- Document History
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
Contact Information
University: Cardiff University
Team Members (with year of graduation): Chris Bentley (2014); Marist Fernando (2014);
Edward Lewell (2014); Peter Mercer (2014);
Beth Oates (2014); Rowan Phillips (2014);
Michael Rees (2014); Nic Roberts (2014);
Matthew Trott (2014)
Project Supervisor: Steve Watts, Dr Rhys Pullin, Dr Alastair Clarke
Email Address: trottmpq@gmail.com
Project Information
Title: myRIO powered UAV Submarine
Description: Design and create an unmanned autonomous submarine for the purpose of
marine exploration and mapping.
Products: NI myRIO-1900
LabVIEW 2013
LabVIEW Real-Time Module
LabVIEW for myRIO Module
LabVIEW FPGA Module
LabVIEW FPGA Xilinx Tools
LabVIEW Vision Acquisition Software
LabVIEW PID control and Fuzzy Logic Toolkit
Pololu High-Power Motor Controller 18v15
Seabotix BTD150
Sparkfun ITG-3200 Gyroscope
Sparkfunb HMG-6352 Compass
Logitech Web Camera
Solidworks
The Challenge:
The Aim of the project was to create a self contained submarine, that could be
controlled via a wired tether, with a view to convert the submarine to an
autonomous vehicle in future iterations. This would be then used by the marine
science department of the university in order to map and characterise the
river and ocean floor.
To do this the submarine needed to be able to run off its own power supply
and be able to give a user visual feedback of any measurements it made. The
submarine needed to ensure that it was not susceptible to any drifting that may
occur due to currents and be able to hold its stationary position if no direction
command is given.
The Solution:
The Submarine was controlled via an on shore host device (Laptop) where the
user could input directional vectors and receive visual feedback from the web
camera on the submarine. The user could then avoid any obstacles that may
have been encountered. This was achieved using LabVIEW Network streams
to send data to and from the submarine and using the IMAQdx driver set to
view the image data from the webcam.
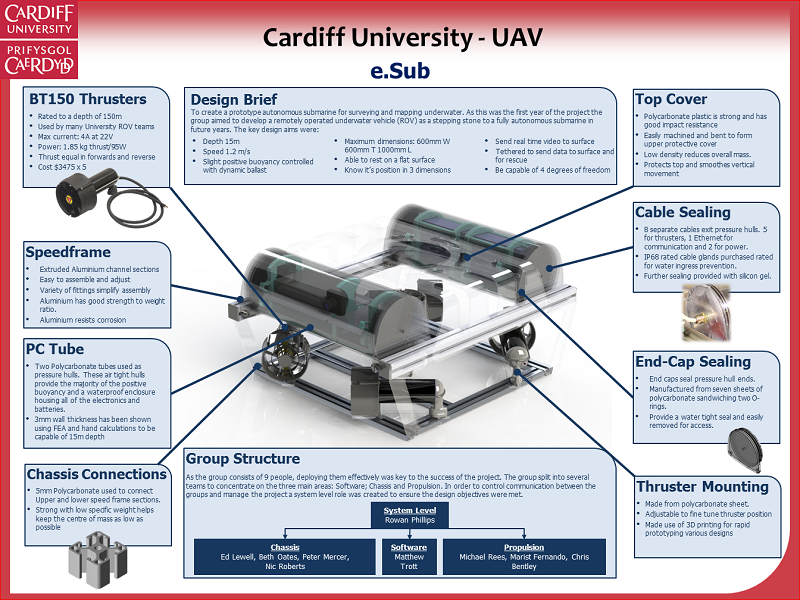
The Submarine itself was designed from scratch for this year of the project by the
team of mechanical students. The design brief was to create a neutrally buoyant
chassis and hull that could contain all the electrical components and battery
power supply. This was achieved through multiple design iterations using the
CAD software Solidworks and then built to this design.

In order to reduce the number of moving parts on the submarine and hence
reducing the waterproofing requirement of the project, it was decided that a
vector thrusting arrangement would be used. This meant having 4 thrusters
arranged at 45 degrees to the orientation of the submarine and a single
central vertical thruster. This gives the submarine 4 degrees of freedom with
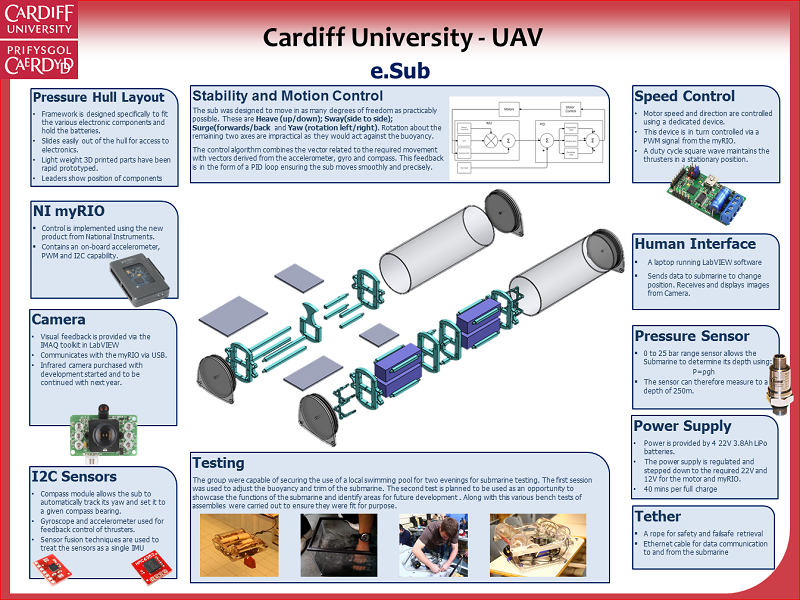
complete movement in the XY axis and depth control in the Z axis. To ensure
that the thrusters moved the submarine in the desired direction, feedback
sensors were used to act as process variables in PID control loops within the
LabVIEW Control code on the myRIO. This ensured that any imbalance in
the thrusters due to water flow would be accounted for.

The sensors used were the onboard accelerometer on the myRIO in
conjunction with a gyroscope sensor to create feedback for any movement in
the XY plane. A compass sensor was also used to gain an indication of the
orientation of the submarine and a pressure sensor was used to gain
knowledge of the depth that the vehicle had reached.
LabVIEW and the myRIO enabled the project to achieve the goals that were
set out due to its ease of use. The myRIO tool set made communication to
the sensors over I2C simple and the analogue measurements of the pressure
gauge straightforward. Using the new Network stream functionality in LabVIEW
meant that setting up a high bandwidth connection to the submarine took just
a few minutes rather than the confusion of configuring TCP/IP settings that would
normally be used.
All work on the project was conducted within the academic year starting
September 2013 and finishing in April 2014.
Attach Poster
Cardiff e.Sub Poster 1
Cardiff e.Sub Poster 2
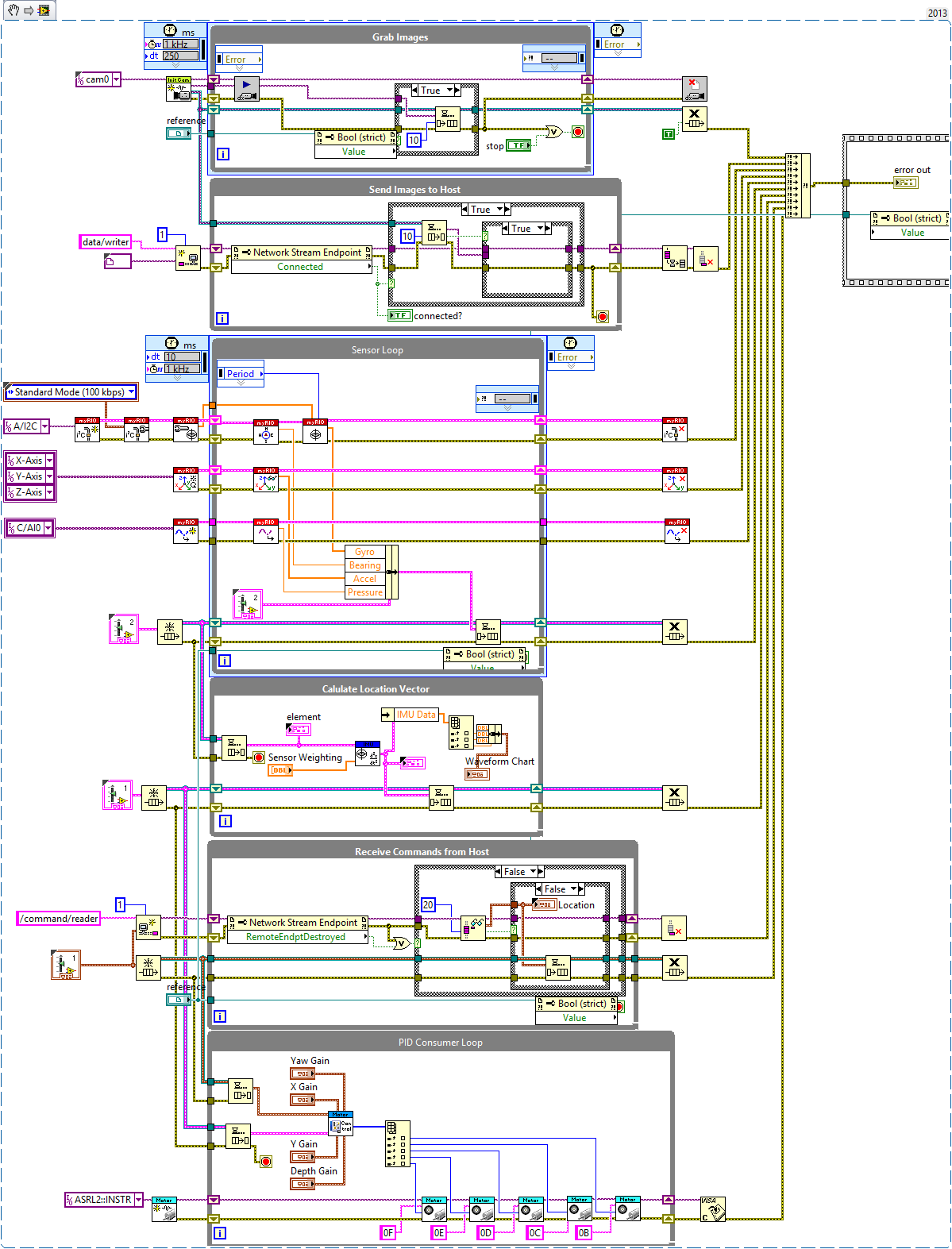
Submarine Main Vi
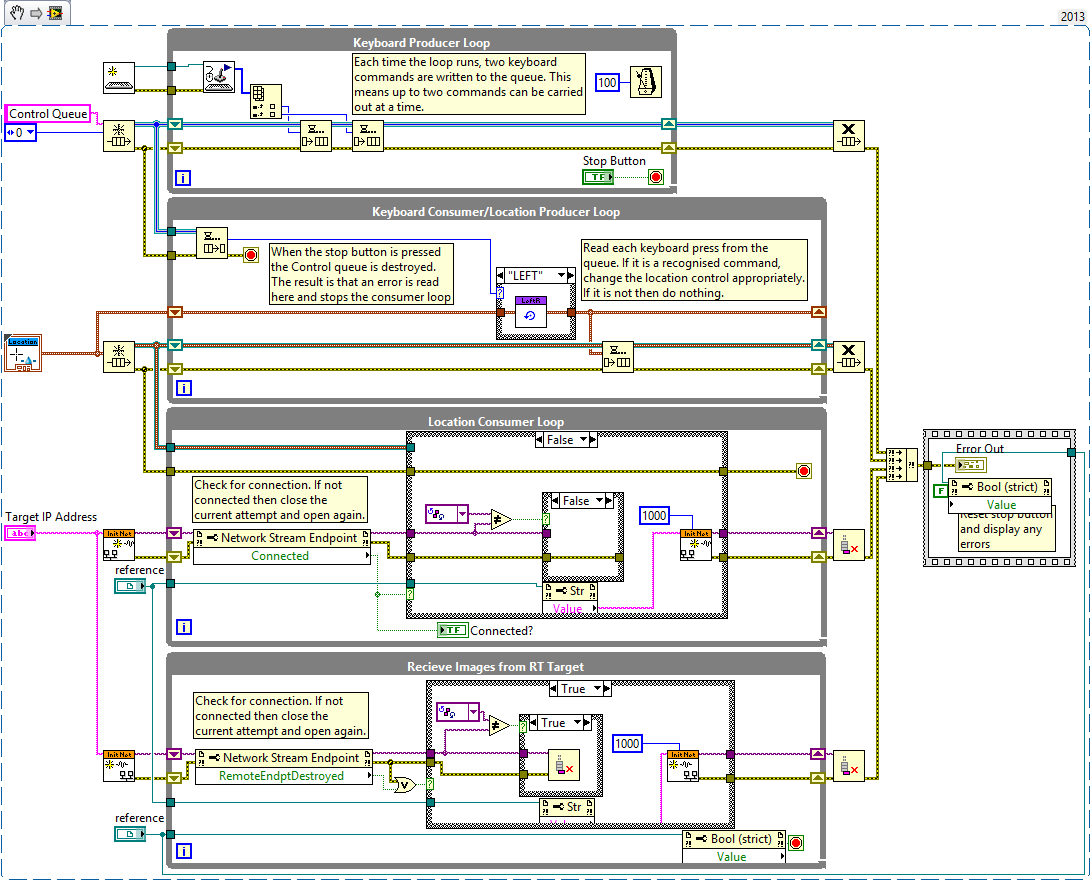
Host Main Vi
