- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
Watchdog Error/Expiration Problem
02-14-2011 06:30 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
Hi,
I recently modified my code to be in the Begin VI, Autonomous VI, Teleop VI, and Finish VI.
All of the Watchdog connections are connected.
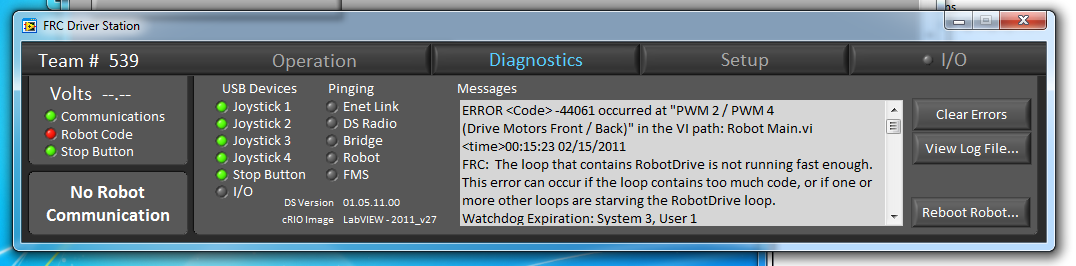
I am receiving several errors (see Error Picture and attachment Error)
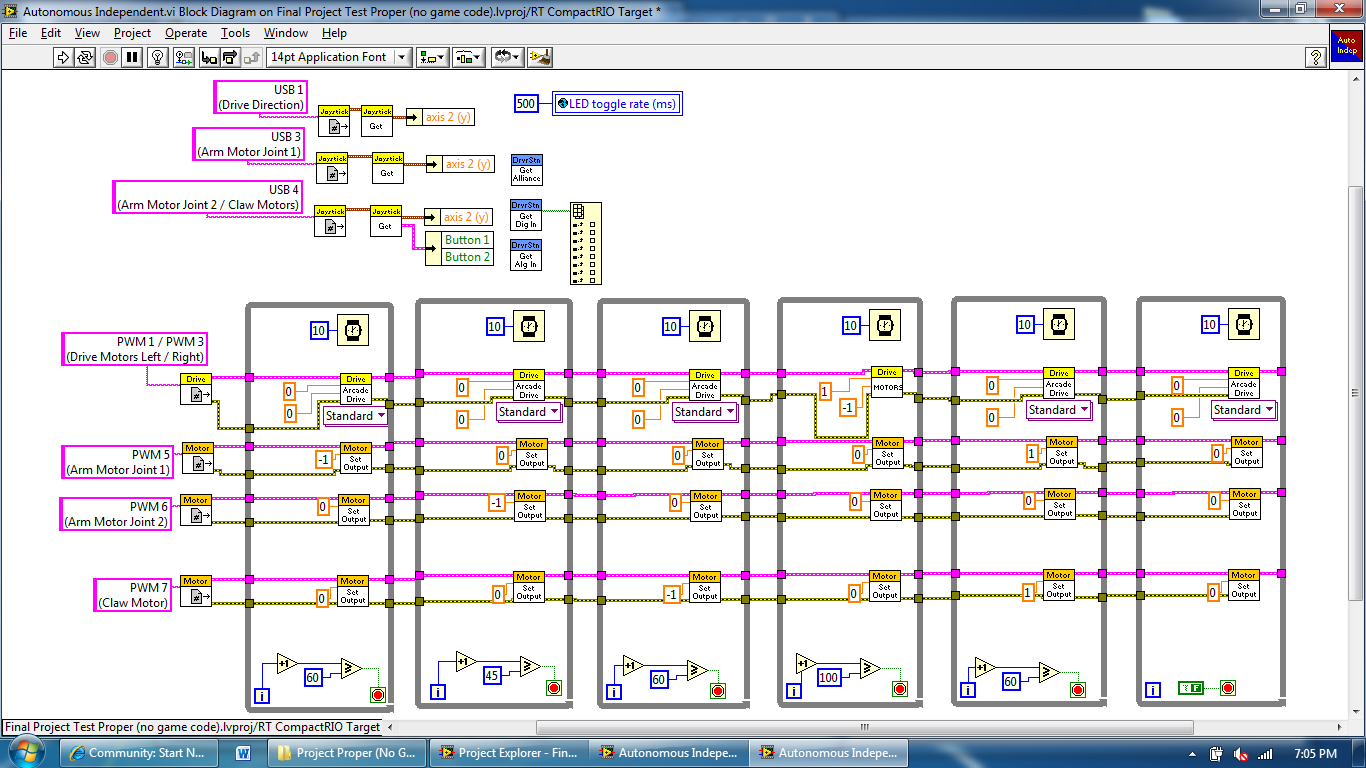
I have went through everything and their seems to be no waits (except for in the autonomous, which I cut down from 50)
All the code is provided in pictures and in attachments,
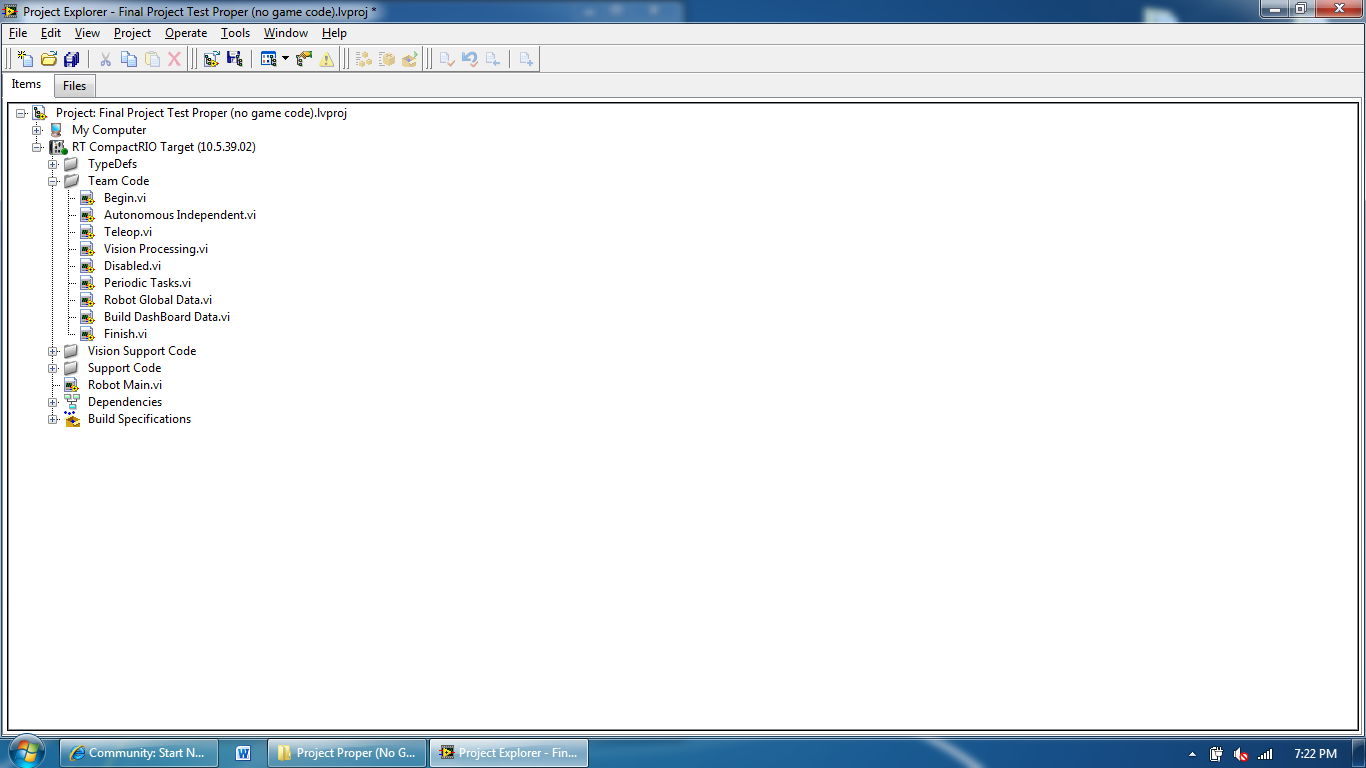
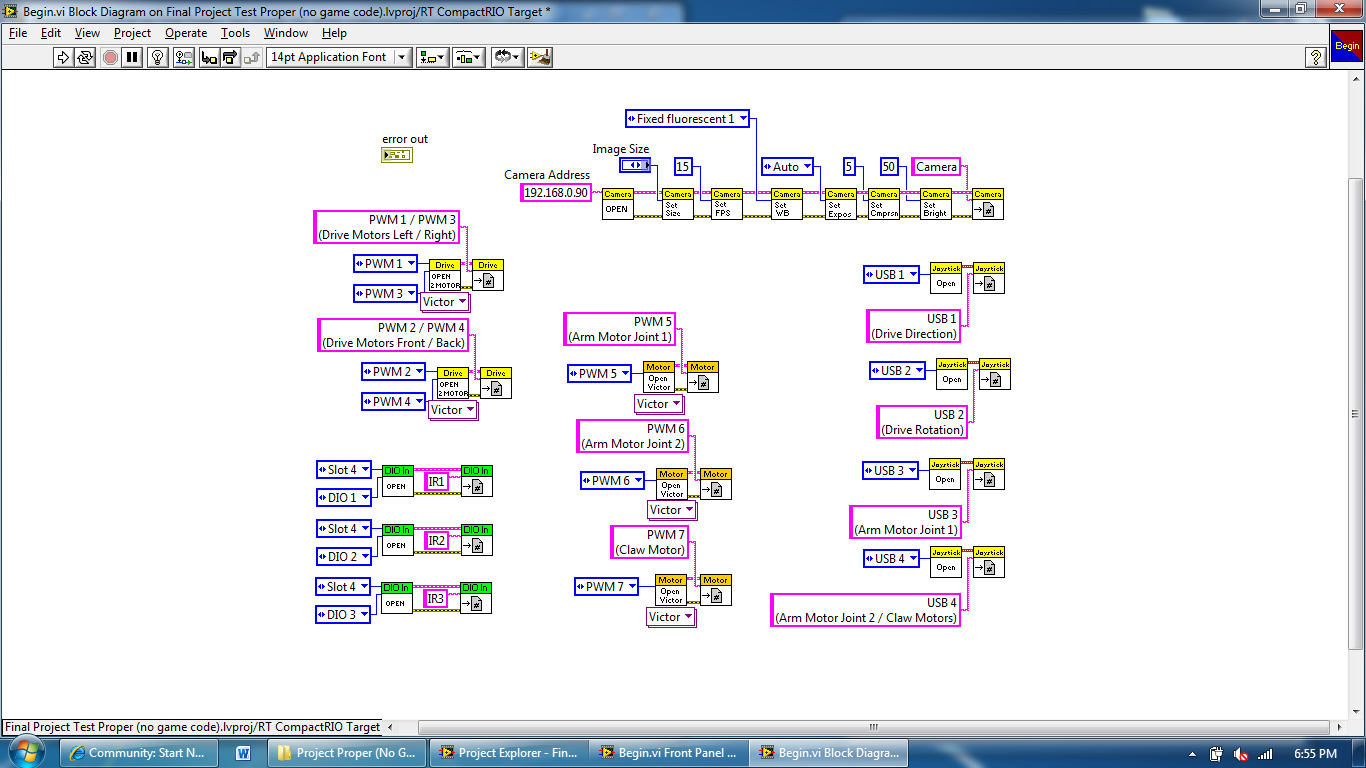
Project Explorer (Project Explorer), Robot Main VI (Robot Main), Begin VI (Begin), Autonomous Independent VI (Autonomous), Teleop VI (Teleop), and Finish VI (Finish).
I am running the code from the Robot Main VI. (I have also tried permanent deploying code but still get Watchdog Error.
How can i rearrange the code to make it run properly?
Codes:
Project Explorer
Robot Main

Begin
Autonomous
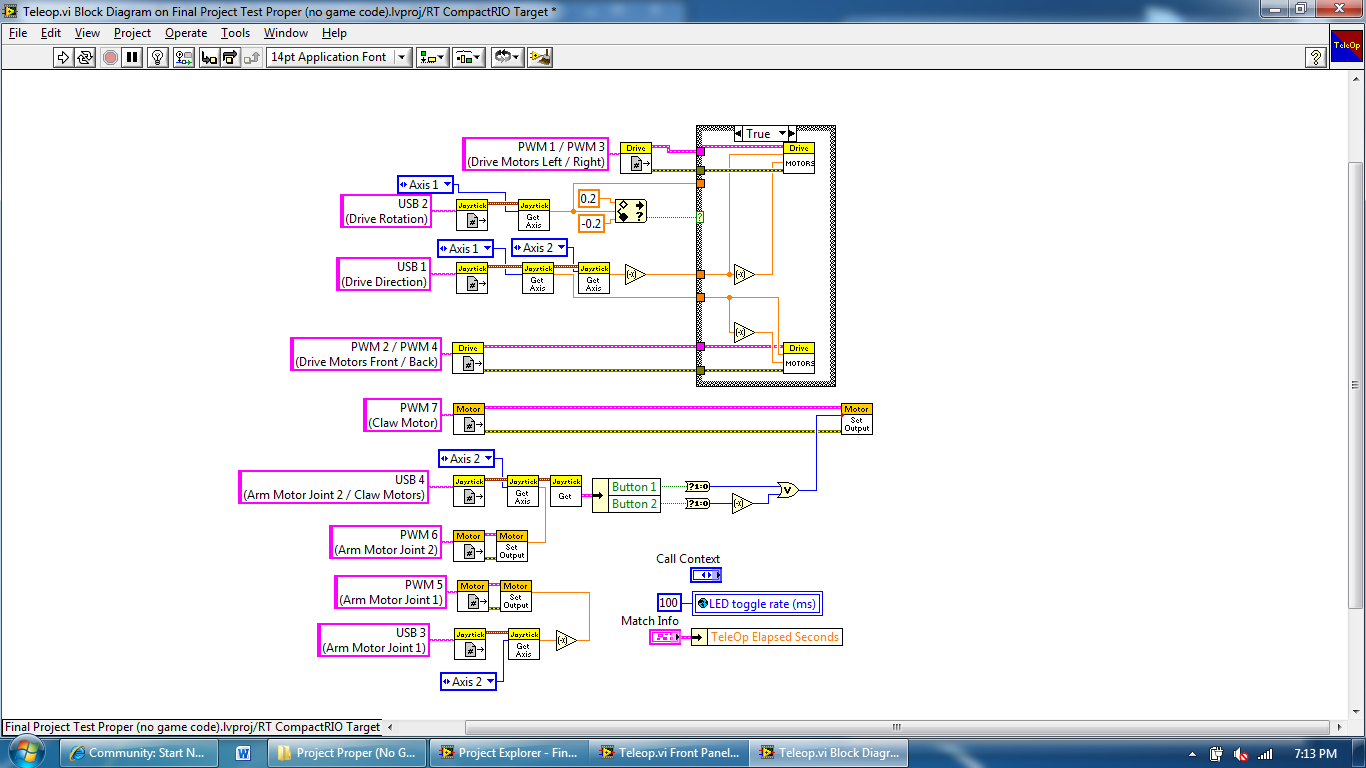
Teleop
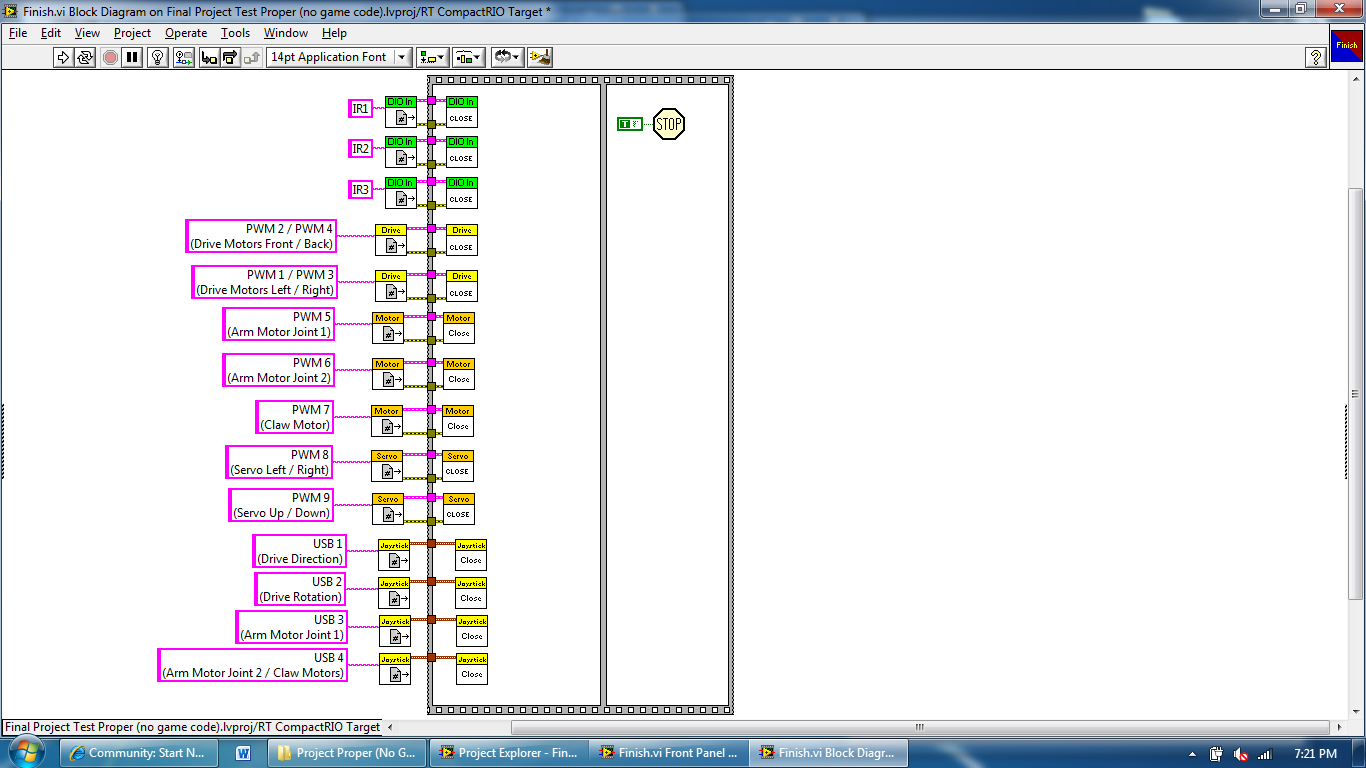
Finish
Thanks,
Davis Catherman
02-15-2011 10:29 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
Do you ever set the watchdog anywhere in your code? Somewhere inside your Robot Main you need to reset the watchdog regularly. Unfortunately I do not have access to the FRC version of LabVIEW at the moment to check how the examples are set up nor provide the name of the function, but you should be able to find it easily if you look through the example code.
02-15-2011 04:54 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
As nathand said, it doesn't look like you are using the Watchdog anywhere in your code. The timeout you are experiencing is probably due to the Safety Config feature which is new to LabVIEW FRC 2011. You can learn more about it here.
Regards,
Barron
Applications Engineering
National Instruments
02-15-2011 06:02 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
Hi,
I'm not sure if it could be a safety config error cause it says watchdog expiration. (As ahown in picture)
I tried a few different ways but didn't get anything to work. How should I set this up?
Thanks,
Davis catherman
02-15-2011 07:02 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
Ah, now I get it - I didn't know about the new Safety Config feature (I moved this summer and didn't find a new team to mentor so my apologies if my earlier comment, based on last year's knowledge, was misleading).
The error message you displayed explains exactly where the error is - it's that you're not updating motors 2/4 often enough. This is also clear from your autonomous, which sets motors 1/3 regularly but only sets 2/4 once. Try setting values to motors 2/4 inside the loops in your autonomous, even if the value doesn't change.
02-15-2011 07:44 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
well,
I'll give it a try.
Didn't even think to add those motors. Since the robot has 2 wheels facing forward and 2 wheels facing to the side (so only the forward wheels would be needed).
Also about Barron's comment, after some thought I realized what you meant in a different way. I was thinking that I didn't implement any safety config yet it still managed to be an error. But now I think i understand that there is a overall safety config that noticed there being no watchdog, therefore temporarily stopping the robot.
I'll let you know how it goes tomorrow.
Thanks,
Davis Catherman
02-17-2011 03:03 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
Hey Davis,
Were you able to get those timeout errors resolved?
Regards,
Barron
Applications Engineering
National Instruments
02-17-2011 03:09 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
Hi,
Will know in a hour or so.
My mentor decided to completely change drive trains 2 days ago. And we have to get it ready for a scrimmage on Saturday.
Thanks for checking in,
Davis Catherman
02-18-2011 05:06 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
I think it seems to work now.
Not running into anymore "temporarily disabled" robot.
What I did was, open it then in telop use the "Feed" and it works.
Thanks,
Davis Catherman
