ni.com is currently undergoing scheduled maintenance.
Some services may be unavailable at this time. Please contact us for help or try again later.
- Document History
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
Autonomous Airship Project, UK
Contact Information
University: University of Leeds
Team Member(s): Joe Beaumont, Davis Chamia, Rhys Neild, Leo Rampen
Faculty Advisors: Rob Hewson, Martin Levesley, Peter Culmer
Email Address: leedsblimp@gmail.com
Country: UK
Project Information
Title:
Design of an Autonomous Airship Observation Platform
Description:
We are a team of 4 students from the University of Leeds, UK, currently involved in the design and manufacture of an airship that will incorporate autonomous navigation and buoyant technology to achieve high endurance flight for industrial inspection, surveillance and mapping applications.
Products:
sbRIO, LabView, IMAQdx
The Challenge:
The goal of this project is to demonstrate an autonomous airship for the purpose of low cost observation. Low cost observation platforms are becoming increasingly in demand. Whether it is for remote observation for civil law enforcement, mapping applications or powerline inspection. The project will deliver a demonstrator of the low cost observation platform for a payload of sensors (weighing in the region of 0.5kg) The system will have a degree of autonomy and ideally will have a degree of navigational capability (such as that provided through GPS and inertial sensors). The outcome of the project will be a flight demonstration of the system
The Solution:
Work has been proceeding to design and manufacture a blimp that will be capable of transmitting real time video data to the operator from an aerial location over long endurance flights. A helium envelope will hold 2.3 cubic meters of helium in order to give the aircraft buoyancy, accounting for 91% of the total weight. The propulsion system consists of 3 propellers in order to achieve a fast forward velocity as well as a high level of maneuverability. The control of this system will be made possible using a sbRIO housed in a gondola on the underside of the blimp. A high resolution IP camera will be used to capture video. This will analysed using NI IMAQdx so that the airship can navigate autonomously and compressed so that it can be transmitted and monitored by the user at the ground station. The sensor suite onboard the airship consists of an ultrasonic range finder to give accurate altitude near the ground, an inertial measurement unit to give orientation and a GPS module for position over a long range.

DESIGN
The design of the airship has come to fruition through the contributions of the individual team members in the following areas.
Joe has been responsible for the design and manufacture of the gas envelope and tail fins as well as the development of the flight physics section of the simulation. The envelope shape chosen has an efficient aerodynamic shape over a range of flight profiles whilst also having a low structural weight. Many unconventional designs were also considered but it was found they were not suitable for our specifications. The tail fins were sized such as to negate the unstable aerodynamic moment which would have been produced by a bare hull. The flight physics simulation consists of the 6 degree of freedom non-linear equations of motion for the airship with slender body theory used to develop expressions for the aerodynamic forces and moments.
Davis has been working on the design of the propulsion system to enable the blimp to maneuver effectively whilst minimizing the power consumption. This work involves testing a wide range of motor and propeller combinations and recording their performance in terms of thrust and efficiency. The propulsion layout consists of two main motors mounted on a single shaft to control surge and heave and a rear motor to provide pitch and yaw control.
Rhys' work has been divided between two distinct areas: the design of the gondola and the vision system. The gondola design calls for a structure that can house the components securely whilst minimizing drag and weight. The components are housed in two separate gondolas so that the centre of mass and center of thrust can be positioned independently. Industrial manufacturing techniques have been employed to build two gondolas that fulfil the structural, aerodynamic and mass requirements. The vision system aims to complement the navigation system to provide relative localization in unmapped environments. Using a lightweight IP camera, the opportunity is presented to fulfil the observation requirements, via a wireless communication link, and augment the autonomous navigation capabilities through image processing techniques.
Leo has designed the electronics and systems that enable communication between all the actuation and sensing hardware on board. This has required implementation of the I2C protocol for sensors, Pulse Width Modulation for motor and servo commands and a TCP IP protocol to enable communication with the ground station over WiFi. Leo has also been working on a control system so that active stabilization and positional control can be accomplished using several independent PID feedback loops.
SIMULATION
A simulation of the blimp has been established so that the control system can be tested.
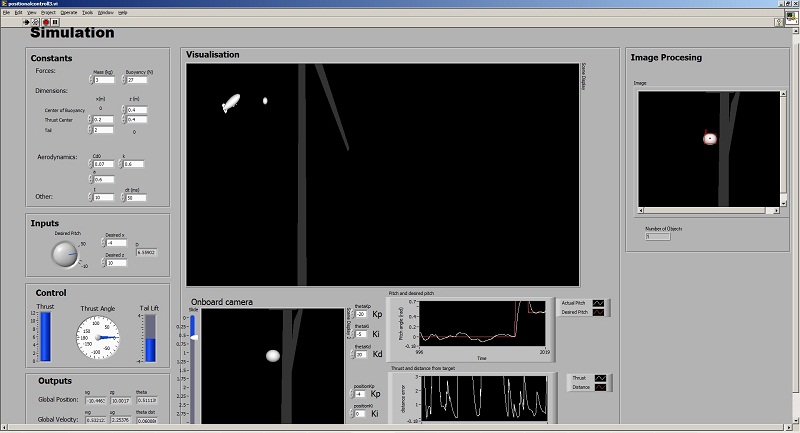 The image above shows the blimp represented as an imported .stl graphic in the OpenGL API in Labview. Inputs are given by the user to control the orientation and position of the blimp. A real time controller generates motor inputs based on a PID feedback loop. These motor commands are used in a dynamic model along with aerodynamic effects to generate responses that define the vehicle state in each iteration of the loop. This simulation has aided the development of controller tuning by analyzing the responses such as the pitch orientation shown by the waveform graph. The scene is simulated from the camera perspective so that the software governing the camera gimbal can be tested. The window on the right shows image processing implemented to detect the position of the virtual sphere.
The image above shows the blimp represented as an imported .stl graphic in the OpenGL API in Labview. Inputs are given by the user to control the orientation and position of the blimp. A real time controller generates motor inputs based on a PID feedback loop. These motor commands are used in a dynamic model along with aerodynamic effects to generate responses that define the vehicle state in each iteration of the loop. This simulation has aided the development of controller tuning by analyzing the responses such as the pitch orientation shown by the waveform graph. The scene is simulated from the camera perspective so that the software governing the camera gimbal can be tested. The window on the right shows image processing implemented to detect the position of the virtual sphere.
PROTOTYPING

This prototype was made to familiarize ourselves with manufacturing techniques with the polyurethane material. It is 1/4 scale of the length and 1/64 of the volume of the full scale blimp.

The electronics were also prototyped. This image shows the rangefinder, inertial measurement unit and GPS breakout board being interfaced with the sbRIO9602 for testing purposes.
MANUFACTURING
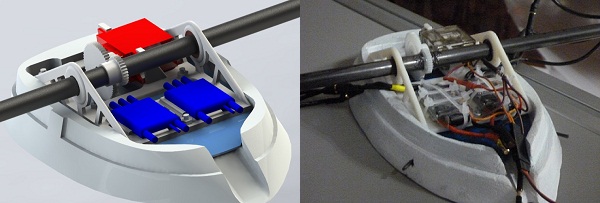
These images show the propulsion gondola assembly. The 1m length carbon rod can rotate 360 degrees to enable trust vectoring. Two electronic speed controllers are used to control the brushless motors on the ends of the rod. This propulsion system is complemented by a rear motor that is housed in the downward vertical fin to provide yaw and pitch control.

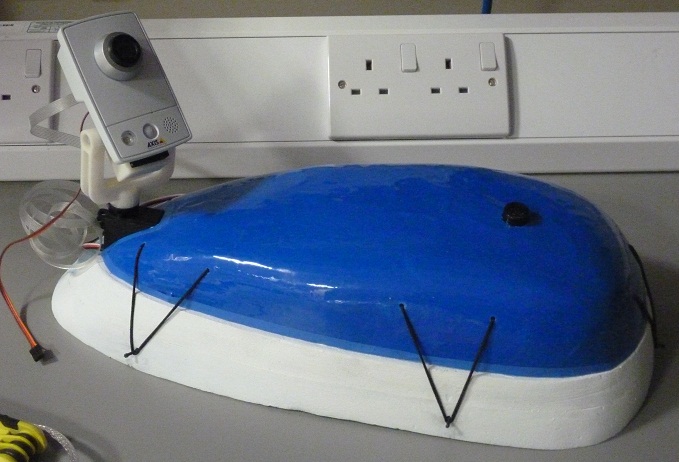
This image shows the main gondola used to hold the battery, the sbRIO and the sensor suite including an Axis IP camera mounted on a 2-axis gimbal. The base of the gondola is manufactured from a closed cell expanded polystyrene and the canopy is a vacuum formed High Impact polystyrene plastic. The weight of this assembly is approximately 1.2kg.

The helium envelope can hold 2300 liters of helium giving a buoyancy force of 2.3kg. The video below shows the envelopebeing inflated with air to check for leaks.
FUTURE WORK
We are currently working to integrate the dynamic modeling into our high-level software so that we can validate all the controls communication and navigation software in a simulated environment. Flight tests are to commence shortly which will enable us to improve the autonomy of the navigation system.
Thanks for reading. Please 'like'
{kind=link}
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Hey LeedsUniversityBlimpBuilders,
Thank you so much for your project submission into the Global NI LabVIEW Student Design Competition. It looks great! Make sure you share your project URL (https://decibel.ni.com/content/docs/DOC-20628) with your peers and faculty so you can collect votes ("likes") for your project and win. If any of your friends have any questions about how to go about "voting" for your project, tell them to read this brief document (https://decibel.ni.com/content/docs/DOC-16409). If your team is interested in getting certified in LabVIEW, we are offering students who participate in our Global NI LabVIEW Student Design Competition the opportunity to achieve certification at a fraction of the cost. It’s a great opportunity to test your skills and enhance your resume at the same time. Check it out: https://lumen.ni.com/nicif/us/academiccladstudentdiscount/preview.xhtml
Good luck!
Sadaf in Austin, Texas
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Hey guys,
Great job with the blimp! Thank you so much for sharing the article with us.
I have a question of you - you mention the words "wireless communications link." I was trained as a telecommunications technician out of school, and in fact will be commencing my electrical engineering degree next year as an adult. When I read documents like these, I always tend to wonder, what technology and protocol was employed, and on what basis was it decided to use that technology and protocol?
Unfortunately, most of these documents are written by control theory people, and lip service is paid to the information theory, as if its "just a black box." With pretty much every protocol out there, you soon learn from the bewildering array of choices, it is not just a black box. Now, this is not a direct criticism of your document, it is a constructive thought, I read plenty of these types of documents about mobile robotics, and they all say the same thing - nothing about the movtivation of the choice of wireless link.
The reason I ask this of you is my motivation for deciding to make a blimp my first mobile robot, even over a rover, or quadcopter. I have a scenario, an orienteering arena about 30km square, over some nice, rugged terrain. To ensure the safety of the orienteering groups, I am part of a team that manages radios, computers, and wireless networks to ensure their safety. All these deployments are done in remote areas, everything has to powered off batteries, solar panels, and/ or generators.
I was asked, could I put a quadcopter in the sky, in a fixed position, approximately 50 metres in the air, for about six hours. It was determined we would need a generator with 90VDC up a zip line in order to keep this quadcopter in a stable position. Certainly, it would be rock solid, even with prevailing wind conditions, but if there was a failure in one of motors, or we didn't fuel up to it, it would quickly fall out of the sky.
Describing this scenario with the quadcopter, my girlfriend made me do an about face with a simple suggestion: "What about a Zeppelin, Shane?"
Perfect idea.
A blimp could go up to 200 metres into the air, with little energy needed to get it there, the only energy needed is to keep it in position, but for our needs, "position" refers to anywhere in a 5km square sector. Communications over such a distance, at the speed needed to stream sensor, command, and RoIP data, would have only one cadidate today - LTE.
Now, you're probably going "This guy is an information theory geek..." and you'd be right - I know of a project called OpenLTE, that uses an Ettus Research B200 software defined radio as an eNodeB, or base station. Ettus Research is owned by National Instruments. So, I'd like to use an Ettus radio, and a NI myRIO controller, with a few other software bits and pieces I know, and a nice fast commodity computer (simply, its a hacked games console, but its previous two iterations both had officially endorsed Linux developer programs, I participated in both programs), some tracking antennae (a yagi antenna pointed at the target, tracked on a tripod with a servo driven mount), and with this, free my robots from the research lab.
I've done some control firmwares of non-networked embedded computers, and hope to do some training in data acquisition in LabVIEW during the week, as well as discuss my options when it comes to all of these systems, as the information theory is the stronger of my areas, even if I want to build up the control theory side of things.
In any case, I rarely have the chance to respond to an article like this in this way, and I thought I'd share some of my thoughts on the communications side of things, as well as the real world applications of the systems. Once again, thank you for sharing your article, I really enjoyed reading about your project, and will use its lessons in my future work.
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
I'd just re-read the article - wifi! Never helps when you're watching Startship Troopers. My apologies.
My comments on the long range of LTE and the tracking antennae still stand, and my use of Ettus SDRs and OpenLTE, with the correct licecing in place, will be a large part of my research, and the movtivation of placing a relatively stable platform 200 metres up is a driving factor now for using a blimp as my first mobile robot.
