Introduction
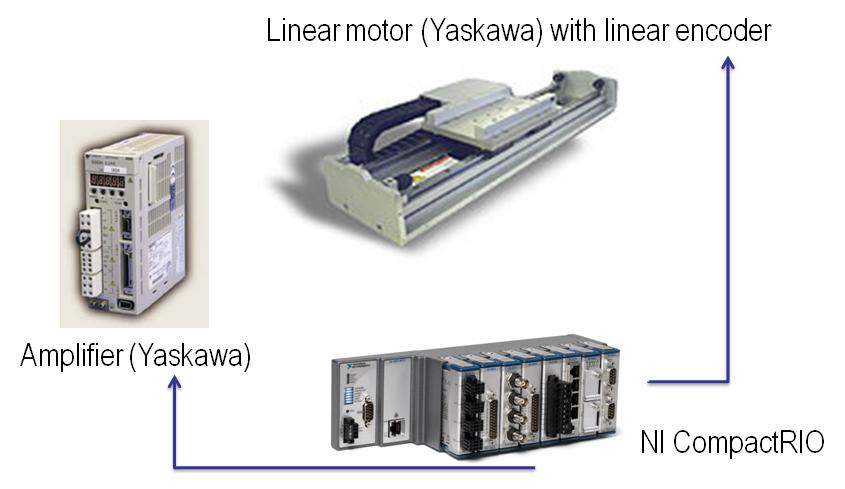
This video shows adaptive PID control for a Yaskawa linear motor. The control is implemented using an NI CompactRIO real-time control system. The LabVIEW System Identification Toolkit is used with LabVIEW Real-Time to create an online system identification loop which runs on the CompactRIO controller. The online system identification loop is used to detect changes to the payload weight. Gain scheduling is used to adjust the PID gains of the system depending on the estimated payload weight. In this demo, the LabVIEW Control Design and Simulation Module is used to execute the real-time PID control loop that runs in parallel to online system identification on the CompactRIO controller . An alternative approach would be to run the PID control loop on the CompactRIO FPGA using the LabVIEW FPGA module.
Setup
The demo was created by Evan Dozier, Rick Dunia, and Jeannie Falcon. Brian MacCleery wrote an Adaptive PID whitepaper which describes the demo in more detail.
