- Document History
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
On-board recursive state estimation for dead-reckoning in an autonomous truck with NI myRIO
Contact Information:
University: Kungliga Tekniska Högskolan (KTH).
Faculty address: School of Electrical Engineering Osquldas väg 10 100 44 Stockholm Sweden. +46 8 790 60 00
Team member: Francisco Martucci (2014)
Faculty adviser: Jonas Mårtensson. jonas1@kth.se
Submission language: English
Project Information
Title: On-board recursive state estimation for dead-reckoning in an autonomous truck with NI myRIO
Description: We are using NI myRIO as the basis of test bench that can be used to build very complex autonomous driving situations
Products: NI myRIO, LabVIEW and Vision Assistant.
The Challenge: Most of fully-autonomous vehicles are equipped with GPS devices in order to keep track of their exact location while driving towards any target destination. However, it is widely known that GPS systems are likely to fail under certain conditions, e.g., under large tunnels or during very bad weather conditions.
The Solution:
We present an Extended Kalman filter framework for dead-reckoning in autonomous trucks equipped with a gyroscope and simulated GPS, magnetometer and velocity rotary encoders. The EKF will fuse the measurements coming from the GPS and the gyroscope with a prediction that uses as a model a non-holonomic vehicle. In order to improve the estimation of the yaw angular position when a GPS outage is reported a new calibration method is tested and proven to effectively decrease the error while driving in GPS denied environments.
We quantitatively test our system on an on-board National Instruments embedded device that runs on-board of a 1:14 scaled Scania truck with some sensors and using as ground truth just for comparison purposes the information provided by a Motion Capture system. To this end, we implemented the EKF framework in myRIO, a Xilinx FPGA and dual-core ARM Cortex-A9 processor with a 1.6 GHz speed and two cores. The FPGA section is not widely used due to time constraints in the project, but it is widely recommended for future research, due to the high-speed advantages. Using this embedded device on-board of the truck let us control the vehicle in pose with a control loop of period, $T_s=80$ ms.
The video shows the performance for several testing situations while driving autonomously:
1st test) We start with the basic test of GPS data following fixed waypoints in a known map.
2nd test) Driving while doing trajectory control by using the information provided by the simulated camera, i.e., lane estimation.
3rd test) Driving while simulating short-term GPS outages
4th test) Driving while simulating long-term GPS outages
The performance results confirm the correctness of our framework under short-term GPS outages, during many driving loops. Additionally, during long-term outages the estimation works pretty well for one loop and it has a good performance for multiple loops due to the unavoidable sensor drifting.
Video:
Images:
- Scania model truck 1:14

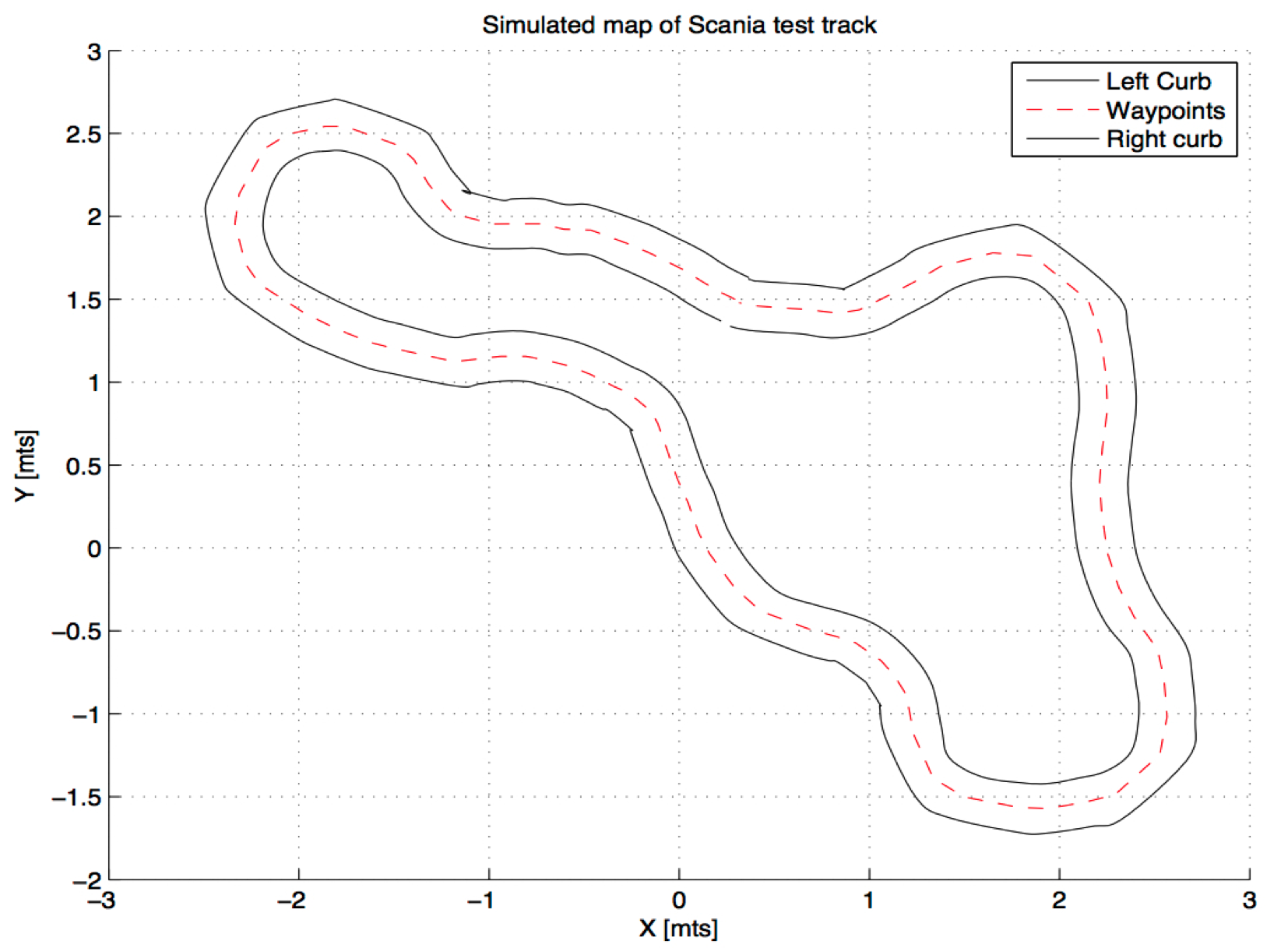
- Simulated map for driving
Nominate your professor:
Jonas Mårtensson
