- Document History
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
The construction and implementation of myRIO based quad-copters with tilting axis control
Contact Information
Competition Year: 2016
University: National Taiwan University of Science and Technology
Team Members (with year of graduation):
1 Wen-cheng SU (2016)、1Guo-hua Huang(2016)、1Guan-Cyuan Huang (2017)、2Hsu-cheng Cheng(2018)
1M.Sc、2B.Sc
Faculty Advisers: Wei-chen Lee Associate Professor
Email Address: taurus666mrg@yahoo.com.tw
Submission Language: English
Project Information
Title:
The construction and implementation of myRIO based quadcopters with tilting axis.
Description:
Based on LabVIEW NI myRIO 2013, each pair of the propellers of quadcopter are able to tilt.
Products:
Main: LabVIEW myRIO 2013, NI myRIO-1900 2.1.0f0
Aid: NI myDAQ
The Challenge:
Program LabVIEW to control the flying balance and the body balance while flying forward after tilting the propellers axis.
The Solution:
Quadcopter, a mechanically simple, unmanned helicopter, is widely used in various fields. Whether it is moving or idling in the air, there are certain requirements must be met. Normally, flying in the air requires the control of six degrees of freedom, but a quadcopter only requires four actuators with fixed orientation, so it is an underactuated controlling system. By controlling the speed differences of these four same size propellers, a quadcopter is able to roll, pitch, yaw and altitude.
We want to avoid the subtle incline of the body while flying forward. One solution is to mount more actuators on the quadcopter, but the control will become more difficult, furthermore, it will add extra loading on the battery. After the brain storming, we decide to design a tilting axis propeller.
The rotation mechanism is made up of one servo and gearset. Each pair of propellers is mounted on one mechanism, so there are two mechanisms. With this mechanism, we can control the direction of each pair of propellers. Once the angle is changed, the force direction of the propeller changed, then, the body can remain horizontal while flying forward. This solution adds little extra loading on the battery.

Our quadcopter is different from other quadcopter, because we use LabVIEW background management and myRIO, to separate four propellers into two pairs. Each pair can incline separately with the help of rotational axis. We can also choose different modes for various conditions to acquire more diverse motion control. See Fig.1~4
When flying at high speed, an ordinary quadcopter needs to incline its body in order to reduce air resistance, for our quadcopter, we only need to rotate one pair of propellers, see Fig.3, which gains benefits on flying control. Our quadcopter even can transform into a four-wheeled car when it is not flying, this function will broaden the application of a quadcopter from the air to the ground.
Our quadcopter will be able to fulfill the limitation of a wheeled robot, for instance, facing large obstacles that it cannot climb through, tasks that requires moving between different floors in a building, etc.

Fig. 1 Rotation of one pair of propellers,front view
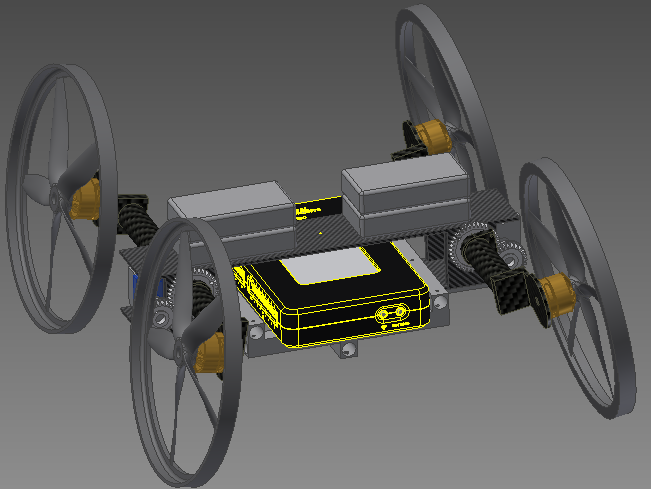
Fig. 2 Four-wheeled mode
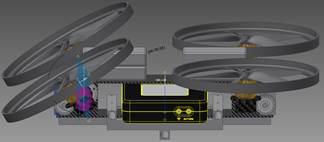
Fig. 3 Rotation of one pair of propellers, Perspective view
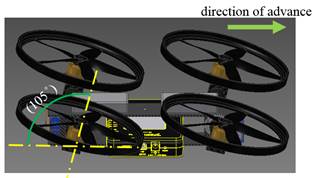
Fig. 4 Flying with both axis rotated.
The operation of software and hardware
We apply the fallowing functions in LabVIEW into the motion system of our quadcopter : myRIO vi、PID vi、Control design vi and Internet Shared Variable. In order to control remotely, we even apply the WIFI remote control function integrated in myRIO to make our quadcopter become a wireless access point (WAP).
Regarding to the flight motion control of a quadcopter, the most important one is the control theory of body balance. The theory requires to build up kinetic model, solve kinetic equations in Dynamics, and apply classical control theory – PID controller. Thanks to the diversity of sub vi. Library in LabVIEW Control Design, we are able to build up our model efficiently and select controllers properly, which saves a lot of developing time.
Our quadcopter is composed of a self-made carbon fiber frame, circuit system, mechanism system, and controller system. During the developing time, we use different kinds of traditional and numerical machine tools, also rapid prototyping 3D printer, to make our parts. Moreover, we build up a fly-testing platform to help us adjustment and simulate our quadcopter before taking off.
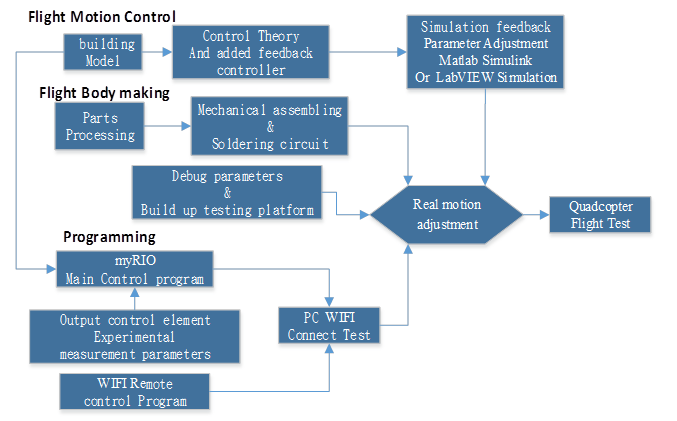
Fig. 5 Design & Development flow chart

Fig. 6 Flight balance control
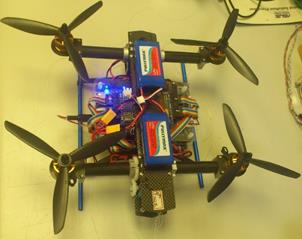
Fig. 7 Current outfit of quadcopter
Conclusion
Our quadcopter is based on the developing environment of National Instrument. We do not need to add extra wireless transmission and too many sensors. We only add a gyroscope sensor to calculate the flying angle for feedback signal of gesture controller. We have finished the WIFI remote control integrated in myRIO, body gesture auto-tune and auto balance control, rotation angle control of rotatable axis propellers. In the near future, we would like to optimize our quadcopter with more efficient flying and tilting axis propellers control.
Video Reference:
https://drive.google.com/folderview?id=0B16AziZmed2vbkZ0ejViczJlTHc&usp=sharing
