Introduction
This hands-on tutorial is suitable for controls, mechatronics, and robotics projects. The floating point microprocessor on CompactRIO or Single-Board RIO is programmed with the LabVIEW Control Design and Simulation Module and LabVIEW Real-Time Module. The example in the tutorial is very simple and uses the LabVIEW Control Design and Simulation Module to create a sine wave with precise timing. The sine wave is sent to an analog output channel that is "wrapped back" to an analog input channel. In addition, the CompactRIO or Single-Board RIO device may be interfaced to a Quanser www.quanser.com QET DC Motor trainer to implement speed control. This tutorial can also be used with a PCI or PXI plug-in RIO device.
Steps to Complete
Set up a CompactRIO with an analog output module and an analog input module. This demo will also work with a Single-Board RIO with onboard analog output and analog input channels. Make sure that the CompactRIO and Single-Board RIO have the required LabVIEW Control Design and Simulation Module code installed on the floating point processor using the Measurement and Automation Explorer (MAX).
A zip file is attached with a step-by-step tutorial to create a LabVIEW project and LabVIEW 2009 VIs. The VIs are included for reference but are not required for the tutorial. A related lab exercise from NC State is included which shows the user how to build a PID controller for the QET DC Motor using the LabVIEW Control Design and Simulation Module, which is now included as part of LabVIEW Professional.
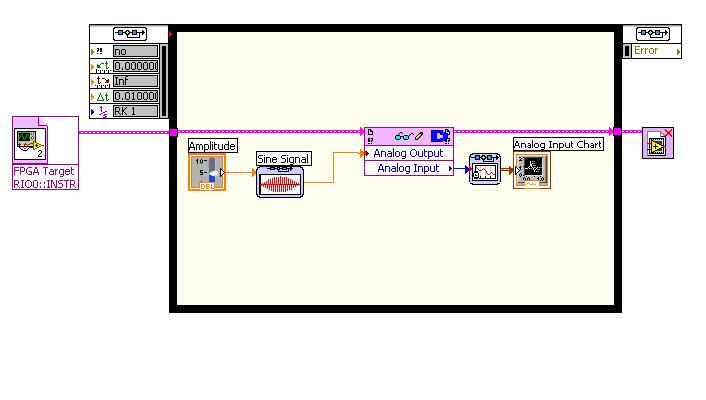
Screenshots of LabVIEW Control Design and Simulation Module Code on cRIO or sbRIO

How to Purchase the QET DC Motor
Click here to purchase the QET DC Motor
Authors:
Jeannie Falcon, Ph.D. (NI Principal Engineer, Control and Simulation) wrote the original tutorial and Eric Dean (NI Academic Field Engineer) created the PID lab exercise.
