- Document History
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
Contact Information
University: Tsinghua University
Team Members (with year of graduation): LIU Youda, LIN Kuicheng, DAI Yixiang, TAN Yuqi
Faculty Advisers: Prof. WANG Xue
Email Address: wangxue@mail.tsinghua.edu.cn; liu-yd11@mails.tsinghua.edu.cn; linkc10@mails.tsinghua.edu.cn; daiyx12@mails.tsinghua.edu.cn; tan-yq10@mails.tsinghua.edu.cn
Submission Language: English
Project Information
Title: Naughty Ball – Remote Self-adaptive Visual Sensing and Fuzzy Control in Comprehensive Environment
Description: Naught ball project is a platform for helping students to get familiar with web-enable vision fuzzy control schemes. With numerous challenges caused by uncertainties, students should set reasonable parameters and fuzzy rules in order to adjust this naught ball system to different operating environment. In addition, this project can also be generalized in the application of industrial remote fuzzy control scheme design.The project is a remote naughty ball self-adaptive visual sensing and fuzzy control system based on NI Smart Camera 1742 and NI compactRIO 9074.
Products:
Hardware:
cRIO-9074
NI 9401 Module
Smart camera 1742
Software:
NI LabVIEW 2012 Academic Standard Suite
NI LabVIEW IMAQ Vision Acquisition System
LabVIEW Real-Time Module
Other Hardware and software:
An irregular ball
A plastic tube
A keyboard vacuum
A simple motor driver board
A DC Power Supply
Software:
MATLAB Fuzzy Control toolbox
The Challenge:
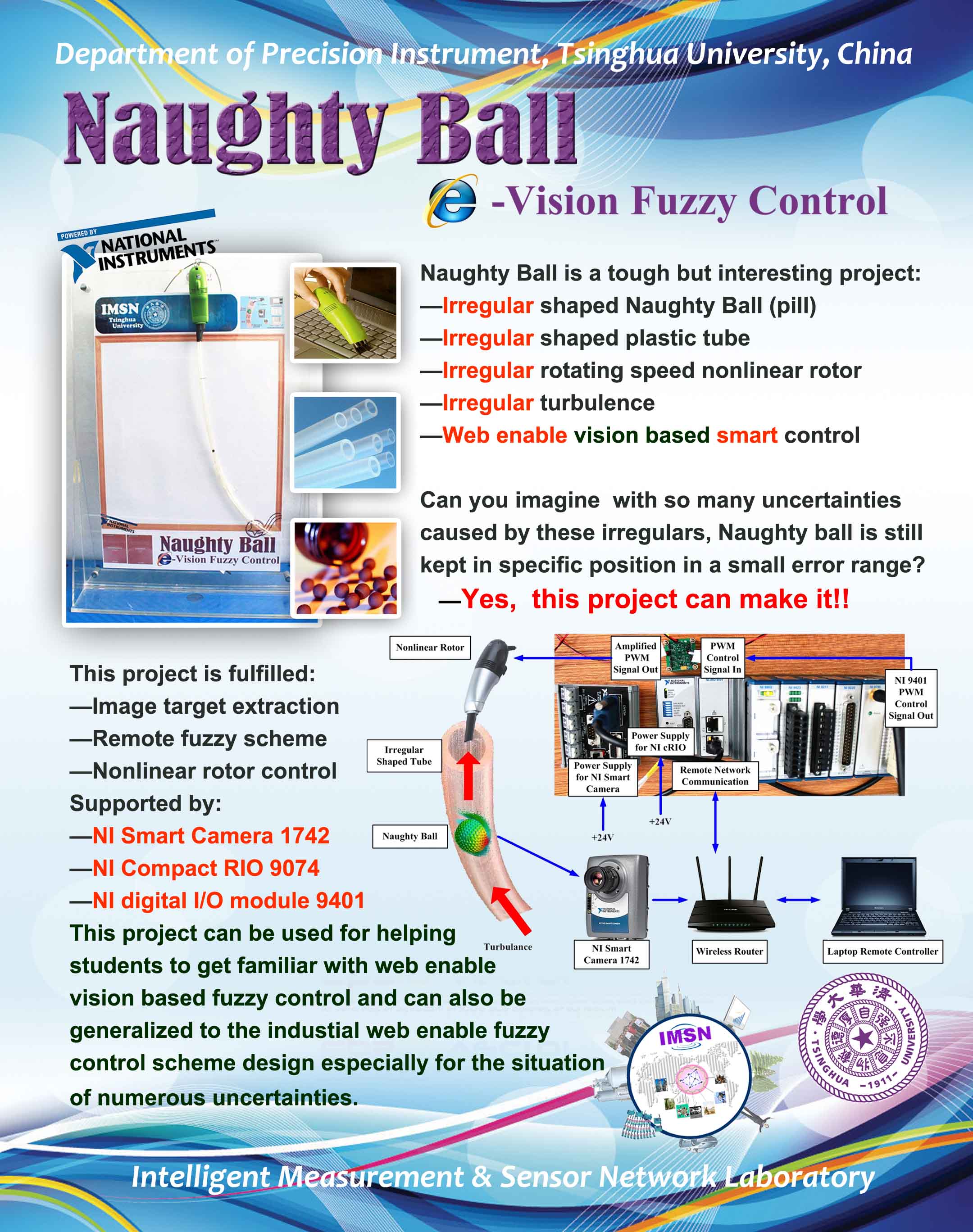
Naughty ball is a tough but interesting project in which a fuzzy control scheme is designed for controlling an irregular shaped naughty ball (pill) in an irregular plastic tube using a nonlinear rotor whose rotating speed is also irregular. Can you imagine that with so many uncertainties caused by these irregulars, the naughty ball is still kept in specific position in a small error range? Yes, this project can make it!
Naught ball project is a platform for helping students to get familiar with web-enable vision fuzzy control schemes. With numerous challenges caused by uncertainties, students should set reasonable parameters and fuzzy rules in order to adjust this naught ball system to different operating environment. In addition, this project can also be generalized in the application of industrial remote fuzzy control scheme design.
The nonlinear rotor with an irregular rotating speed creates turbulence in the tube. Therefore, the force situation of irregular shaped naughty ball is unstable. In addition, the remote web enable environment adds to the difficulties and time delay of fuzzy control scheme. This project combines the fuzzy control theory and virtual instrument technology supported by National Instruments to develop a reliable framework for naughty ball controlling. This framework can be rapidly generalized to the control scheme design in industry and daily life especially under the circumstances of numerous uncertainties.
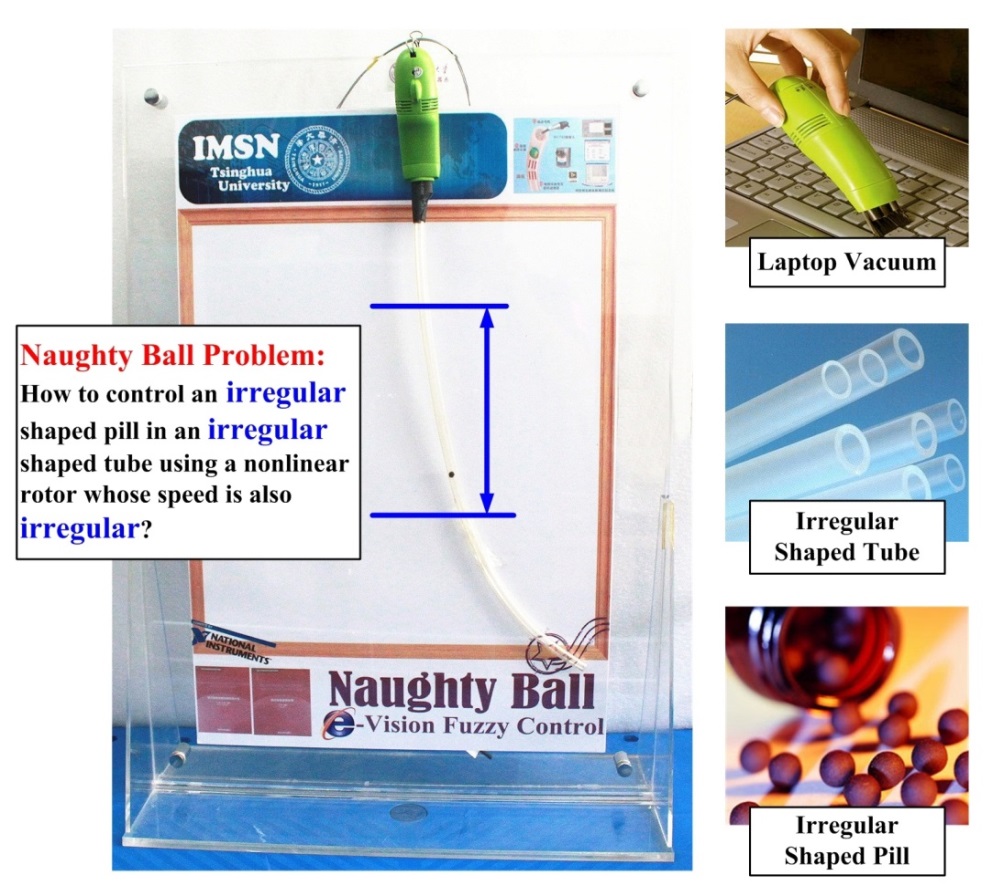
Fig.1 Description of the Naughty Ball problem
The Solution:
This project is implemented in remote manner with WLAN and could be divided into three steps as shown in Fig.2:
(1) Getting the ball position. NI Smart Camera 1742 is used to acquire the image, in which the irregular ball and plastic tube can be seen. And then, the image is transmitted with Datasocket to remote laptop to exact the motion information (position and velocity) of the ball with image processing technology.
(2) Control decision with fuzzy logic. Based on motion information and preinstall fuzzy logic, a control decision on pulse width adjustment is made. The naughty ball remote fuzzy control interface based on LabVIEW is displayed in Fig.3.
(3) Controlling the rotor. The NI Compact RIO 9074 with digital I/O module 9401 generated adjusted PWM waveform according to control decision to control the speed of the rotor, which will drive the irregular ball up or down to suspend in the tube.
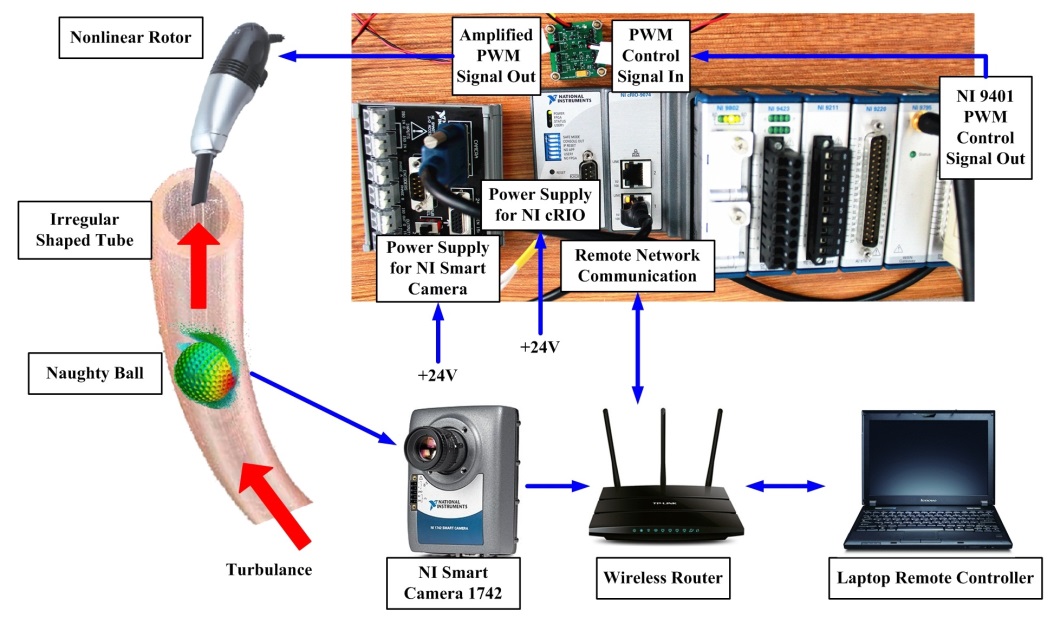
Fig.2 Framework of Naughty Ball Remote Self-adaptive Visual Sensing and Fuzzy Control in Comprehensive Environment
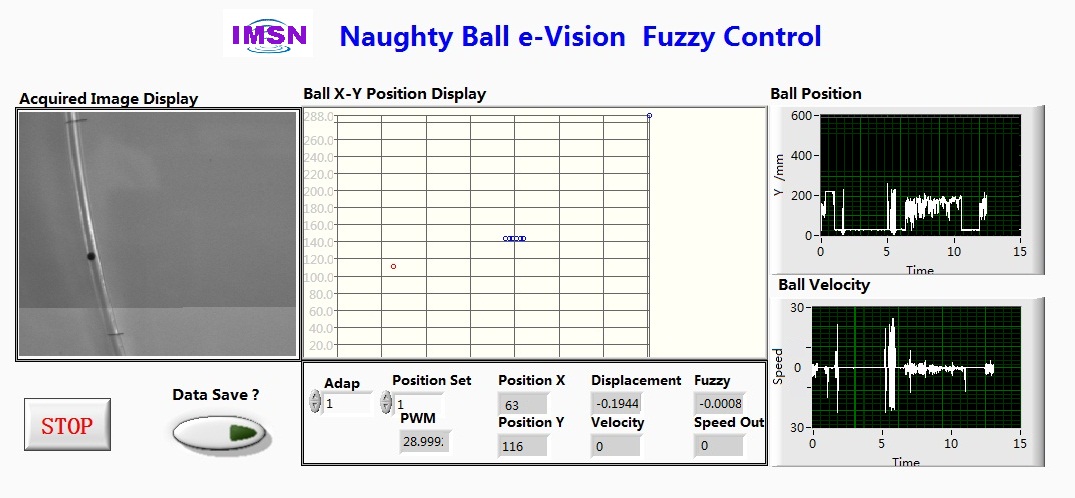
Fig.3 Naughty Ball Remote Fuzzy Control Interface
NI Smart Camera is a combination of high-quality industrial CCD and a powerful processor. It can be used in most machine vision applications with NI Image Motion and Vision Module. This project use NI Smart Camera 1742 to acquire the image sequences to get the motion information rapidly.
NI CompactRIO is an embedded controller with enhanced performance, openness, flexibility and connectivity. It can be expanded to realize a variety of functions with different modules. In this project, CompactRIO is combined with NI 9401 digital I/O module to control the motion of nonlinear rotor.
LabVIEW is graphic programming software which is a perfect choice for development of measurement and control systems. In this project, motion information of irregular shaped ball is extracted with a smart camera and subsequent image processing in LabVIEW. Then fuzzy control codes basing on matlab are embedded in LabVIEW to realize the adaptive adjustment of the irregular shaped ball. Smart camera and compactRIO are combined internally to realize the remote adaptive control of irregular shaped ball.
Attach Poster
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
The idea is fantasitic. It is a difficult task to stablize the inregular ball in a certain localization.
