- Document History
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
Contact Information
University: University of Leeds
Team Members (with year of graduation): Miles Dobbie (2014)
Faculty Advisers: Professor Martin Levesley
Email Address: mn10md@leeds.ac.uk
Project Information
Title:
Record and Replicate Human Arm Motion for use in Physiotherapy
Description:
Using a Microsoft Kinect camera, arm movement is recorded. This movement is then reproducd by a two-joint robotic arm controled by a compactRIO.
Products
NI LabVIEW 2011
NI CompactRIO
Kinesthesia toolkit
The Challenge
To develop a method of controlling a two-link robotic arm using movement recorded by a Kinect camera. Identify if this could be potentially used by physiotherapists to assist in delivering rehabilitative care.
The Solution
The process of replicating arm motion was simplified into to three LabVIEW programs:
Motion Capture
The Kinesthesia LabVIEW toolkit was developed by previous students at University of Leeds and is available to download from the NI website. Its VIs were used to develop a LabVIEW program which can record the position of the users hand moving in a flat x - z plane in front of a Kinect camera.
Motion Conversion
The motion is scaled down and converted in to coordinates that the robotic arm can move to, taking its range in to account.
Robot Movement
This program runs on the compactRIO, which controls the voltage applied to the robot's DC motors via a motor control board. By reading the motion coordinates the program calculates the angle each link must turn through to reach each point.
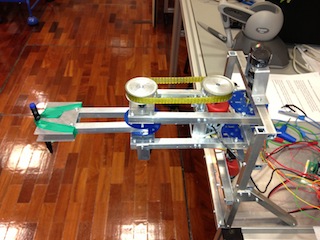
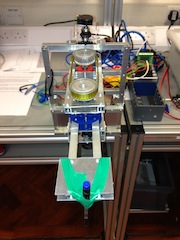
Figure 1 & 2: two-link robotic arm
Preparing a visual comparison of the robot arm output motion to a graph of the original Kinect-recorded motion simply involved plotting the robot motion using a pen attached to the end of the arm, drawing the motion as the arm moves.
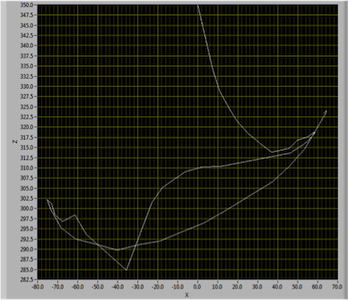
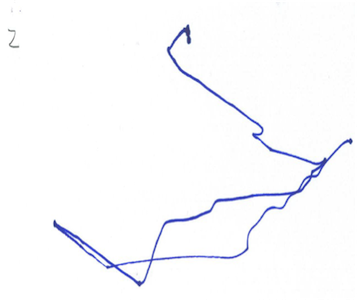
Figure 3: Graph of right hand position recorded by Kinect Figure 4: Plot of the same motion reproduced by the robotic arm
There are several ways in which this system could be used effectively in physiotherapy. A physiotherapist could record an arm motion using a Kinect at their office. The patient could download the coordinate file of the motion and run their personal robotic arm from their own home. Further work to the system could consist of implementing use of the Kinect's RGB camera, providing visual guidance from the physiotherapist. Another function that could be developed is to allow the physiotherapist to control the patient's robotic arm in real time. Future work to the system may also consist of using the Kinect to control a more sophisticated robotic arm than the one used here.
Many other robotic systems within the engineering department at Leeds are programmed in LabVIEW and controlled by a compactRIO. The system here has demonstrated that it could be possible to control other existing robotic systems in the department using a Kinect. Coding the programs in LabVIEW meant it was much easier to folow the data flow and debug the programs than if a text-based programming language had been used. Using a compactRIO to run the LabVIEW code results in quicker and more accurate motion replication (particularly important when considering a physiotherapy application) than would possible with running the code directly from a PC.
The system was developed between November 2012 - May 2013.
