- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
Inconsistent Robot Behavior - Labview Schematic Question
02-08-2014 03:53 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
Hi,
We are a first year FTC team. In Autonomous Mode our robot works correctly about 6-7 times out of 10. I'm trying to determine what is happening the other 3-4 times. By inconsistent I mean that sometimes the motors don't seem to be getting the correct signals. It will turn the wrong way, turn when it is supposed to go straight. Also we have the program checking encoder values for distance and sometimes it just doesn't seem to be reading/transmitting the encoder values to the NXT (we display the values on the brick). Sometimes it doesn't appear to be reading the IR beacon values at all, etc.
I'm thinking it might be a hardware issue and I've noticed something in the schematic when the robot is connected and wanted to see if this was normal behavior or if maybe this is part of our problem.
When viewing the encoder values in the schematic, it will display a value like 2535, but every now and then the value zero's out and then go back to 2535. Also when looking at one of the Motor Controllers, the battery level usually displays 12.4, 12,3 or something like that, but occasionally it flashes 0.0 and then goes back to 12.4. I'm thinking that those values should stay constant when the robot isn't moving, but powered on and connected. Here are some screen shots of what I mean.
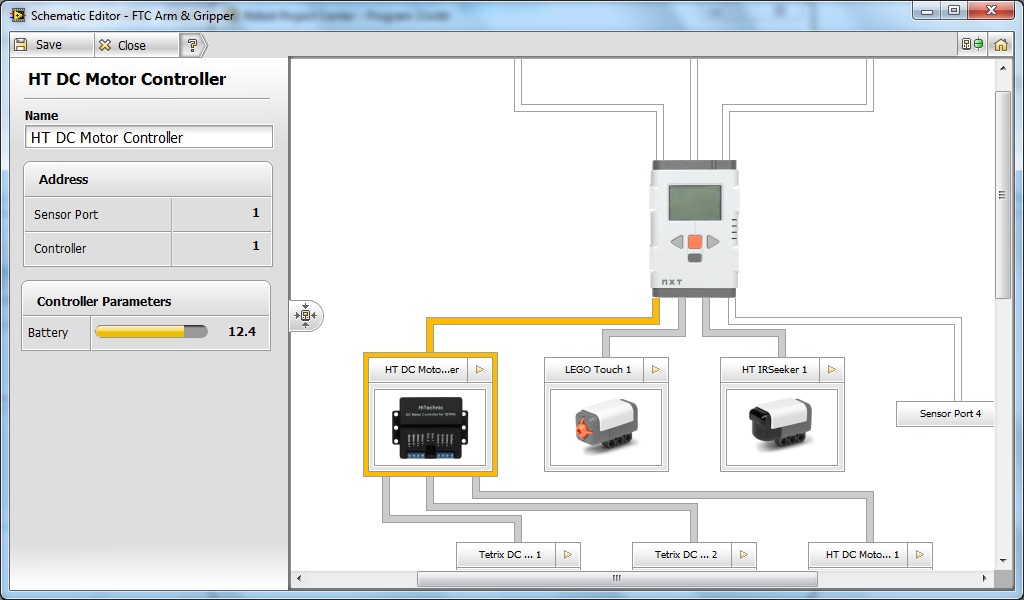
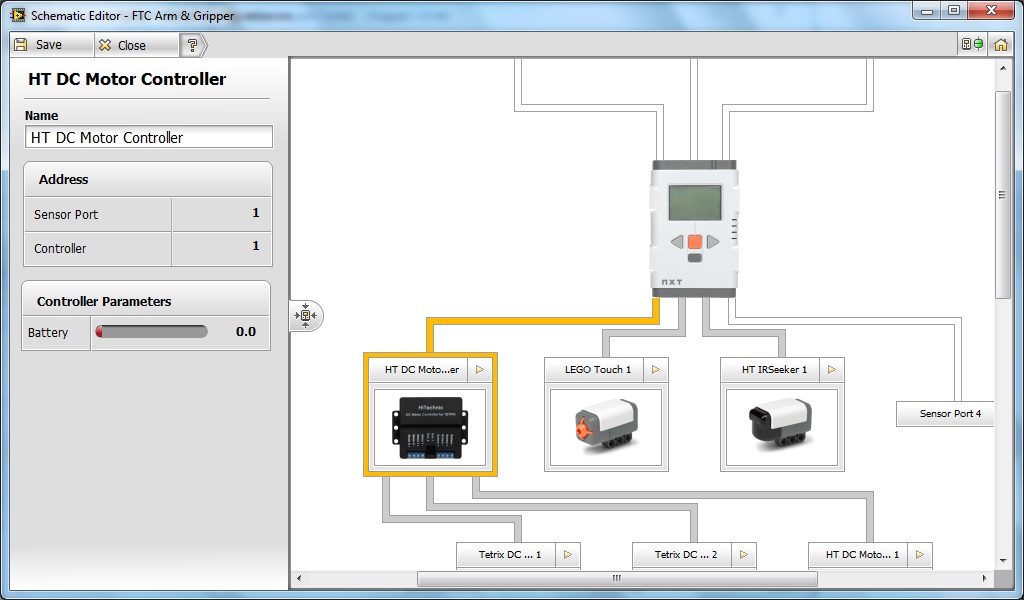
Is this normal behavior or might this be part of reason for our inconsistent behavior?
Thanks for any input.
Jeff
02-08-2014 11:48 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
What you describe is normal behavior. I believe the battery level indicator is due to when it 'queries' the battery - we've always seen that behavior.
The motor encoder data anomalies are also normal. There are discussions surrounding this in the FTC forums (among RobotC teams too) - this is definitely a hardware issue regarding the encoders. It is more common at higher powers.
You can consider filtering out the bad data using software. Consider the numeric operations of 'NXT max and min' or 'NXT in range and coerce' found under the 'NXT Programming - Numeric' palette.
This post might interest you: https://decibel.ni.com/content/message/33394
02-09-2014 05:52 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
Agreed that this is "normal" behavior. The encoder can and often does miss a read. We have found that encoders are useful for moving motors at a fixed speed but completely unreliable when trying to move a fixed distance.
