulation and testing. Without the use of the Labview platform, the extent of the project would not have been possible. LabvIEW provides easy to use hardware driver and rich communication module, greatly reduce development time of our system.
Figure 4 is our system function block, at the mobile terminal, we realize the acquisition, compression and encoding, we can also control the robot manual or autonomic move. At the PXI side, the information can be recovered and display to the users, the user’s operate command can be sent to mobile terminal. There are two type channels between the mobile terminal and PXI, the uplink is data channel, and the downlink is control channel. This works takes full account of the wireless communication face link unreliable, channel interference, and wireless coverage limited challenges. We adopt custom frame check mechanism to ensure the communication quality and improve the communication efficiency, through spectrum sensing and spectrum switch technology to take advantage of limited spectrum resources and improve the anti-jamming capability, through power control and cooperative relay technology to expand the detection range of the mobile terminal.
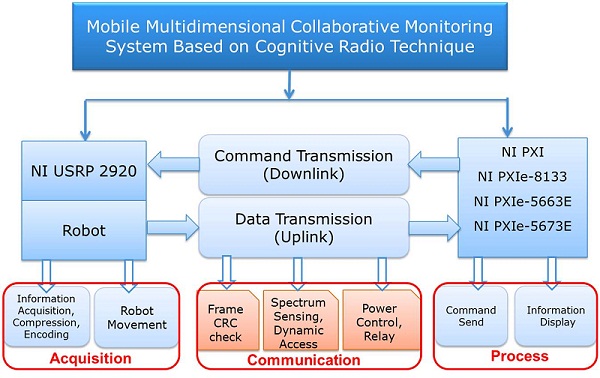
Figure 4 System function
Technique
Information acquisition:
Our system can obtain three different types information, the video information acquired by the USB camera, the map information obtained by the Laser radar sensor and the acoustic information of the environment. We encode the information and for the video information as figure 5, we adopt the DCT compression technique to reduce the throughput demand of data transmission.
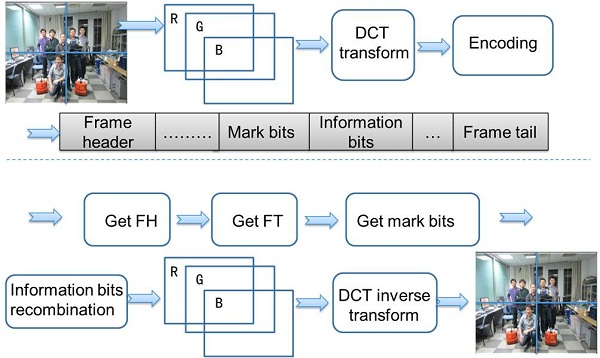
Figure 5 video information encoding
The video information was acquired through a USB camera, each image is divided into several blocks. For each block, we compress the information by discrete cosine transform (DCT), and then encode each block. For each image, add frame header and frame tail to mark the beginning and ending of an image. For the receiver, the process is inverse. Through the DCT compression technique, each image data size can be reduced 60%.
Data communication:
1. Frame CRC check mechanism
As we know, the wireless link is unreliable, not every packet can pass the CRC check. If we use the wrong packet to recover an image, the image is vague. So acknowledgement (ACK) and retransmission is necessary to guarantee the quality of the video transmission. However, ACK reduce the efficiency of data communication in the half duplex wireless networks because of: (i)ACK transmission time, (ii) ACK processing time and (iii)the switch delay between sending and receiving states. To improve communication efficiency in a lossy environment, we propose a new frame acknowledgement(F-ACK) for a frame transmission, which includes many packets. Instead of ACK for each packet transmission(P-ACK) (figure 6), the receiver sends the ACK after process the entire frame to notify the transmitter which packet is lost, and then the transmitter will send the lost packets in the front of a new frame. By using the F-ACK mechanism (figure 7), we can improve the ACK efficiency and don't reduce the reliability of the data transmission.

Figure 6 Packet check mechanism
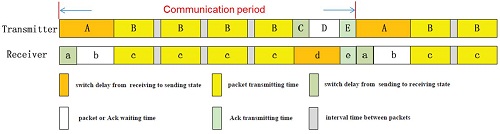
Figure 7 Frame check mechanism
2. Spectrum sensing and spectrum switch technology
Channel interference is another wireless communication challenge, the wireless link may be blocked. The system can take the spectrum sensing and spectrum switch to anti the interference and recovery the wireless link as figure 8 show. There are three steps to ensure the system can switch to a clean channel and ensure the communication quality.
(1) Spectrum sensing: the PXI found the data link was blocked, it would adopt energy sensing method to detect each channel whether exist interference signal. The PXI sensing all channels and obtain the report of each channel
(2) Send the sensing report to the mobile terminal, and switch to the same clean channel instantly. The sensing report will attach with the frame acknowledgement.
(3) To guarantee the switch success, the PXI will monitor the switch failure event, if it found the switch is fail and it will send the report again
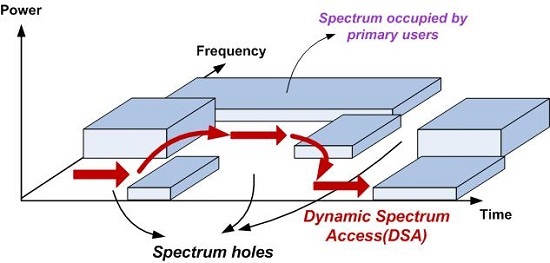
Figure 8 Spectrum sensing and Spectrum switch
About the spectrum sensing and spectrum switch technology, there is a video demo to show the effect http://v.youku.com/v_show/id_XNTYzNzk1MTcy.html
3. Power control and cooperative relay
With the mobile terminal move in the unknown environment, the distance between mobile terminal and PXI controller will become larger and the communication quality may decrease. The mobile terminal can adjust the power according to the communication quality. However, if the power adjust to the largest, the quality is still poor, the PXI will assign an relay robot to help the mobile terminal transmit the information. The relay robot can help the mobile terminal detect a larger area of the unknown environment.
Signal process:
Our system need to receive the information of multi mobile terminal at the same time, however, the ability of the PXIe-8133 is limited, so we adopt the FPGA to help parallel demodulate the multi mobile terminal data. About the process abiltiy of FPGA, we have a demo to show it . http://v.youku.com/v_show/id_XNTYzNzk1OTUy.html
Realization
We have implemented the function flow at the mobile terminal and PXI controller as figure 9.
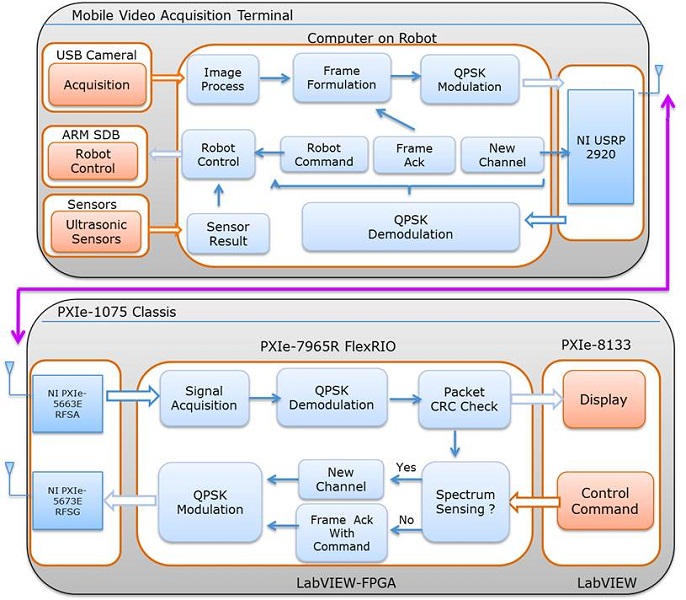
Figure 9 Function flow of system
The operation interface of our system is as figure 10, the operation interface include four parts, one page used for control the robot, one page used for indicate the channel situation, another is the wireless communication status , the last is the parameters configure page.
Our system video http://v.youku.com/v_show/id_XNTYzNzk2NTM2.html.
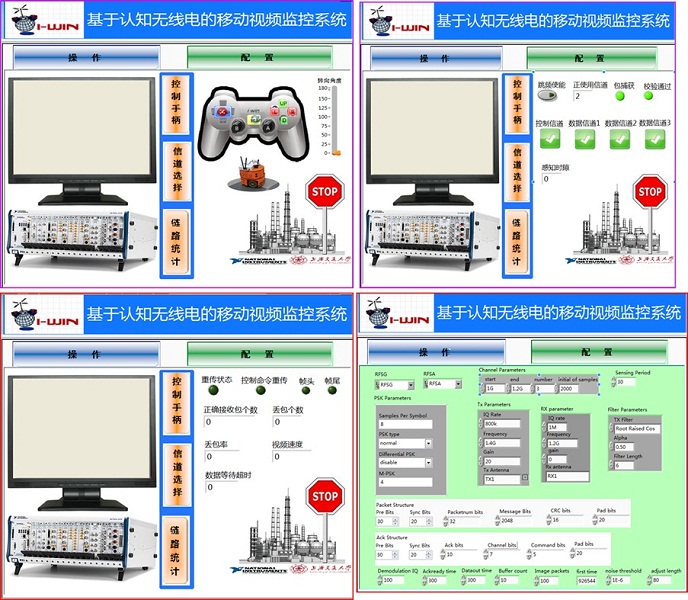
Figure 10 Operation interface
Benefit of using LabVIEW and NI tool
1. The NI USRP is an open soft define radio platform, compare with the Gnuradio in the Linux system, the NI USRP is much easy to start and develop. LabvIEW offers abundant Vi to help the developer realize the user-defined wireless communication protocol.
2. PXI architecture makes the software radio platform has better performance and scalability, the introduction of FPGA greatly improves the performance of the system, LabvIEW FPGA is simple, easy to operate, the development difficulty is greatly decrease.
3. LabvIEW powerful software module allows us to focus more on the system design and validation of the algorithm, and algorithm implementation difficulty and development cycle have been reduced greatly.
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
perfect
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
well done
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
cool!!
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
fabulous!!!
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
fantasy!
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
good job~
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
nice
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
wonderful
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
sounds interesting.
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
marvolous
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
 niu
niu
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
good work!
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
good job
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
good
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
It is a potential product.sounds good and design perfect.
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
excellent
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
虽然没有看懂,但还是全力支持啦~~哈哈,加油!
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
bingo
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
perfect
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
great
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
FULL SUPPORT
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
不明觉厉!
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Perfect!
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
这是什么啊 老谭!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!1
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
I feel it very good,and I wish you will be successful!
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
bravo
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Very very good!
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
表示很吃惊,做的挺好的!
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
nice!fighting
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
cool!
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
well done!
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
It's perfect! I love it.
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
COOOOOL!!! I Love it
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
wonderful~~~
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Best wishes to you,my guy!
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
年轻有为的青年呀。
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
I feel it very good,and I wish you will be successful!
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Fantastic
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
good!!
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
So nice!
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
well done!
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
impressive!
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
结构清晰,思路完整。非常好
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
congrats
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
great!
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Pretty good!Hope you can achieve your goal.
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
that will be useful!cool!
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
wonderful !!!
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
wonderful
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
come on!
