- Document History
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
Contact Information
University: Lappeenranta University of Technology, Finland
Team Members: Joel Paananen (2014), Ville Hakonen (2014), Janne Eskelinen (2015)
Faculty Advisers: Prof. Heikki Handroos
Email Address: Joel.Paananen@lut.fi, Heikki.Handroos@lut.fi
Submission Language: English
Project Information
Title: Simulator Platform with Fluidic Muscles
Description: Three fludic muscles are controlled with proportional valves to simulate accelerations aquired from computer game. Proportional valves are voltage controlled. Correct setpoint voltage to control muscle length is calculated with inverse kinematics designed in LabView. This LabView program is suitable for usage with only myRio or computer and Arduino.
Products: myRIO-1900 or Arduino, LabView
Operational Amplifier Circuit
SimTools -program
Festo Fludic Muscles
Festo Proportional Valves
Pneumatic hoses
Steel Structure
The Challenge:Solving the inverse kinematics and actuating fluidic muscles according the acceleration acquired from simulator game.
The Solution: SimTools program is able to patch various simulation games in order to send acceleration data out. Our LabView program collects this data as UDP -packet and uses the values as angles. The angles are sent to function that uses matrix calculus to solve correct lenght for each fluidic muscle. When the length is known, the microcontroller (myRio or Arduino) outputs a setpoint voltage to a proportional valve that controls the pressure inside fluidic muscle.
Communication and data transfer was easy to handle with LabView and by using myRio we were able to send pure analog voltage to pneumatic valves. At next stage the myRio will be setup to communicate via WiFi in order to reduce cables between computer and platform hardware. First prototype worked with Arduino and by this way the microcontroller was actually only voltage output card and performed poorly in that by "simulating" analog output with PWM.

Base Plate with Valves and Muscles
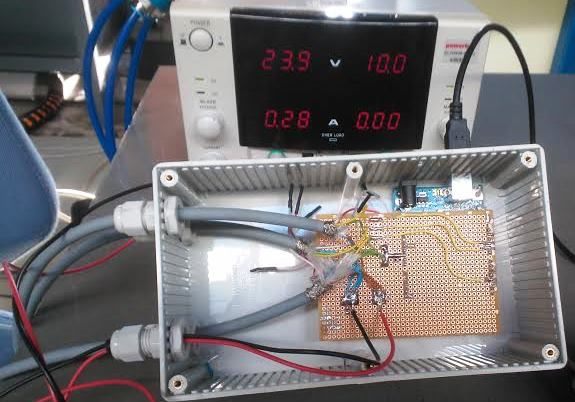
Arduino Setup for valve control. 3 pcs PWM outputs are simulating 0-5V analog out, which is amplified to 0-10 V.

myRIO Setup for valve control. Two analog outputs 0-10 V and one 0-5 V is attached to operational amplifier with gain of 2.
Some movement testing...
This project was launched in january 2013. First mechanical desing was done during the spring 2013. Second phase begun in january 2014 and during this spring also the pneumativcs and electronics were designed. Project will continue next year with new group. Some hardware changes and controller tunign is needed. However, the structure and the inverse kinematics controller is complete and we sugest to use myRio with it. Fluidic Muscles should be replaced with bigger ones and position feedback to the controller should be added.
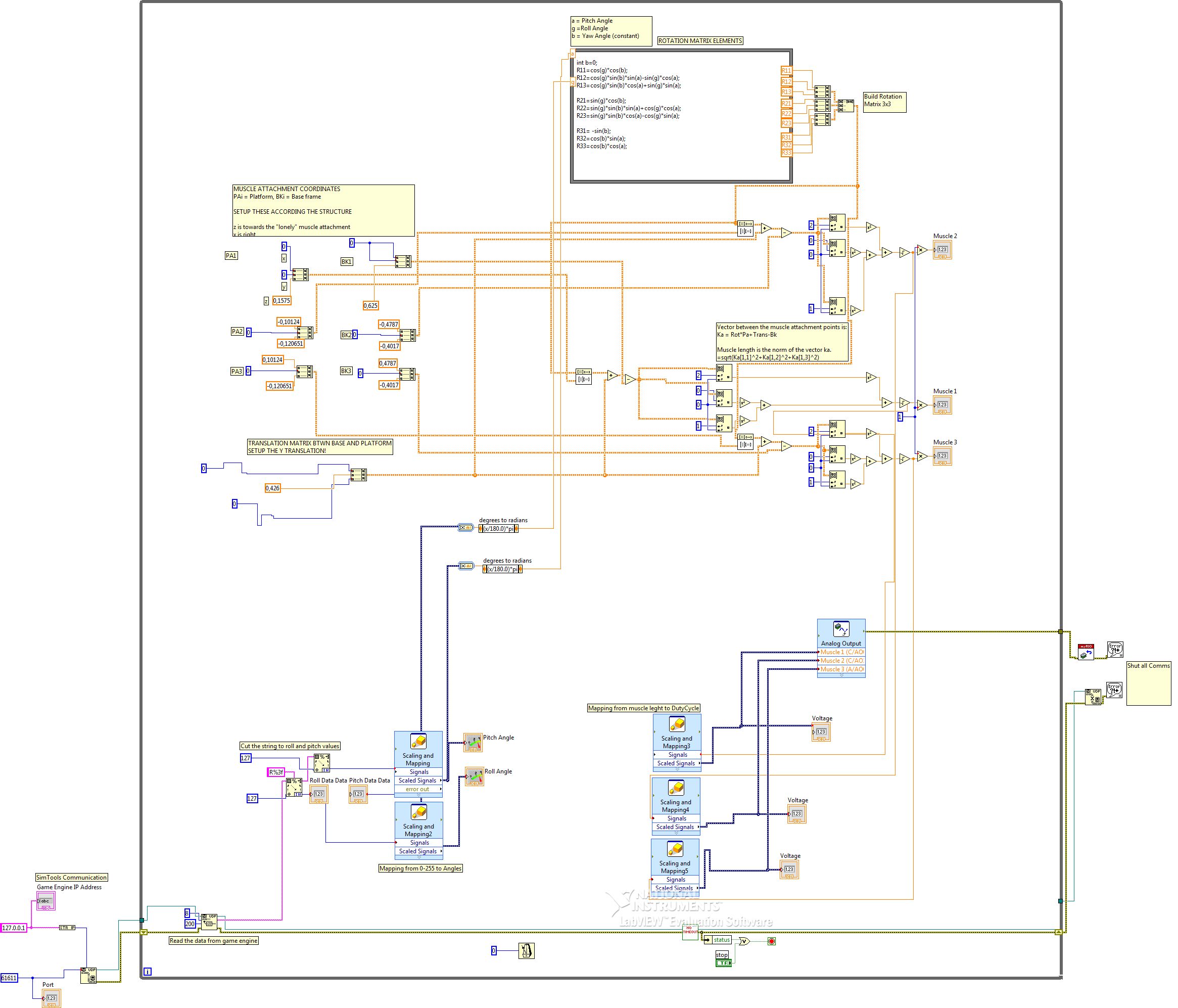
This is the block diagram for our controller.
