myRIO HC-SR04 Ultrasound Module
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
Code and Documents
Attachment
Overview
This code is for use on the FPGA of a myRIO, and is used to get a time of flight reading from a 4 pin ultrasound sensor, such as the HC-SR04
Description
Using pulse width measurements, this code measures the response of an ultrasound module to give the time to receive a response. This time directly corresponds to distance, and can be converted by dividing by 1,000,000 (to convert to seconds) then multiplying by the 340 (the speed of sound).
There are two loops in this code, one to manage the pulse width measurement of the module's ECHO line, and another to trigger the module on the TRIG line.
Steps to Implement or Execute Code
- Create new project
- Add this code to the FPGA target of a myRIO
- Ensure that your hardware matches the connectors used in the VI (In this case DIO3 on connector C is used for ECHO and DIO7 on connector C is used for TRIG)
- Compile FPGA code
- Run FPGA code
(This code will not run unless under and FPGA target in a project)
Requirements
Software
LabVIEW 2013
Hardware
NI myRIO
Additional Images or Video

Applications Engineer
National Instruments UK
Example code from the Example Code Exchange in the NI Community is licensed with the MIT license.
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Please place the 2011 version compatible vi .
Thanks in advance
Tejas
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Hi,
Thanks for your VI. I am trying to deploy this in labview 2014 and I keep getting an error: Find the vi named: "nirbiEmuTemplateMethod_erros.vi"
I wonder if you could help out with this missing file.
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Hi,
could you please tell me in wich range the distance measurment works?
I am looking for a system to detect very small distances like 10µm to around 5mm.
But at first thanks for such a nice VI.
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
it finds an error on your vi.. do you know how to solve it
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Hello, I am new to Myrio !! I need to use this sensor for distance measurement. I will be greatful if someone provide me with the VI that works fine.
Thanks
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
hello, i'm a newbie of myRio (FPGA)..
i'm doing my project now about ultrasonic sensor SR-HC04 that need recognize distance in centimeter..i just know time of flight in uS ,, but i need the distance data in centimeter..So how can i solve it?? To all the expert please help me to solve my problem...
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
hi there.. the time is in μs (*10^-6 seconds). so, you will have to:
1. divide the result by 10^6 to get the result in seconds
2. Divide by 2, because the time measured is for the whole trip, going and coming, but the barrier found is in the middle of this time
3. Multiply by 340m/s, the speed of sound, ant the result is the distance in meters
4. for cm, divide by 100 and you are good to go
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Can you please tell me how you programmed myrio to get the pulse width in microseconds, that would help me a lot. Is there any kind of interrupt which triggers the count.
Thanks
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Can we use Ultrasonic sensor to with MYRIO in Real time target mode....
If yes, how ?
If no, why....
Pl help as my project is based on this...
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Thank you MHutch,
i have the Version Labview 2015.
The first problems was the DIOxx, because the VI from MHitch ist 2013. After change the DIOxx to correct function, was to be running the Project.
And the helpinging from prince29 was beautiful.
Sorry for my bad English.
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Shubhangijoshi,
It would not be good to use RT for this as it does not give as good timing precision.
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Nice work..
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Hi,
could you please tell me, how we can use this code not in FPGA mode, because we need data from sensor fore another function that we can not use in FPGA mode, like controling motor or something similar.
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Hi,
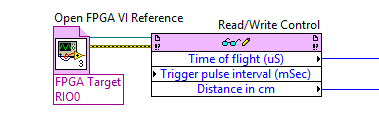
We need not necessarily use the VI in FPGA mode to acquire and view the data.
You can simply use the Open FPGA VI Reference and the read/write control to get the same values in the RT VI.
Hope this helps you.
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Hi ,
We also have that problem, we run FPGA VI and get values from sensors, then we get this valuse using Open FPGA VI Reference and the read/write to another RT VI but on this RT VI another function dont work, like controling motors, LED diods or sometihing like that. Generally its look like this two VI cant work simultaneously, but we dont have any errors, and both VI are runing.
If you have any idea or solution, we would be grateful to share it with us.
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Can you please elaborate on your problem and create a thread in the forum?
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Hi,
We have 3 ultrasnic sensor, and mesure distance with them in FPGA mode, then we must use that measurement and control robot(4 DC motor RT VI) , if distance is less then some value robot must stop.
Generaly, problem is that when we run FPGA mode other simple VI don't work. For exemple, we try to turn on LED diods on MyRIO parallel with FPGA VI, we compile both VI and dont have any errors, but our LED diod dont react when we press button.
But FPGA VI work well. Our priority task, is to make bond between FPGA VI that give us feedback about distance, and that use that variables to prevent the robot from punching the trammels in RT VI.
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Hi,
I really don't see any reason why your VI won't work.
I can recommend you to only acquire data in the FPGA VI and link the data to the RT VI and use and process it there.
Do not do signal processing in the FPGA VI, it will just complicate things. There will be no need for you to actually RUN the FPGA VI, just refer to it as I said before.
For example, create controls for the LEDs in the FPGA VI, and actually control it in the RT one.
If there is any problem that you can't understand, please post to the NI forum, attach your files and I can try to do my best to help you.
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Ok, I will post to NI forum and attach files. It just example for LEDs, our program is a litle bit complicated, we just need to use measurement from sensor in FPGA mode to RT VI, and we get measured distance in RT VI, but other funcion in that RT VI don't work.
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Hi,
I couldn't find the donwload link, was it removed or am I just a newbie that can't see it?
Thanks in advance
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Hi ,
sensor vl53l0x compatible with myrio(1900 series) ? because it is using API . There is a way to use API in myrio(1900)
can pls advice on this ...
thank you .
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
hanks for your VI. I am trying to deploy this in labview 2014 and I keep getting an error: Find the vi named: "nirbiEmuTemplateMethod_erros.vi"
I am having this issue can anyone help to solve it?
