- Document History
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
CAR PARKING MONITORING SYSTEM BASED ON A WIRELESS SENSOR NETWORK for Student Design Competition 2013 (UNIVERSITY OF PLYMOUTH, UK)
Contact Information
University: University of Plymouth
Team Members (with year of graduation): Darren Bearne (Graduation in 2014 -On MEng Electrical & Electronic Engineering Degree)
Faculty Advisers: Dr Mohammed Zaki Ahmed (Project Supervisor), Dr Paul Davey (Secondary Marker)
Email Address: Darren.Bearne@Students.Plymouth.ac.uk
Submission Language English
Project Information
Title: Car Parking Monitoring System Based on a Wireless Sensor Network
Description:
System to monitor the occupancy of vehicles within car park or roadside environments, each parking space features a wireless vehicle detection sensor which feeds back occupancy information to the NI Labview GUI Program, this displays the vehicle occupancy in real time and stores data for statistical analysis. This can then be uploaded to an online server for external access for on the move parking and for car park owner information to improve the efficiency of the car park.
Products
NI Labview with VISA Driver, NI MyDAQ device, NI ELVISmx software
8051 Teaching and Development Board, Arduino Uno, Arduino IDE, Honeywell HMC5883L Anisotropic Magnetoresistive Sensor, XBEE Pro 868Mhz RF modules, Texas Instruments MSP430 Launchpad, Freescale MAG3110 Magnetometer Sensor, Ciseco XRF 868Mhz RF modules, IAR Embedded Workbench
The Challenge
With the increasing levels of vehicles on the roads, consumers are finding it harder to find parking; this leads to congestion particularly in our urban areas. Modern technology is required to help reduce the levels of traffic, this will keep vehicles moving to help reduce fuel consumption, saving consumers money and helping the environment. It is personally felt that the majority of existing car parks and street parking spaces have very little technology; this does little to help the consumer and provides little feedback to the site owners.
The aim of the project was to develop a car parking monitoring system, with a view to designing a suitable prototype and with multiple vehicle detection sensors; the final product was desired to provide simple installation, operation and high reliability, whilst ensuring low cost design. The system will be aimed to be a parking solution ideal for council or private car parks as well as roadside spaces for maximum
The Solution
The solution was in the form of a vehicle detection sensor which was to be installed within each parking space, installed within the surface of the tarmac. This allows the system to be installed in multistorey and open car parks, as well as roadside spaces. Each sensor is desired to be low cost, accurate, reliable and consume low power consumption. The low power consumption was seen as a large factor to ensure large battery life from a low cost battery.
The project has developed over an approximate nine month period, with stage one being the initial research into the system, during this period Labview was used to create a GUI of a car park interface with on screen buttons to simulate a byte of data to control the occupancy of the on screen spaces, which are on screen boolean indicators (green = empty, red = occupied). this was further adapted to read in from 8 digital input pins on a NI MyDAQ device, the use of single parity checking was used to allow error detection on the data read by the Labview system. This was further enhanced by implementing the NI VISA driver with an 8051 microcontroller communicating the data in through the computer RS232 Serial port. The system was then altered to store the current occupancy status of the parking spaces as a spreadsheet file.
Research was carried out into the most feasible sensor to ensure low power, accuracy and reliability. This was chosen to be a magnetometer based sensor, with the presence of a vehicle effecting the earths natural magnetic field. To allow the effect of a vehicle on the sensor, the raw three axis data was required to be analysed, it was input into the Labview system and graphed in real time through an Arduino Uno board and USB connection, this was then enhanced by transmission of data through XRF wireless modules, these connect to the computer through a USB adapter appearing as a USB serial port on the computer.
The data was then analysed and algorithms programmed within the Labview software to make the most accurate detection method, the raw data from vehicle testing was stored as a spreadsheet file, this can then be input back into the system to modify the algorithm for more accuracy testing.
The final stage was then to reduce the power consumption of the system with the final design, further research was carried out for this stage of the project. The final sensor was to be controlled by a Texas Instruments MSP430 device due to its low power specifications, this was achieved with a TI Launchpad development board, with a breakout board made on PCB to contain the wireless XRF module, battery and the magnetometer sensor, which has been chosen as a Freescale MAG3110 due to lower cost and suitability for the project. The vehicle detction algorithm was implemented onto the TI MSP430 device written in C programming, this reduces the wireless communication to inform the Labview software of occupancy changes from the sensor and at a set interval (every hour), as opposed to all the raw data previously. The Labview system then alters the on screen spaces on the GUI in real time storing the data for statistical analysis. By sending data at a set interval, a faulty space can be identified where communication is not met for a sustained duration.
The large benefit of using Labview was the rapid prototyping particularly with regards to data acquisition, manipulation and testing. The Labview program was used to input raw data from the wireless sensor modules so the effect of the vehicle could be monitored in real time, this sped up the testing dramatically, being able to store the data and re-input back into the Labview platform allowed improvements to be made to the detection algorithm without the need for futher vehicle testing which reduced the testing time considerably. The Labview program has been used to create a simple but very effective on screen GUI with storage for analysis whilst ensuring easy communication to the wireless devices. Without the use of the Labview platform, the extent of the project would not have been possible.
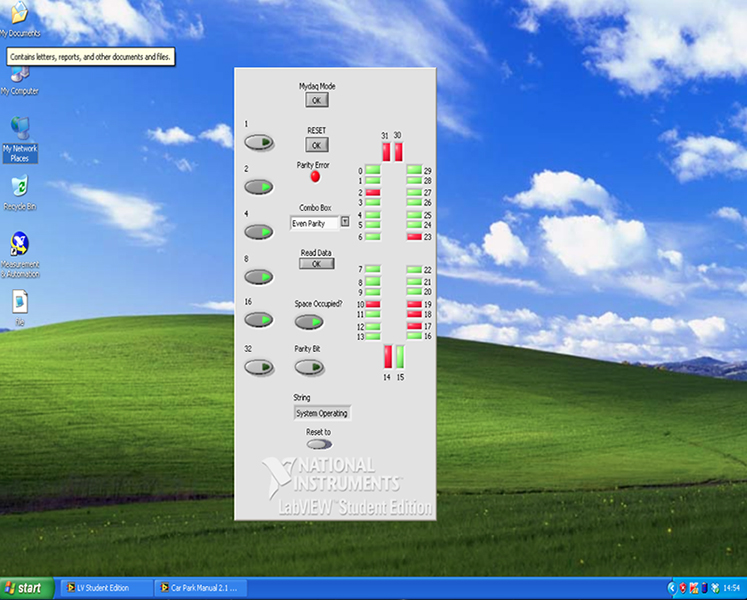
Initial Car Parking Labview GUI reading from on screen boolean switches or MyDAQ digital input pins
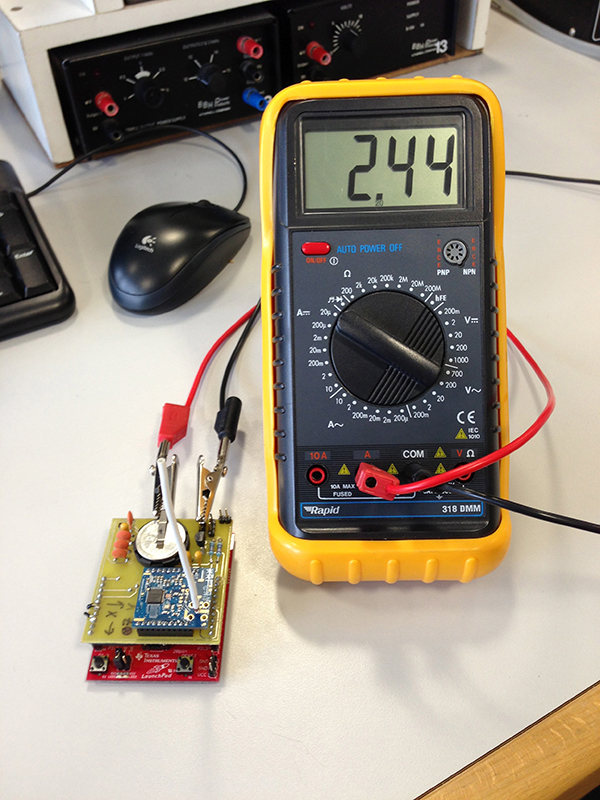
Vehicle Detection Sensor with low power sleep approximately 2.5uA current
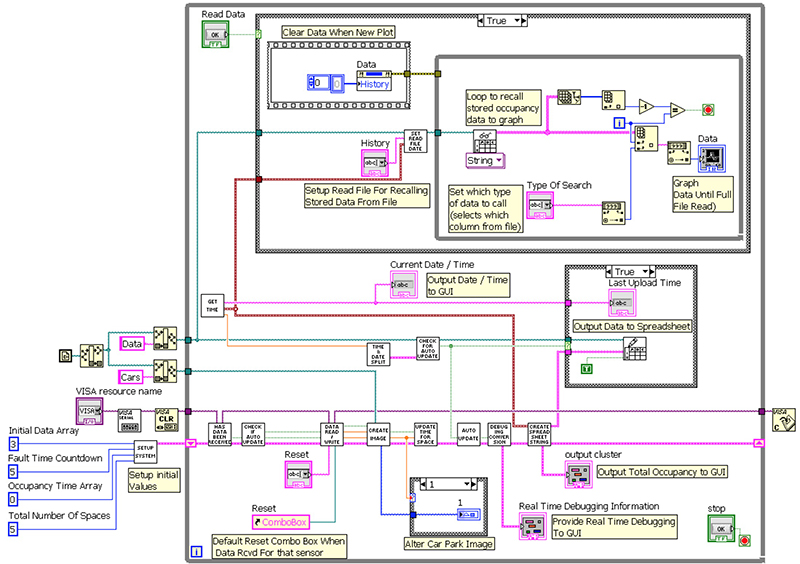
Labview Final block diagram for vehicle on screen real time GUI with statistical storage and graphing
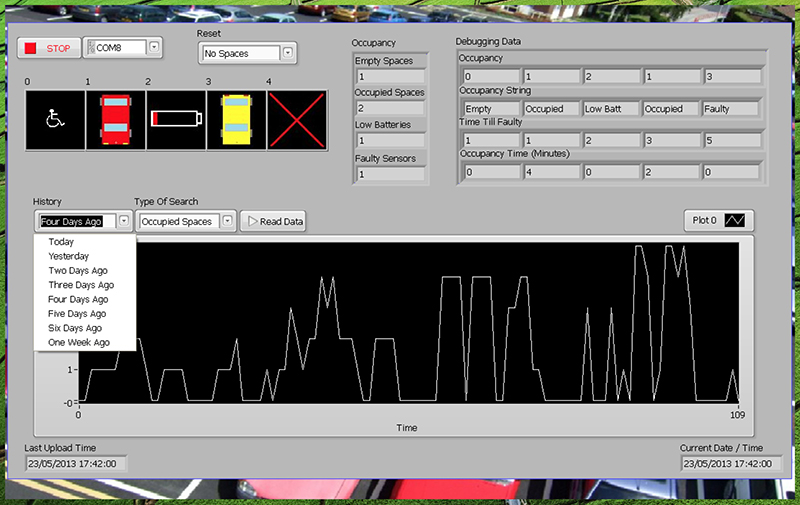
Final Labview GUI, real time vehicle status (top left), debugging information (top right) and recalling and plotting stored data (bottom)

Labview Sensor Simulation (Tx / Rx wireless network data to simulate and read sensor data)
Video 1: Labview initial Boolean GUI with serial data through VISA driver
Video 2: Real Time Data Analysis during Vehicle Detection Sensor Testing - note the colour changing plot, with white not detecting the vehicle, and changing to red as the vehicle is detected
Video 3: Final Labview GUI with real time data and statistical storage and display through graphing
Video 4: Project Open Day Video showing overview of the system
Project is at the stage of being a final prototype, with estimated sensor cost in the region of £10 (GBP) and battery lifespan of 5 years. Further testing of the vehicle detection algorithm and wireless communication would be required prior to implementation. Once the system was operational it would be desired to create an app for mobile phones and tablet devices with a satellite navigation style to aid consumers in reaching empty parking spaces quickly and efficiently.
{kind=link}
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
wow. you h've done it so beatifully. good work darren
Freelance LabVIEW and Arduino programmer.
For projects contact me ; djac791@gmail.com
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Hi
Many thanks!
A lot of time and work went into the project so it is fantastic to get great feedback, had my project open day on wednesday and picked up the award for the best project on the B.Eng pathway so really pleased!
If you have any questions please ask away.
Thanks
Darren
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Good job
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Hi Darren
Great Project , would like to know more about this project , would like to touch base with you.
