- Document History
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
The Next Generation Laparoscopic Surgical Robot System with Hands-On-Throttle-And-Stick (HOTAS) Controller System
Submission Template for Student Design Competition 2014
Contact Information
University: Seoul National University
Team Members (with year of graduation):
Chiwon Lee (2011, BS, Ph.D. Candidate)
Wonshik Kim (2012, BS, MS Candidate)
Myungjoon Kim (2012, BS, Ph.D. Candidate)
Woojung Park (2010, High School, BS Candidate)
Faculty Advisers: Sungwan Kim (College of Medicine, Biomedical Engineering)
Email Address: lcwkf16@snu.ac.kr
Submission Language: English
Project Information
Title:
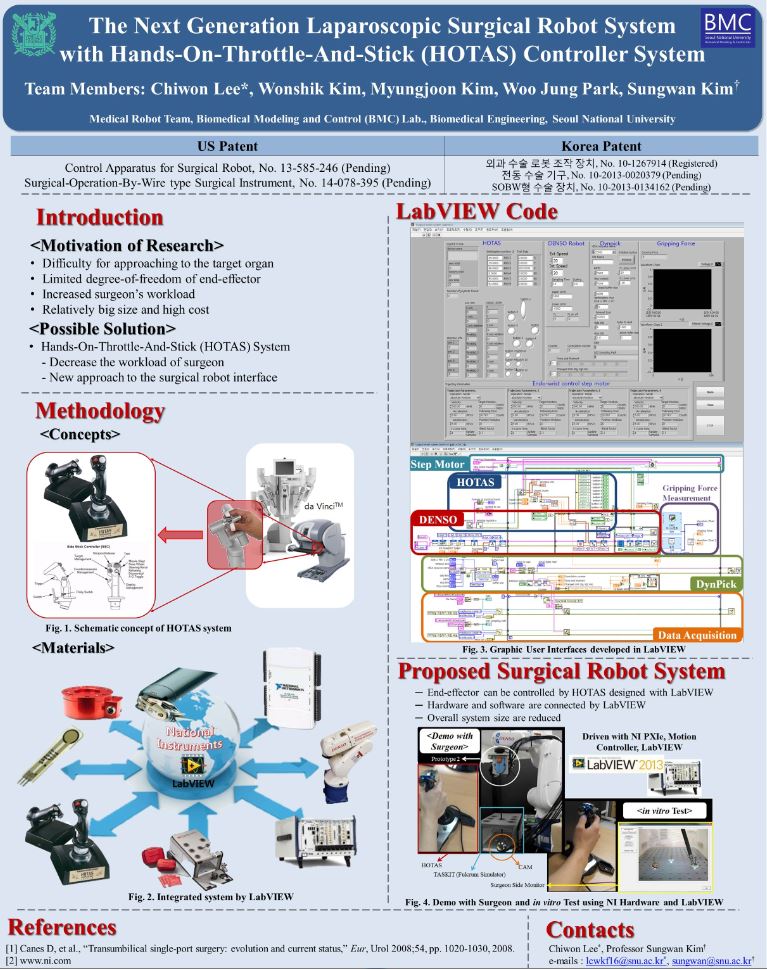
The Next Generation Laparoscopic Surgical Robot System with Hands-On-Throttle-And-Stick (HOTAS) Controller System
Description:
The main purpose of this project is to develop the next generation laparoscopic surgical robot system with HOTAS controller which had been developed in aerospace engineering. This will result in reducing size of the existing system and the workload for surgeon.
Products:
<The list of NI hardware>
- 1. PXIe-8135 & 1062Q
- 2. NI-7350 (Motion Controller)
- 3. UMI-7774 (Motion Control Interface)
- 4. USB-6212 (DAQ)
<The list of NI software>
- 1. LabVIEW 2013
- 2. Imaging Lab Robotics Library for DENSO
<The list of other hardware>
- 1. VS-6556G (Denso Robot Arm)
- 2. da Vinci EndoWrist (Surgical Instrument)
- 3. Ezi-Servo-28L-D (Stepping Motor & Driver)
- 4. DynPick (6-axis Force/Torque Sensor)
- 5. Flexiforce (Pressure Sensor)
- 6. Saitek Cyborg (Pilot Stick)
- 7. TASKIT (Laparoscopic Surgical Training Kit & Web Cam)
- 8. Torque Transfer Mount (Self-Production)
The Challenge:
There are several drawbacks of the existing laparoscopic devices: 1. Difficulty for approaching to the target organ, 2. Limited degree-of-freedom of end-effector, 3. Increased surgeon’s workload, 4. Relatively big size and 5. High cost.
For solving these limitations, the HOTAS controller system, which is widely using in the aircraft pilot area to operate many functions with one hand by consolidating many buttons/dials/etc. around the pilot stick, is applied to the current laparoscopic device and robot for multi-functionality, modularity and usability in the proposed system. This will reduce the size of the existing system, and also decrease the workload for surgeon.
The Solution:
<How our project works?>
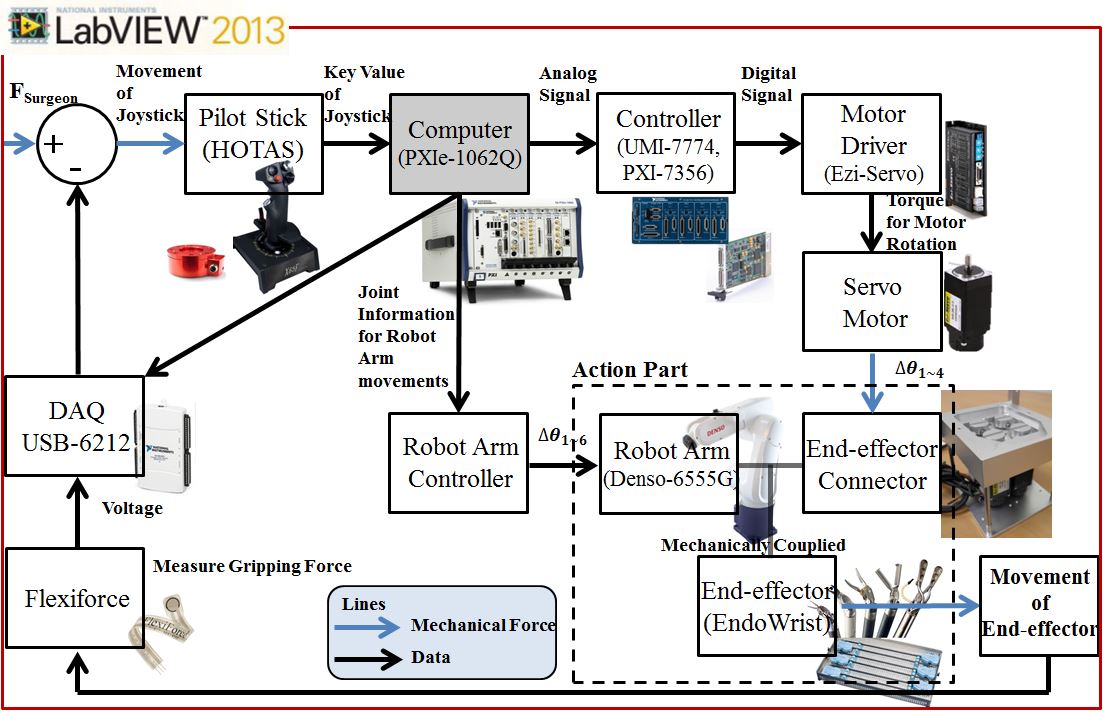 Control Flow of the Proposed System
Control Flow of the Proposed System
For applying the HOTAS controller system to the existing laparoscopic surgical robot system, the NI Motion controller was used with NI PXIe platform.
Furthermore, the algorithm for control system was developed with LabVIEW 2013 and Imaging Lab Robotics Library for DENSO, since the end-effector is mounted on the DENSO robot arm in our system.
Therefore, the integrated system of HOTAS system, NI Motion controller, servo motor and end-effector was successfully developed for the development of the next generation laparoscopic surgical robot system, as described in control flow diagram.
In addition, a flexiforce sensor and a 6-axis force/torque sensor were used in this system for the evaluation of robot system’s performance, and they were integrated with LabVIEW 2013 using the DAQ and serial communication system relatively.
For the last, this project was supported by Basic Science Research Program through the National Research Foundation of Korea (NRF) funded by the Ministry of Education, Science and Technology (2011-0012389).
<The benefits using LabVIEW and NI tools in our project>
As it is mentioned above, our project integrated several systems and since the system will be used in medicine area, the stability of the system is highly significant. In addition, the availability of rapid prototyping was also important. In this sense, there is no doubt that the stability of the NI system and LabVIEW software will provide excellent benefits for our system.
Furthermore, NI medical software validation will be completely helpful for testing our system before the clinical trial.
In these aspects, it was our credit that we chose to use the NI system and LabVIEW software.
As a result, it was confirmed that the proposed robot system was able to generate a bigger force than that of the da Vinci robot system, and the size of the whole system was also reduced.
<Insert image(s) of project with captions.>
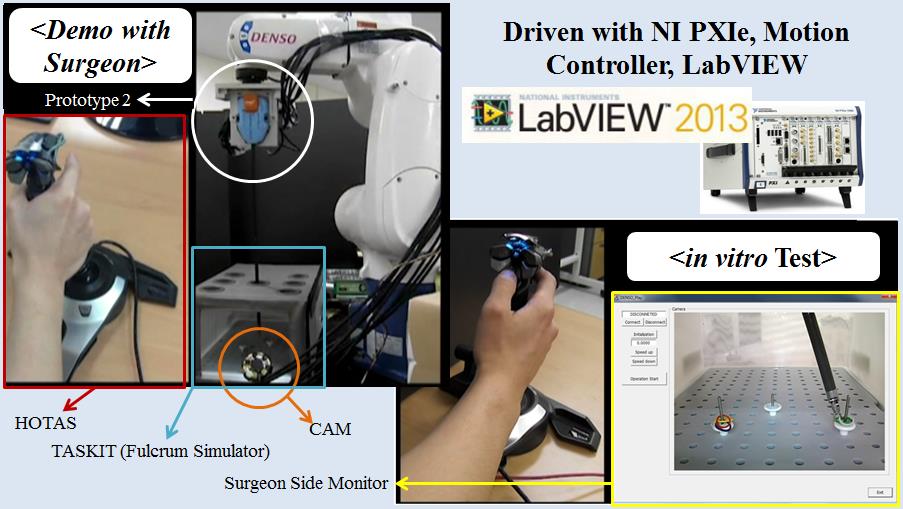 Demo with Surgeon and in vitro Test using NI Hardware and LabVIEW
Demo with Surgeon and in vitro Test using NI Hardware and LabVIEW
<Insert video here.>
<Attach VI code (optional).>
<Level of completion (beta, alpha, or fully functional)>
Beta
<Time to build>
8 months
<Additional revisions that could be made>
Force feedback system, which plays a significant role in the surgical robot system, can be an option for the additional revisions that could be made for our system.
Conventional surgical robot system do not have the ability of providing force feedback to a surgeon, loss of force feedback is a disadvantage to surgeons since they are conventionally used to palpating tissues to diagnose tissues as normal or abnormal. Therefore, the need exists to incorporate force feedback into surgical robot system.
Fortunately, because of the fact that the HOTAS controller system was applied to the proposed surgical robot system, it is relatively easy to apply the force feedback function to the propose system, in this reason, the first additional revision is adding the force feedback function.
For the second, the leap motion controller can be applied to the proposed system for unrestraint control of surgeons. The leap motion controller, which was developed by LEAP MOTION, Inc., is able to sense the natural move of human’s hands. Using this controller, unrestraint control is available for surgeon to control the surgical robot system more conveniently.
The feasibility test for the integrated system of the leap motion controller and the proposed system had already been successfully developed with LabVIEW 2013, and there will be further research about unrestraint control for the surgical robot system using the leap motion controller.
Attach Poster
Nominate Your Professor (optional)

Sungwan Kim, professor of biomedical engineering at Seoul National University since 2010, came back to Republic of Korea for integrating aerospace engineering into biomedical engineering after working for 10 years at National Aeronautics and Space Administration.
He’s always emphasized the importance of the safety and the accuracy of the system for clinical trial to his students, and guided them to use the NI hardware and LabVIEW based software for ensuring the stability of the system they developed, such as surgical robot system, rehabilitation robot system, capsule endoscope, and microgravity simulator (3D-clinostat).
As for the in vitro test or demonstration, he stressed the brevity of the code and various LabVIEW design pattern, and always reviewed the code validation for his students.
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
안녕하세요,
수고하셨습니다.
감사합니다.
한국내쇼날인스트루먼트 드림.
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Very interesting 
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
정말 좋은 내용입니다.
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator

- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Interesting!!
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
looks so good
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Wow. Unbelievable.
