Endurable Remote Vision Platform(ERVP)
Contact information
University: Mälardalen University
Team members: Anders Olsson, Daniel Adolfsson, Philip Johansson
Faculty Advisor: Martin Ekström
Submission Language: English
Description
The goal of this project has been to create a remote and mobile platform for vision
acquisition where processing and planning of action can not only be done onboard but also on a
remote computer delivering possibilities of multiple implementations. This is achieved by the
streaming of both depth information and dual RGB channels. The steering is controlled by two
stepper motors which
NI products used
MyRio x2
The Challenge
- Building the electronics
- Designing the motor driver
- Making a compact and smart design containing all from power supply to motor controller.
- Communicating with the MyRIO
- Installing needed drivers on MyRIO and setting it up for network communication
- Receive the datastreams (Dual RGB video and depth)
- Network variables
- Drive and steering
The Solution
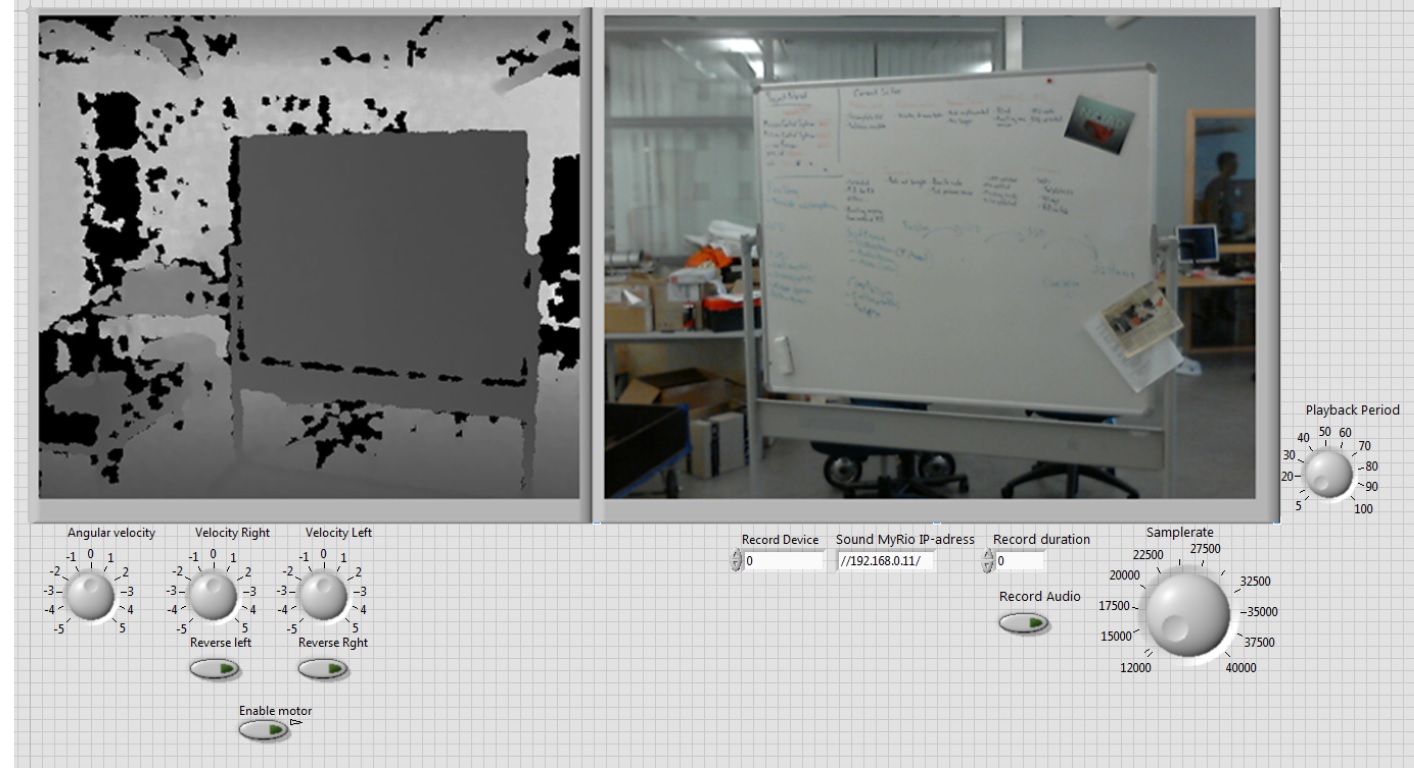
From the front panel the motors can be
controlled and the two VI’s running on the
MyRio’s also stream the image descriptors to
the front panel VI running on the computer. A
capture of this front panel is presented below.
From this system there is now easy to further
dive into the “world of machine vision”.
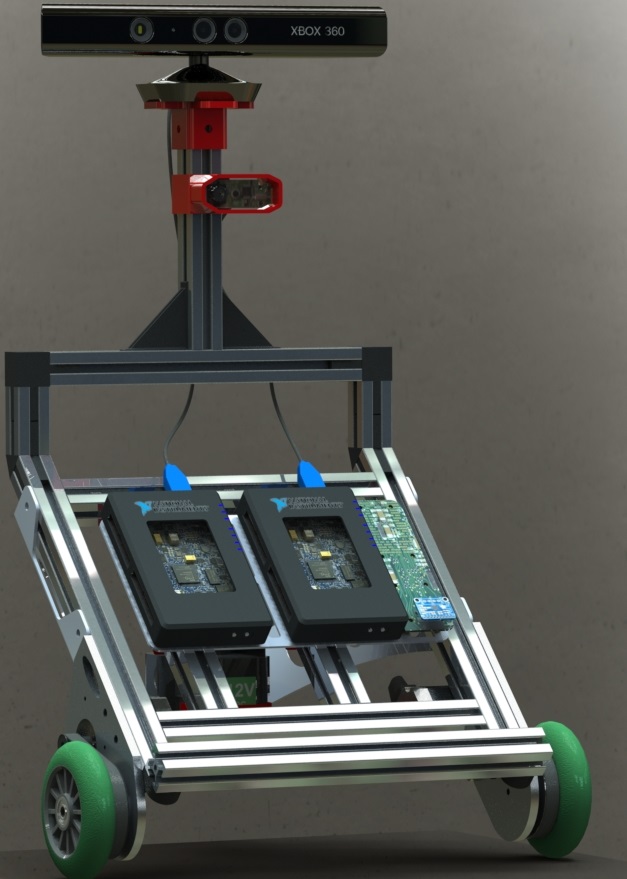
Hardware
Microsoft Kinect depth sensor
USB webcam(UVC)
Stepper motors
Software and modules:
Labview 2013
Labview RealTime
modules
Labview Robotics module
Labview MyRIO module and toolkit
Labview VISA module
Vision Acquisition
Machine Vision
Circuit Design Suite 2013
Links and References
Using Microsoft Kinect with myRIO (update)
