- Document History
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
Contact Information
University: Korea Advanced Institute of Science and Technology
Team Members (with year of graduation): Unghui Lee, Jiwon Oh, Seunghak Shin, Inwook Shim, Jongwon Choi, Youngseop Jung, Kibaek Park, Minhyun Kim, Jiwon Jung
Faculty Advisers: Hyunchul Shim, Inso Kweon, Seibum Choi
Email Address: lamer0712@kaist.ac.kr
Submission Language: English
Project Information
Title: the Self-driving Car, EureCar and EureCar Turbo (2nd generation)
Description: EureCar is a Self-driving car that can drives itself along the pre-planned path while avoiding obstacles and obeying various traffic laws. We have been developing 2 Self-driving cars, EureCar and EureCar Turbo. EureCar (our first Self-driving car) has high precision positioning system, 7 laser scanner and 4 camera has been developing for 2 years. EureCar Turbo takes 6 months of development time for the same performance as EureCar with less and low-cost sensors. We could curtail the development period from 2 years to 6 months by using previous software developed for EureCar. Especially, it took only 2 months for developing additional software for EureCar Turbo except the period of hardware implementation and remodeling.
Eurecar, Kaist Self-Driving CAR |
Eurecar turbo, Kaist Self-Driving CAR |


Products:
NI Hardware for the EureCar
NI cRIO-9024
NI cRIO-9114
NI 9403
NI 9853
NI 9201
NI 9401
NI 9870
NI Hardware for the EureCar Turbo
NI cRIO-9024
NI cRIO-9113
NI 9862
NI 9401
NI 9870
NI Software
Labview 2012
LabVIEW FPGA Module 2012
LabVIEW Real-Time Module 2012
PID and Fuzzy Logic Toolkit
Other Hardware for the EureCar
2 GPS Novatel OEMV-2 (DGPS)
1 IMU Inertial Science ISIS-IMU
2 LIDAR HOKUYO UTM-30LX
2 LIDAR SICK LMS 151
2 LIDAR SICK LMS 291
1 LIDAR ibeo LUX
4 Camera Point Grey
3x PC Desktop with Windows 7
Gas and Brake pedal control motor and driver
Other Hardware for the EureCar Turbo
2 GPS Ublox EVK-6T
1 LIDAR Velodyne HDL-32E
5 Camera Point Grey
3x PC Desktop with Windows 7
Gas and Brake pedal control motor and driver
The Challenge:
Recently, there have been significant advances in self-driving cars, which will play a key role in future intelligent transportation system. In order for these cars to be successfully deployed in real roads, they must be able to drive by themselves along collision-free paths while obeying various traffic laws. In contrast to many existing approaches that use pre-built environment maps of roads and traffic signals, we propose system using a unified map contains not only the information on real obstacles nearby but also traffic signs and pedestrians as virtual obstacles. Using this map, the path planner can efficiently find paths free from collisions while obeying traffic laws.
Necessary driving velocity and a steering angle calculated from path planner are sent to CompactRIO and going through safety system such as E-STOP. Finally, the outputs from the safety system control the vehicle through Gas and Brake pedal control motor driver. This system is implemented on commercial vehicles and EureCar is developed earlier than any other vehicles. Even though the hardware is changed significantly, the development period is shortened by using previously developed software related to path planning, vehicle control and safety.
The Solution:
Overall system structure is shown in the diagram below. EureCar and EureCar Turbo consist of almost the same system except the type of sensors and configuration of sensors.
Our system for autonomous driving has a modular architecture using UDP (User Datagram Protocol) Ethernet network. All modules are integrated via UDP multicast protocol and NI Publish and Subscribe Protocol (NI-PSP). NI-PSP is used for communication between the path planner and the CompactRio. For the others, UDP multicast is used as the main network resource.
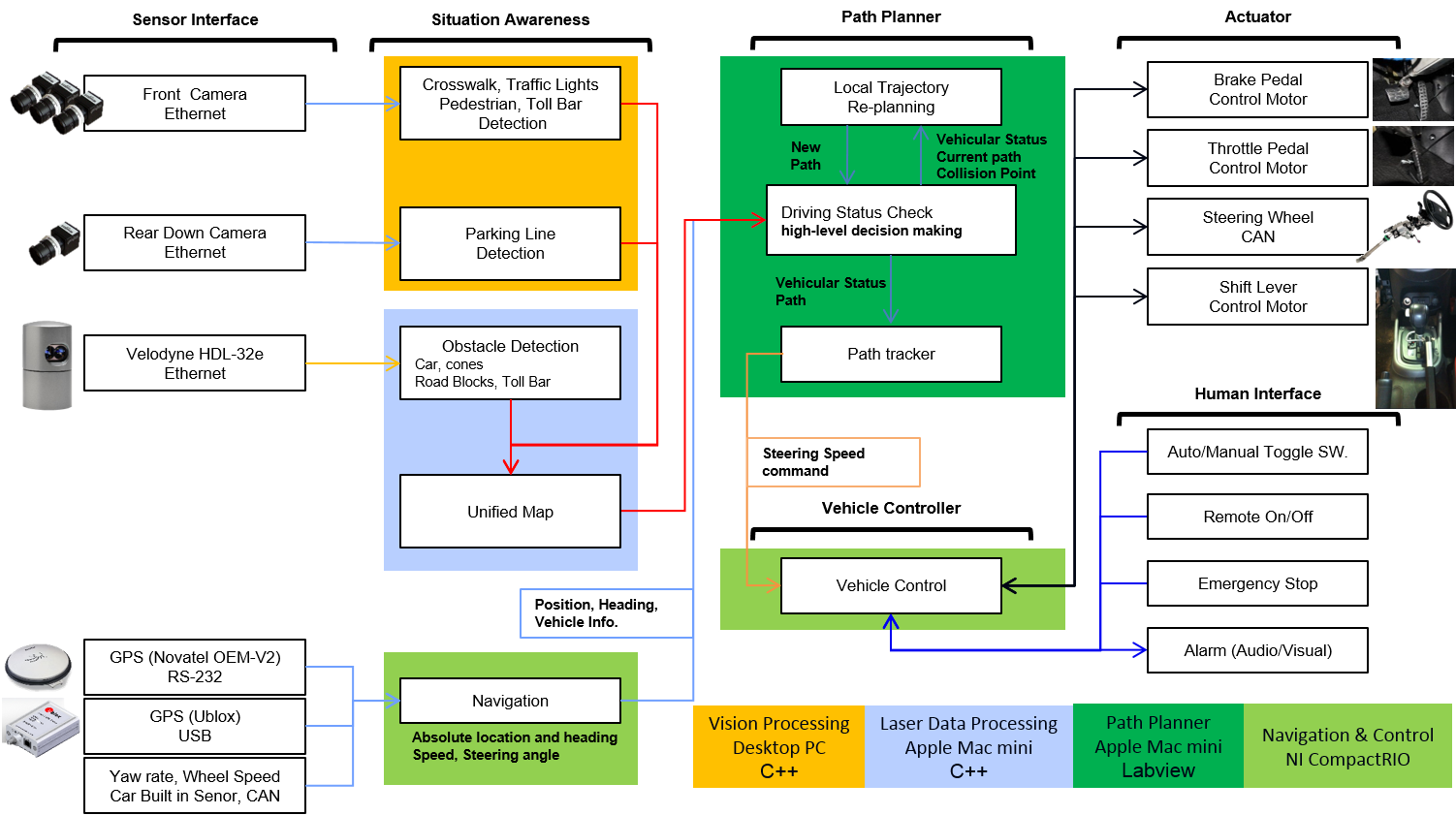
System configuration
This system is divided into following the 3 parts
1. Navigation and Controller : CompactRIO
The vehicle is controlled by CompactRIO and hardware and software are designed so that E-STOP switch and a safety driver can stop the vehicle whenever it is in an emergency. For the software, safety and reliability are achieved using the previous system configuration qualified on EureCar for 2 years. A qualified controller is adopted directly to control brake and gas throttle by taking advantage of PID and Fuzzy Toolkit.
Global positioning is calculated through Real Time Module in real time to minimize a time error and consists of an extended Kalman filter receiving vehicle velocity and yaw rate from low-cost GPS and ECU of vehicle.
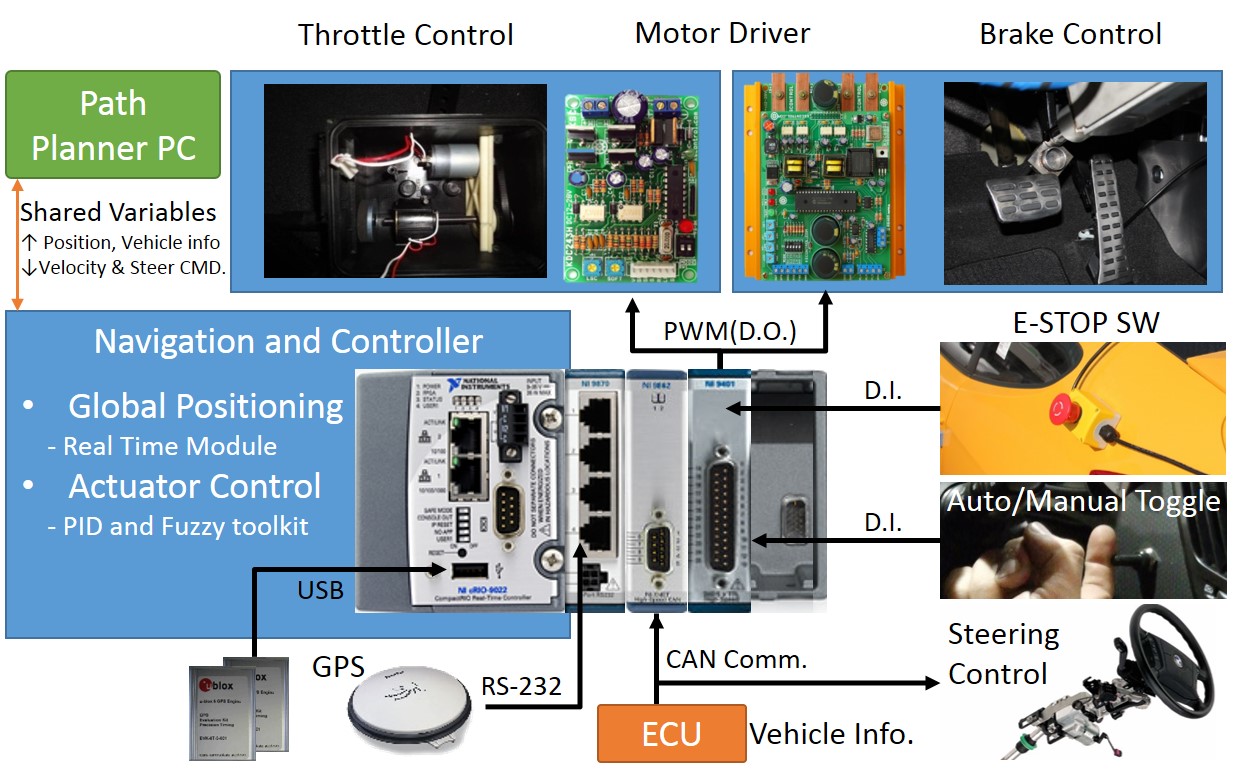
Navigation and Control System : CompactRIO
2 . Sensing
We present a unified map representation which includes various information for self-driving in real environments. The self-driving vehicles have to detect obstacles which obstruct the path and also recognize unpredictable events such as pedestrian crossings and changing traffic lights. For detecting and recognizing all these cases, many detection algorithms are required. However, it is also difficult to generate paths considering all kinds of results obtained from various detection algorithms.
In order to efficiently handle all such cases, we propose to generate a local map by converting the results from detectors into obstacles, which we call a unified map can be categorized as ”real” and ”imaginary”. For reacting to various situations such as traffic signal, the detected events are additionally assigned into the map as imaginary obstacles shown in figure. The unified map generates imaginary obstacles which block around a vehicle for stopping. The unified map generates imaginary obstacles which block around a vehicle for stopping the path tracking when the vehicle should stop, or a detouring path using imaginary obstacles when the vehicle has to make a detour.
3. Path Planner PC : Labview
The path planner module consists of the path tracker and planner. The path tracker gives the steering wheel input to the ECU built in the vehicle. The tracker follows the path by calculating feedback errors between an imaginary position on a path, the current position, and the pose from the navigation system. A path described by a cubic polynomial is more easily modified and also manageable.
The planner generates a collision free path based on the unified map information. The path modification algorithm is triggered when a path and obstacles in the unified map intersects. Our path collision detector uses a continuous path representation with cubic function for detecting collision with obstacles and modifying the path.
All algorithms of the path planner are programmed on Labview. The program is designed to command and monitor vehicle status, sensor data, GPS data and the progress of mission at a glance.
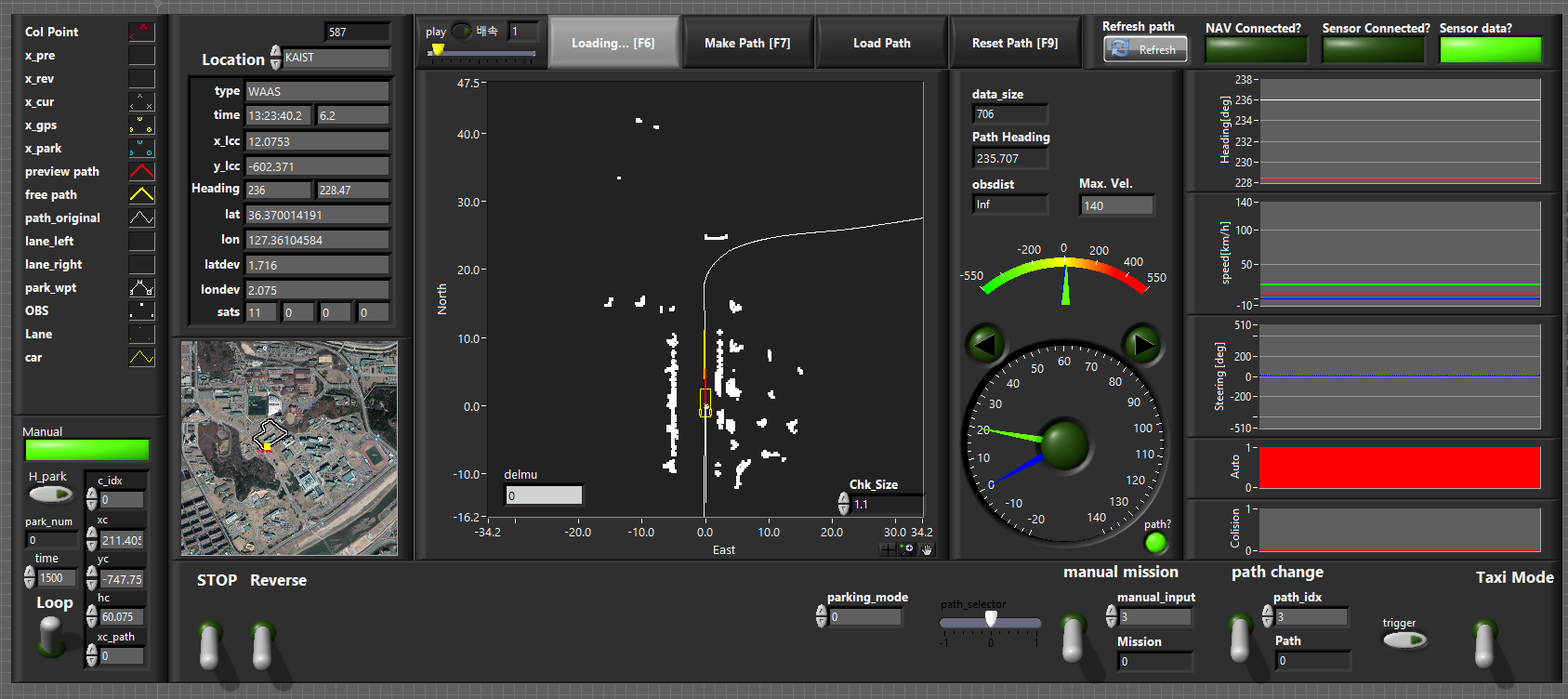
Path Planner GUI
Results of experiments
The results of experiments are shown in the driving videos at 2012 Hyundai Autonomous Ground Vehicle Competition and at the KAIST campus which provides unstable GPS receiving.
2012 Hyundai Autonomous Ground Vehicle Competition
2014 EureCar turbo @ KAIST Campus
Futuer Work
EureCar Turbo is aiming to drive safely to a destination keeping the raffic laws in downtown environment which disables receiving GPS signals and generates multipath often. To achieve this goal, more robust GPS positioning and algorithms dealing with various surroundings fast and safe are under development. Also, it is under development so that the vehicle can drive anywhere without assigning path in advance by generating a path from OpenStreetMap when a user set a destination. Furthermore, driving safely at the average speed of 110km/h not only in downtown but also on the highway is under development.
* for the replay the log data, Extract the code at c:\ and open c:\autocarnav3\autonomous.lvproj
open commander.vi -> Run the vi -> click the data load and load path
* you need a matlab
you can download the code bleow link (need password, contact lamer0712@kaist.ac.kr)
http://unmanned.kaist.ac.kr/eurecar/autocarnav3.zip
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
안녕하세요,
수고하셨습니다.
감사합니다.
한국내쇼날인스트루먼트 드림.
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
발표 잘 봤습니다.
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Hello, the link for the sample code doesnt work. Can you please share.
Many thanks
