- Document History
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
Contact Information
University:
ETH Zürich and ZHdK
Team Members:
ETH Zurich Students:
Carlos Gomes, Roman Käslin, Jonas Kühne, Dario Mariani, Milan Schilling, Ian Stähli, Miro Voellmy, Bernhard Winter
ZHdK Students:
Thomas Gemperle, Naomi Stieger
Faculty Advisers:
Péter Fankhauser
Lehmann Daniel
Lennon Rodgers
Email Address:
Submission Language:
English
Project Information
Title:
Scalevo: The stair climbing wheelchair
Description:
The project Scalevo developed a wheelchair that can climb stairs and that balances on two wheels on flat ground.
Products:
LabVIEW myRIO 2014, NI myRIO
The Challenge:
Wheelchair drivers are confronted with unique challenges in their daily life, due to their limited mobility. In older buildings and in cities with insufficient infrastructures stairs are one of the biggest obstacles they might encounter.
The Solution:
A wheelchair that can climb stairs safely and swiftly, which at the same time helps the user in his daily life (Figure 1). It utilises two rubber tracks that fold out to any desired angle, and two large wheels, on which the the chair balances on flat ground. All of these powerful motions are controlled by a single NI myRIO.
Boundless Mobility
Society today is more mobile than ever. Using cars, bicycles, trains and airplanes, people travel continuously without thinking about the challenges that exist for the handicapped. For them basic mobility needs pose obstacles in everyday life that can become insurmountable. There are several attempts to solve these problems with expensive installations such as ramps, elevators and chairlifts. But the feedback received from wheelchair users proves that these approaches are often very slow and make them feel quite exposed. This is where our team wanted to make a difference.

Figure 1: The group behind Scalevo
The Team Scalevo
The group that set out to achieve it’s goals combines many different talents. There are eight students of the Swiss Federal Institute of Technology (ETH) in Zurich, of which seven study mechanical engineering and one electrical engineering, as well as two designer students from the Zurich University of Arts (ZHdK). The project was founded by one of the team members. He proposed it to the Autonomous Systems Lab (ASL), which now supervises the project.
The students of the ETH Zurich could choose this undertaking as part of the yearly “Focus Projects”. These year long project can be done during the third year of our bachelor studies. These ventures allow students to gain so much more more practical experiences than can be gained during the course of a lecture.

Figure 2: Design of the wheelchair
An Ambitious Goal
As mentioned above we just had one year to build a functional prototype. As an electrical wheelchair is a complex and sizable vehicle, it’s creation requires all the tasks to be done as efficiently as possible. In the construction phase it was on us to organize and structure our proceedings.
After the mechanical tasks were completed we had to choose a programming language that allowed us write code in the most time efficient and understandable way. After researching a range of different options, we decided that NI LabView would be the best choice for our project. It’s graphical interface helped the mechanical engineers, of whom many had little experience in programming, get accustomed to the language. It also allowed us to achieve feats that would not have been possible in the same time period with a different software environment.
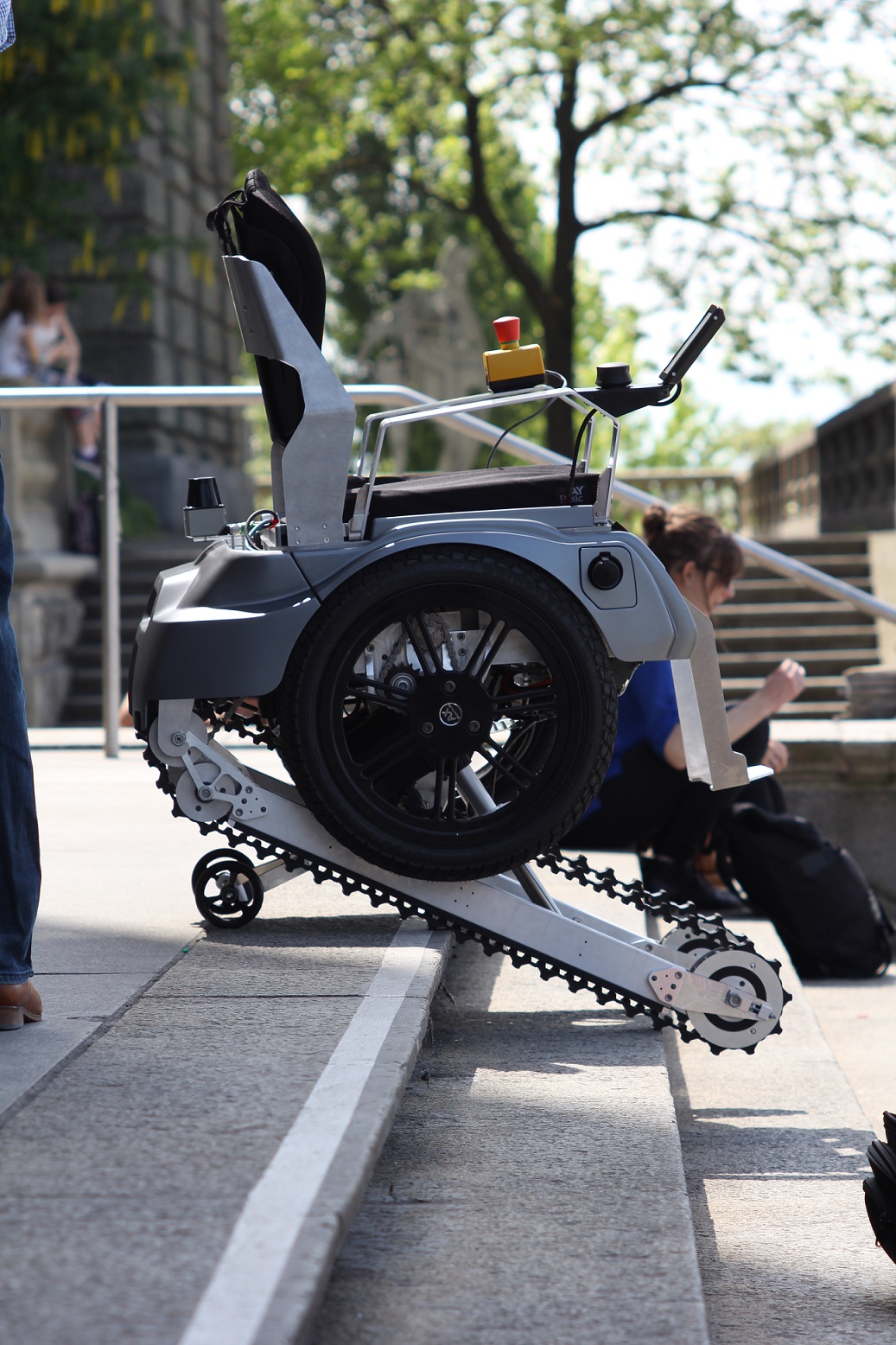
Figure 3: The final prototype
A Multifunctional Device
Our wheelchair combines two well known systems into one spectacular device. On one hand rubber tracks are used, which offer optimal grip on difficult terrain, on the other hand sturdy wheels are implemented that grant mobility and freedom on flat ground.
On the stairs the two tracks are folded out to adjust to the angle of the stairs. The track material was specifically built for stairs, which gives us the desired grip and safety. Once the wheelchair reaches the top of the stairs two small wheels are extended in the back, which prevent the chair from tilting over.
On flat ground the wheelchair balances on the two large wheels. These allow it to turn on spot and to move through tight spaces. The data measured by the IMU and the motor encoders is fed to the NI myRIO. The myRIO uses this information to control the inverted pendulum, which the wheelchair embodies, and allows us to drive securely on only two wheels. Once the driver reaches his destination, the tracks and the wheels can be lowered to the floor, which allows the user to get off safely. This difficult transition phase was also programmed with NI LabVIEW.
Why Labview and myRIO
From the beginning on we knew that time would be of essence. Because of this NI LabVIEW was of great use. It allowed us to swiftly create first programs that could be used for such functions as controlling the motors. Since the graphical interface allowed everyone to get accustomed with the language, programming soon became a team activity. Functions could be easily shared and changes were simple to be made. Furthermore the highlight function improved debugging by a large amount, which meant even more saved time. Also, using shared variables facilitated the usage of the user’s inputs through the touchscreen.
The NI myRIO itself was of great use because of its small and compact size. The casing allowed us to securely mount it to the frame of the wheelchair. The myRIO also included all the necessary interfaces for the electronic components. Furthermore its onboard WLAN was instrumental for the development in early stages, for example while testing smaller prototypes.

Figure 4: Stairs are no longer a burden to wheelchairdrivers
Conclusion
We set out to create a wheelchair that would improve the life of disabled people and give them the mobility that everyone deserves. We believe that with this design we achieved these goals and hope to reach even higher accomplishments in the next year.
All of this would not have been possible without NI LabVIEW 2014 and the myRIO. With these tools we could manage the control of such a vast system and take a step into the future.
Contact
Carlos Gomes
Fokusprojekt Scalevo
ETH Zürich, LEE H315
Leonhardstrasse 21
8092 Zürich
+41787422051
{kind=link}
{kind=link}
{kind=link}
{kind=link}
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Exceptional project!
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
WOW!
