- Document History
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
Contact Information
University: Loughborough University
Team Members (with year of graduation): Victoria Murtland (2014)
Project Supervisor: Paul Lepper
Email Address: vmurtland@gmail.com
Project Information
Title: Using Passive Acoustic Monitoring and the NI myRIO to Track Bottlenosed Dolphins
Description: Development of a prototype system to track bottlenosed dolphins using passive acoustic monitoring to understand the impact of man-made noise on their movement patterns.
Products: NI myRIO, LabVIEW
The Challenge:
Track the movement of bottlenosed dolphins, allowing a comparison to be formed between normal movement patterns and movement when exposed to man-made underwater noise.
The Solution:
Implementing a passive, non-invasive, acoustic monitoring system using a cubic array of hydrophones connected to a NI myRIO to capture the movement data of a bottlenosed dolphin. Data will be logged to file for a long-term record and using the on-board FPGA, processed in real-time to reduce the file size of the logged data and the time needed for post-processing.
Introduction
The impact of man-made underwater noise on marine mammals is a cause for concern for both the scientific and environmental community. Whilst organisations are required to monitor and report the levels of underwater noise that they produce, more needs to be understood about how noise exposure affects marine life both physically and physiologically.
To monitor this, Loughborough University has developed a long-term passive acoustic monitoring system, enabling comparisons to be formed between how a bottlenosed dolphin's standard movement varies when in the vicinity of this man-made stimuli.

Figure 1 - Movement of a Bottlenosed Dolphin through the Ocean
Tracking System
The technique of passive acoustic monitoring (PAM) uses several hydrophones, placed into the ocean at known distances from one another, to acquire the signals produced by the dolphins. For a bottlenosed dolphin, these signals are typically either a whistle for communication, or a click for navigation. PAM is advantageous as it is non-invasive to the dolphins, and allows data to be acquired continuously over a long-term period and with little dependency on ocean surface conditions. Once the signals have been acquired and processed, the dolphin can be located using the time difference between the signals being acquired at each hydrophone.
Signal Processing
Cross-correlation, a technique used in signal processing, is used to identify the time delay between signals. It works by taking a number of samples from each signal and moves one signal along the time-axis to determine the point at which the samples align.
When an echolocation click is emitted by a dolphin the signals are received by two hydrophones which will theoretically only differ in arrival time due to propagation delays and amplitude due to increased propagation loss. Once the input signals had been normalised, cross-correlation was implemented in LabVIEW through a pre-built, easy to use function block, which outputted a delay between the signals in terms of the number of samples. As the sample rate of the system was known, the sample delay could then be converted into a time delay, known as the time difference of arrival. This difference, combined with the known distance between each receiver was used to identify the bearing upon which the bottlenosed dolphin lay. To translate the bearing into co-ordinates of the dolphin's location, cross-correlation must be performed at least three times, using pairs of receivers in three planes.

Figure 2 - Synthesised echolocation click emitted (shown on Channel 1 - bottom) and received decreased in amplitude after a small delay on Channel 2 (top), followed by reflections.
Choice of Hardware
The system requirements denoted that the data acquisition platform needed to be capable of acquiring high frequency data, running without additional user input and automatically logging data to file. Although a number of technologies were considered, including the Raspberry Pi and the Arduino Uno, the myRIO produced by National Instruments was identified as the most favourable platform. This was due to its high sample rate (500 kilo-samples per second aggregate), ability to perform signal processing on-board, and integrated Wi-Fi capability which enabled the innovative feature of in-situ monitoring of acquired data.
myRIO is an embedded hardware device, which features a Linux real-time operating system and an on-board Xilinx field-programmable gate array (FPGA). This means that the device is highly customisable, with the ability to create deterministic, time-critical applications to acquire data and perform real-time processing. Programming in LabVIEW, the decision was made to use both the real-time host and to customise the FPGA personality to achieve optimised performance allowing access to the analogue input channels at their maximum rate.
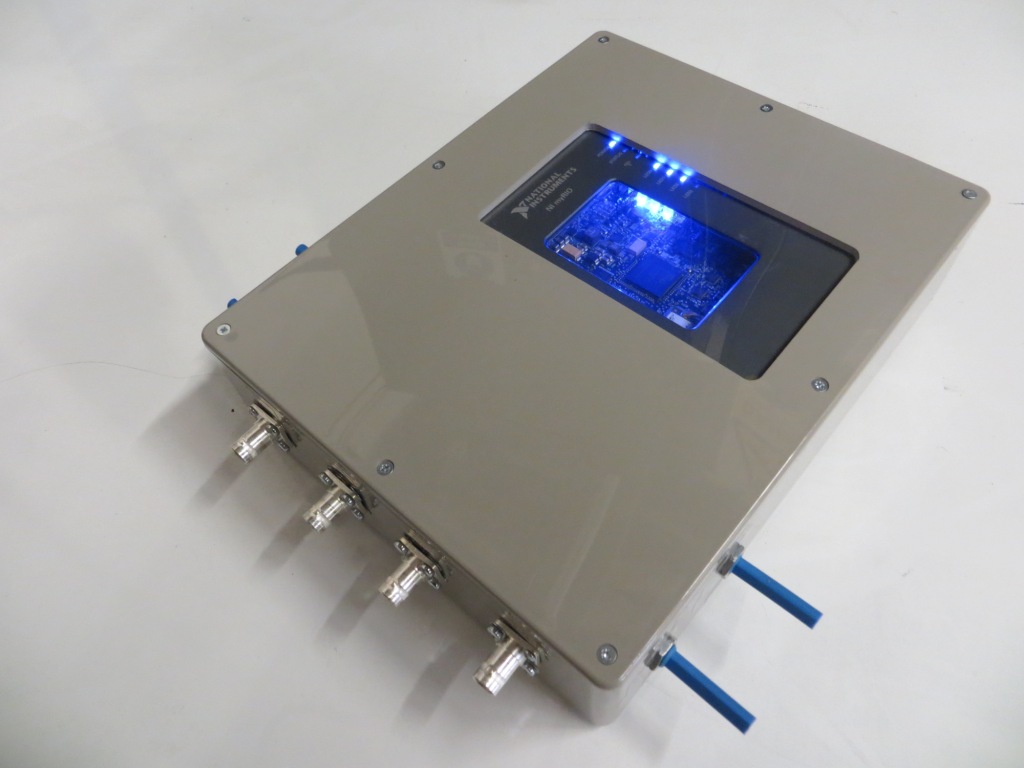 Figure 3 - Acquisition System containing a myRIO, amplification circuit and batteries within a water resistant enclosure.
Figure 3 - Acquisition System containing a myRIO, amplification circuit and batteries within a water resistant enclosure.
Data Storage
The myRIO storage capacity was increased by interfacing it with a 1 GB external hard drive via the USB port. This enabled the system to log data on four channels every 200 ms for over six weeks. One channel was used for each of the hydrophones, with the fast sample rate selected to ensure that the high frequency signals could be read and cross-correlated with no significant loss of data. Enabling the system to log data for 6 weeks was important to provide a large enough sample to identify movement trends.
Wi-Fi Transmission of Data
The built-in Wi-Fi capability of the myRIO was used to monitor the data being acquired by the system in real-time to ensure that the system was performing as expected. This facility allows an operator in a vessel situated near to the rig to view the live data via a laptop. The myRIO allowed this functionality to be implemented with ease, using the on-board wireless capacity of the device.
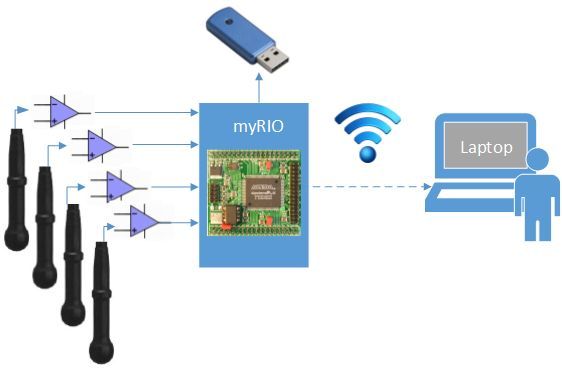
Figure 4 - Simplistic System Architecture - Signals from four hydrophones are received and amplified before passing into the myRIO for signal processing. Data is then saved to the external memory for long-term storage, and can be passed by Wi-Fi to a nearby operator for real-time monitoring.
Conclusion
Combining the power of National Instruments hardware and software, the myRIO and LabVIEW, allowed for a prototype passive acoustic monitoring system to be developed. LabVIEW provided a fast and easy to use development environment, significantly reducing the software development time. The myRIO was an integral part of the system as it allowed high frequency data to be acquired, processed and saved to file. The data could then be transmitted wirelessly all on-board the single device, hence reducing development time and cost. The next phase of the project is to improve the ruggedness of the system, housing it in a surface buoy and using solar panels to increase the battery life of the system. With further development this system could be used in the marine industry and help to protect the physical and physiologic welfare of bottlenosed dolphins in the wild for years to come.
Extra Info
- Level of completion: Alpha - Prototype system
- Time to build: 9 months including research, 4 months practical/software development
Attach Poster
Nominate Your Professor
Professor nominated is Paul Lepper who is an expert in the underwater acoustics field and has been a user of National Instruments products for many years. In recent years, his patient, supportive and enthusiastic teaching of LabVIEW basics to 2nd year systems students and 3rd year robotics project students has been very successful in helping to promote the use of LabVIEW throughout the student community within Loughborough University's School of Electronic, Electrical & Systems Engineering.
Student
