- Document History
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
MedSIM - A Haptic Simulator for Medical Training - 2015 Global SDC Finalist
Contact Information
University: University of Leeds
Team Members (Year of graduation): Dominic Jones (2015), Angus Wooding (2015), Satthaporn Barnes (2015), Rowena Madar (2015)
Project Supervisor: Dr Peter Culmer, Dr Martin Levesley
Email Address: mn11dpj@leeds.ac.uk
Project Information
Title: MedSim - A Haptic Simulator for Medical Teaching
Description:
The project involved the creation of a fully functional haptic mechanism, accompanied by an anthropomorphic casing as well as a full teaching interface. The project opens avenues for much more accessible and higher quality training for prospective doctors, thereby increasing patient satisfaction and safety.
Products: NI MyRIO 1900 – LabVIEW 2013 SP1
MyRIO Module for LabVIEW
Digilent Motor Controller for MyRIO
Dell latitude ST Tablet T02g
The Challenge:
Traditionally, medical training has been based upon physical simulators; using different materials to give a likeness to the sensations of medical procedures. This causes a great degree of waste and expense to universities and teaching hospitals. One possible solution, given the advancement of robotic technologies, would be to use electrical systems to provide haptic feedback, which mimic the procedures in a repeatable manner.
The aim of the project was to produce a novel system for such teaching, building upon previous work using expensive haptic devices. The end result was a fully functioning prototype product produced at a fraction of the cost of both the previous simulators and current medical teaching models.
The Solution:
The project produced a fully functioning prototype of a teaching simulator, complete with haptic simulation, an augmented reality visual feedback, and a teaching interface. The full product was produced in around five months due to time constraints with the project submission, starting in January and ending in late May.
Data Acquisition:
Lab data for the needle insertions were acquired through the use of indentation rigs connected to the relevant needles, generating force profiles for use within the simulation.
Haptic Simulation:
A novel uniaxial haptic feedback system (Fig 1) was produced to provide the force feedback through a needle to the user. This system was used in conjunction with an NI MyRIO and a Digilent motor controller board to generate the relevant forces across the range of the needle insertion. The LabVIEW program used the imported datasets on the MyRIO to cross reference the depth of needle to its relevant force. This was then converted into a PWM signal which would produce a stall torque on the motor, producing the relevant force feedback to the user. The motor itself was highly back-drivable, and so the needle could be moved in both directions with minimal friction..jpg)
Figure 1. The novel haptic feedback sysem
Visual Interface:
The depth and angle of the needle was uploaded to a LabVIEW program on a host computer, which produced a 3D visualization of the simulated procedure. This was done to allow users the opportunity to predict where the ‘pops’ would occur if they were relatively new to the technique. This was produced in a simple manner, whereby anatomical 3D models were produced in SolidWorks, and imported into the LabVIEW front panel (Fig 2). Models of the needles were then overlayed and translated across the surface of the tissues, in order to give the impression that the needle was being inserted into it.
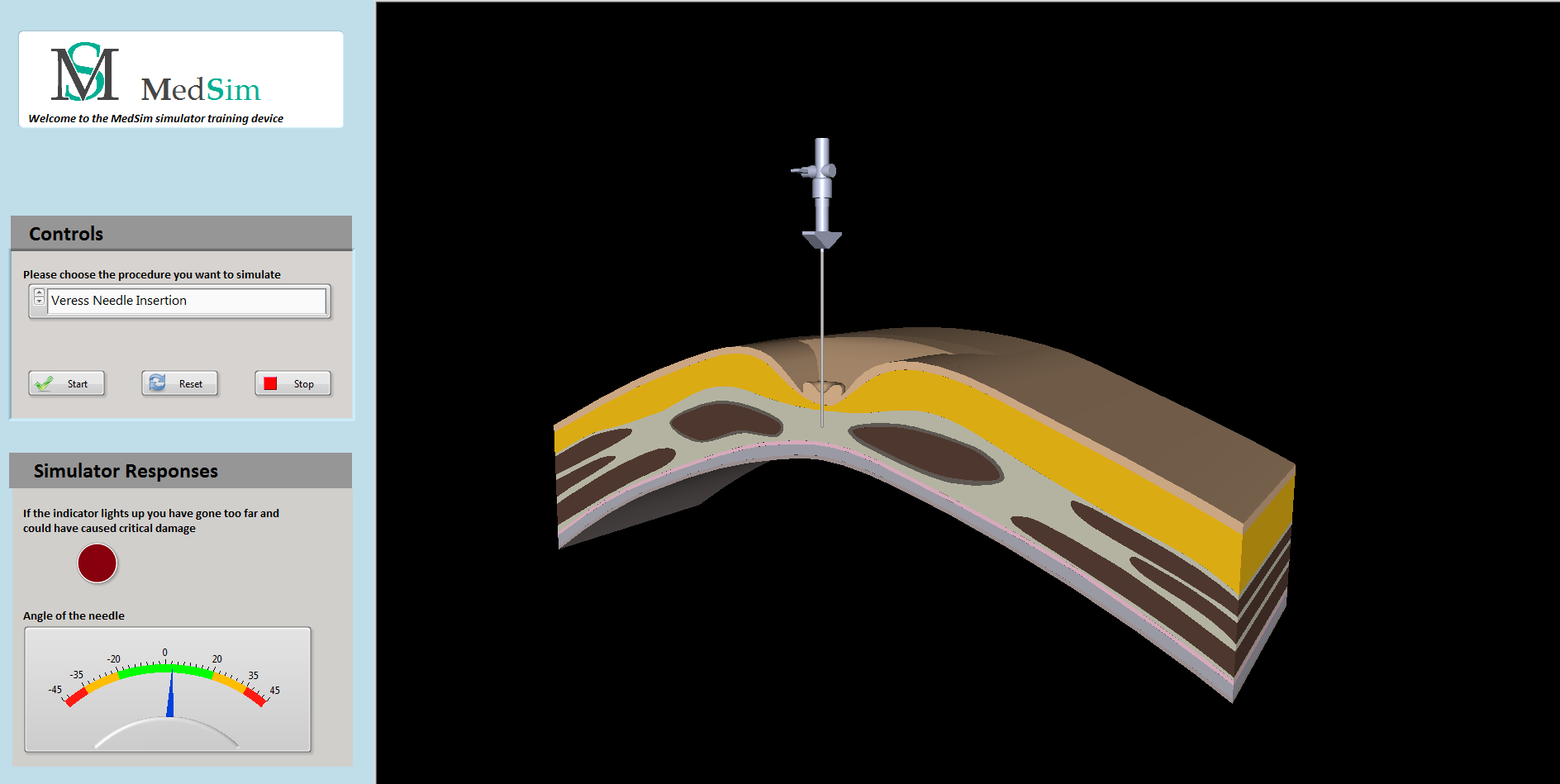
Figure 2. The LabVIEW front panel for the augmented reality
LabVIEW:
LabVIEW was used to control both the haptic simulation and visual interface. Fig 3 shows the process through which this was run. Two Vis were run in parallel to control each process, the haptic simulation on the myrio, and the visual interface on a host PC. Data was passed between the two via utilization of global variables and a USB cable.
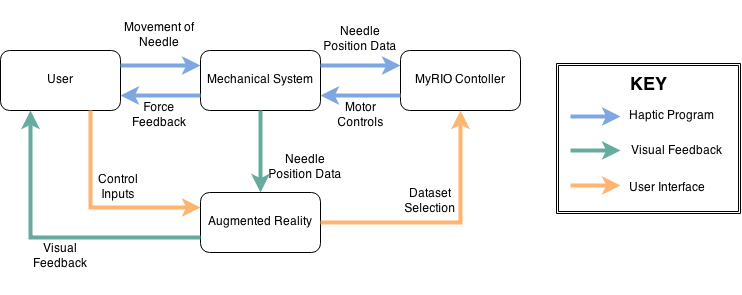
Figure 3. The control diagram for the overall LabVIEW system
Casing and Teaching Interface:
To enclose the haptic system, an anthropomorphic casing of a female torso was prototyped (Fig 4). This included a cavity where the haptic mechanism and MyRIO would sit, with a vacuum moulded plate above the top to hide the inner workings. A full teaching interface was also produced, giving background information as well as guidance in the individual procedures.
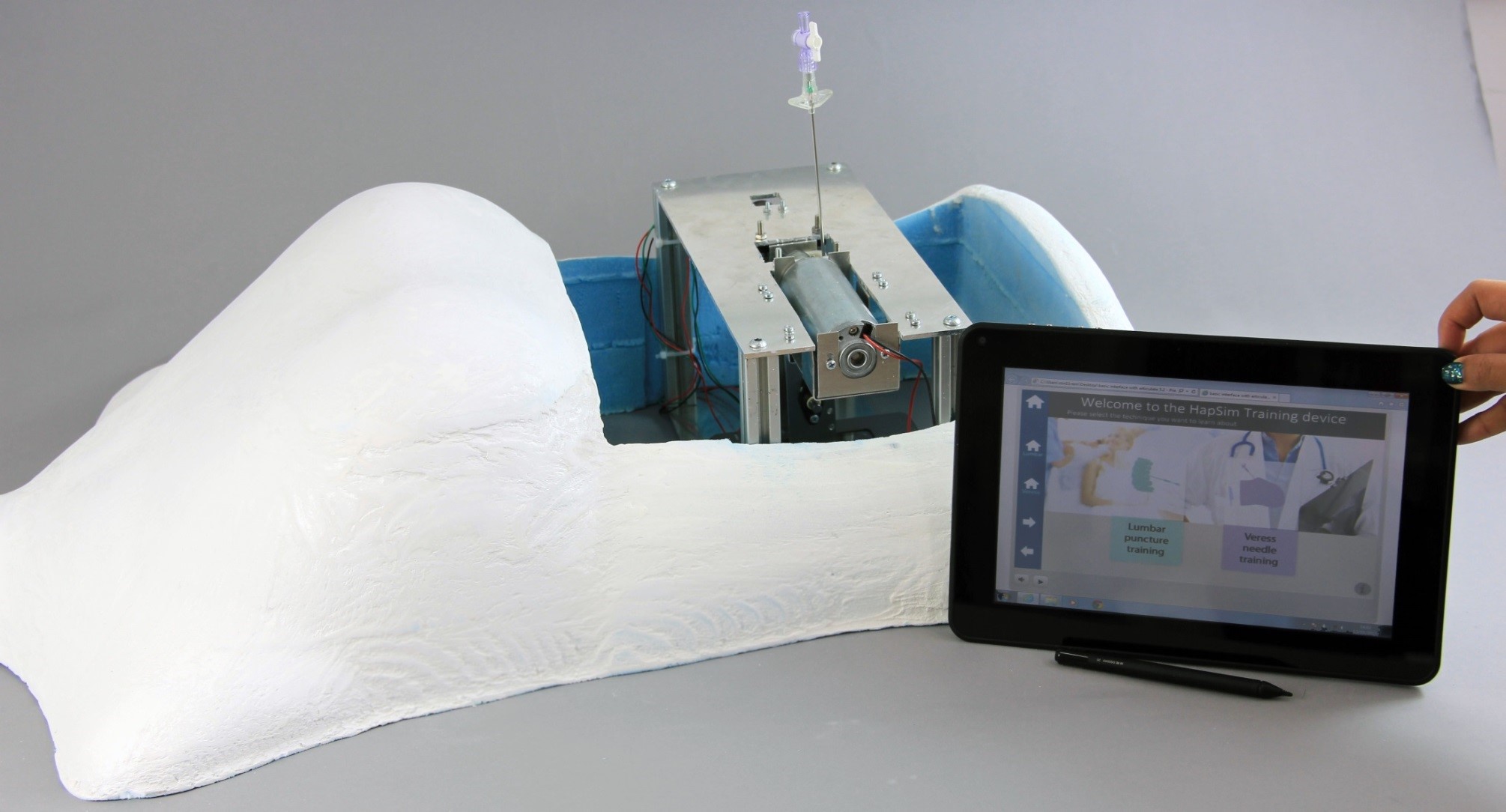
Figure 4. The device casing and Teaching interface
Validation:
The system has been validated by experts in the respective procedures, Drs Madeleine Macdonald and Rory O’Connor, to be extremely representative of the real-life tactile sensations. Also, the cost of such a product is around a tenth of current high fidelity teaching models, and around a third of haptic training devices developed using commercial haptic devices.
Benefits of the MyRIO:
The NI MyRIO has allowed us to rapidly test many methods of programming the haptic simulation, and refine these initial ideas into a fully working simulation. The ease of programming in LabVIEW, as well as its compatibility with 3D models, has allowed us to produce a professional interface, which is easily readable, one of the integral parts of a teaching device.
Nominate Your Professor
We would like to nominate Dr Peter Culmer and Dr Martin Levesley for their constant help throughout the project, with ideas in both programming methods and execution. Without them the project would most likely have gone down a harder and less accurate path.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Fantastic project from a fantastic team, It was a pleaseure working with you all !! best of Luck in the competition !!
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Great stuff - a real team effort to tackle some important issues.
Enjoyed working with you over the year and seeing all the elements of the project come together - apart from being collared for filming!
Good luck!
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Looks amazing. Awesome work!!
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
This project addresses a real gap in the clinical training curriculum for an objective and high-fidelity training tool. I look forward to seeing what comes out of this. Great work guys, and best of luck in the competition!
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Excellent work guys! You've worked well together to achieve a top class project. A really innovative use of the NI myRIO and some quality LabVIEW programming! Best of luck!
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
This work looks excellent. I am interested to know how it develops from here.
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Looks great guys! Really innovative use of the software!
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Just to remind you The director of Medical Education is coming to see your work tomorrow. I'm sure they are looking forward to seeing it all in action see you in the Lab !!
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
well done team, Professor Trudie Roberts (Director, Leeds Institute of Medical Education) asked me to pass on her thanks for taking the time to show her and members of her institute. she said your work was fantastic, you obviously impressed !!!
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
This is an amazing project. I would love to see it in action when I am back in September. Best of luck in the competition guys!
