- Document History
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
Sepios, the Omnidirectional Cuttlefish Robot
Contact Information
University: Swiss Federal Insititute of Technology Zurich
Team Members: Julian Felix Flury
Submission Language: English
Project Information
Title: Sepios, the Omnidirectional Cuttlefish Robot
Products
LabVIEW myRIO 2013, NI myRIO
The Challenge
Creating a nautical robot driven by cuttlefish inspired fins to study this unique propulsion mechanism and its advantages.
The Solution
A four-finned robot, each fin equipped with nine servo motors to generate waves of various shapes and perform any conceivable manoeuver. All this is coordinated by a single NI myRIO at the heart of the drone.
A Curious Fish
Sepia are a genus of cuttlefish sporting long, side mounted fins which are used to generate thrust by performing undulating motions. This elegant propulsion mechanism allows them to close in on their prey without alerting it. At the same time it enables them to rapidly switch directions and even generate sideward thrust. Fascinated by this unique way of underwater locomotion, we, the Sepios team, decided to replicate and analyze it in the name of science.
The Focus Project Program of ETH Zürich
At the beginning of the third year of studying mechanical engineering at the Swiss Federal Institute of Technology (ETH) students are offered a choice. Either they continue their studies as normal or they can choose to take part in the Focus Project program. Every year multiple projects are offered by various institutes and some, such as is the case here, proposed by students themselves. Project Sepios was initiated as part of this program, supervised by the ETHs Autonomous Systems Lab (ASL). Our team consists of six students of the mechanical engineering department (MAVT), two electrical engineering students (ITET) as well as one exchange student from the Technical University of Delft in the Netherlands.
An Agile Robot
Our robot (Sepios) was created with two major goals in mind. First off, it should focus on imitating the cuttlefish’s side fin propulsion mechanism and ideally operate solely with such fins. Second, we determined that for a lot of the potential applicators of such a technology, precise omnidirectional movement was key and thus our robot was designed to hold up to such standards.
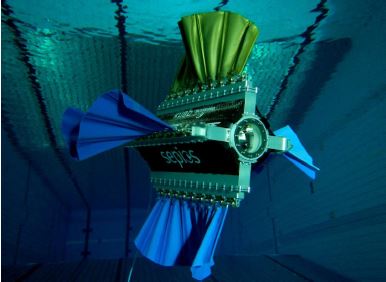
Figure 1: Sepios fully assembled
In contrast to the two-finned actual cuttlefish, Sepios employs four fins but no tail fin or water jet. This is a direct consequence of our intent to focus as much as possible on the fins and neglect the rest of the cuttlefish. Each of these fins consists of nine rays, actuated individually by servos via bevel gears. This gives us the power to perform whatever wave function we like and analyze their impact on the robot. Each of these rays has a range of 270 degrees, allowing a fin to also generate waves in angled stances. This is very useful for certain more acrobatic motions such as barrel rolls. Every fin contains its own servo controller in charge of all the servos.
The four fins are attached to a single central base unit. This contains the only other actuator, a swim bladder used to assist the robot in staying on a level depth. It also contains a camera, and an inertial measurement unit (IMU) to measure acceleration and gyroscopic forces, a laser for collision detection, a humidity sensor to detect potential leaks and a depths sensor to gauge its depth. All of this is fed into a NI myRIO device which takes these inputs as well as a user input provided by Ethernet and computes the proper actions for every single actuator to take in real time.
An Intuitive Control
From the very beginning we always desired our robot to be controllable by a single 3D space mouse. As we are unable to get a velocity or position measurement underwater only the attitude is controllable by using the IMU data. The system is also over actuated, which means that it is not always obvious which combination of fin movements is ideal to recreate a given input. Thus a control allocation problem had to be solved. The allocator now takes the input as specified by the attitude control and distributes it real time to the individual fins in an optimal way using information from a data-based model to compute this optimization problem.
The interface on the input computer which also runs on LabVIEW has many functions which allow the user to view the entire sensor and camera data, as well as an indicator of what the robot is currently doing. There are also many different options to customize the 3D mouse input such as locking different axes and adjusting sensitivity. The user is also able to perform predefined maneuverers by pressing a simple button or if he desires control each fin individually.
Why LabVIEW and myRIO?
The very first prototype of Sepios was a single finned boat driven by Lego NXT bricks. The hardware was done swiftly but we struggled for over a week trying to implement even a simple sine wave in C, until one day a team member suggested we try LabVIEW instead. Within half a day the robot was able to perform any periodic function we could come up with. Following this impressive display of LabVIEWs intuitive graphical programming approach, jumping ship from the planned Raspberry PI system to using a National Instruments myRIO was easy. Our joy was great when we learned that not only would NI sponsor such a device but also provide us with valuable on-site support.
Fast forward to our first tests, once the hardware was sorted out everything else worked perfectly, the depth controller which may have taken ages to implement otherwise worked instantly and the robot performed exactly as we wanted. This would never have been possible using conventional programming tools and the huge amount of time saved by using LabVIEW allowed us to really focus on important areas such as control allocation and creating a handy user interface that would have otherwise likely been outside of the scope of this project.
Conclusion
The robot performs as expected, moving in a myriad of different, impressive ways with a control implemented in less than a semester. This is truly a testament to the power of LabVIEW and the myRIO.
Without it this project would not be where it is today, hopefully providing the future with an intriguing new concept of underwater locomotion.
See videos: https://www.youtube.com/channel/UC0JrltNbSgAVg5zuUs70yqw
{kind=link}
{kind=link}
{kind=link}
{kind=link}
