- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
myRIO Balancing Robot - Mechanical Redesign
12-12-2013 04:58 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
| This document was created for the myRIO Balancing Robot Project https://decibel.ni.com/content/groups/myrio-balancing-robot |
myRIO Balancing Robot - Mechanical Redesign
How can the myRIO Balancing Robot be used for teaching students in mechatronics?
The main aim of this so-called Advanced Design Project (ADP) at the Institute for Mechatronic Systems in Mechanical Engineering (IMS) at the Technical University of Darmstadt was the optimization of the existing prototype with respect to mechanics, sensors and actuators. The outcome is the mechanical redesign of the robot optimized for the academic teaching with a focus on mechatronics. The result for the NI-community is an affordable myRIO Balancing Robot concept with multifunctional usage opportunities that anybody interested can buy and build on their own. In addition to a partlist, a new robot casing has been developed and created via computer aided design (CAD). A STEP-file of the casing is attached to this template.
Table of Contents
- Overview
- 1. Redesigning the Prototype
- 2. Software Implementation
- 3. Hardware Implemenation
- 4. Conclusion
- 5. Further Information
1. Redesigning the Prototype
As a subproject for the development of the myRIO Balancing Robot, our team of five students at the TU Darmstadt developed a concept for a usage in regard to academic teaching concepts in control technology, mechanics and mechatronics. To do so, the following steps were taken:
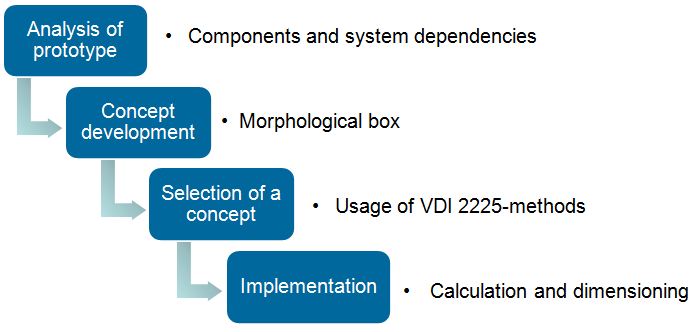
Making use of product development methods and identifying possible functions lead to the development of different concepts. One of our concepts focuses on technical mechanics, another one on the implementation of process control technologies. To maximize the usability for students, we asked ourselves: How is it possible to combine both concepts and their key functions? We identified two key issues that can add functions of a balancing robot within teaching mechatronics.
- The difference between sluggish and dynamic mechanical behavior can be demonstrated and calculated. The adjustable center of gravity of the whole balancing robot leads to different requirements for actuators and the control system. It enables the possibility to vary the mechanical behavior of the balancing robot and to point out technical dependencies between the mechanical behavior and necessary adjustments of control parameters.
- For the sensor detection of the tilt angle and the tilt angle speed, an inclinometer and a gyroscope is used. As the myRIO includes an inclinometer (The accelerometer can be utilized therefore), the usage of both sensors is reasonable and affordable. To enable a good control for the balancing robot, a suitable setting of motion parameters has to be implemented. To improve the signal quality, a Multi-sensor Data Fusion between both sensors can be realized. Combining two signals to one with a better quality enables a well-tuned control system. The outcome for students is the possibility to build a complex control system for the robot with a lot of possible variations.
The result is the so-called Hybrid Concept with an adjustable center of gravity and the possibility to realize a Multi-sensor Data Fusion. The implementation of an adjustable center of gravity could be realized through the development of a new casing for the balancing robot.
2. Software Implementation
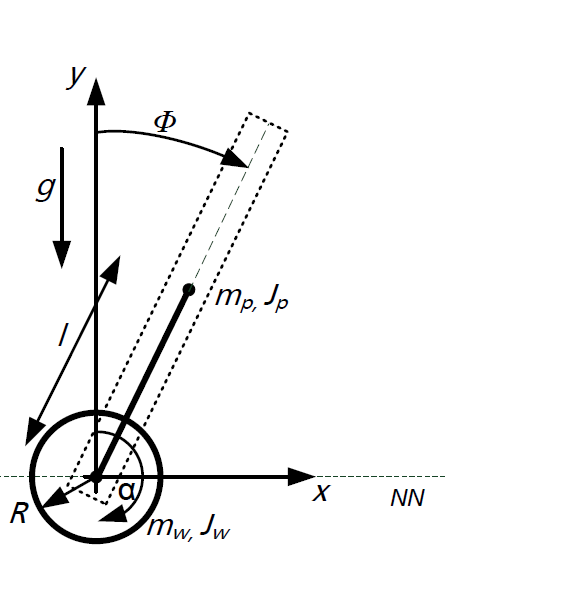
To get an understanding for the dynamic behavior of the existing balancing robot prototype, we created a model in Matlab/Simulink. Therefore, we simplified and combined components to a rigid pendulum p with two wheels w and implemented their masses and mass inertias. We used the known technical data of the actuators and simulated a straight movement with a constant motor torque in our mechanical model with two degrees of freedom: The rolling motion angle of the wheels and the tilt angle.
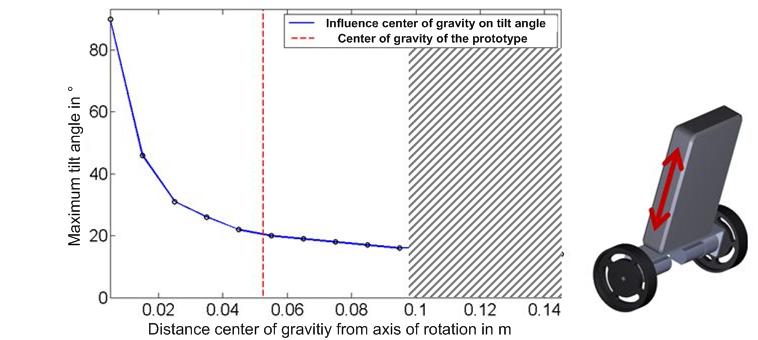
With our created model, we can simulate and identify different maximum tilt angles for a constant motor torque and a varying center of gravity of the pendulum. Thus the simulation shows for which maximum tilt angle the robot is able to stand up. The implementation of the iterative changing of the center of gravity is realized via a programmed Matlab-script. The simulation stops when the pendulum is in a vertical position again (until Φ=0°). With the use of the created model we could define new specific requirements for our Hybrid Concept. The aim is a high impact of the center of gravity on the maximum tilt angle and the dynamic behavior of the system. Our conclusion is to set the center of gravity in an adjustable area with a minimum of 0.1 meters distance of the center of gravity to the axis of rotation.
Additional conclusions for a new concept could be made. For more information, see 5. Further Information.
3. Hardware Implemenation
During this ADP, we compared different components from different providers. Our aim was to choose suitable parts for a good price. To find and compare suitable components, we engaged in an intensive internet research. One aim of the concept is to show the changing dynamic behavior of the actuators, due to a changing center of gravity and the resulting mass moments of inertia. Therefore, we tried to avoid oversizing components.
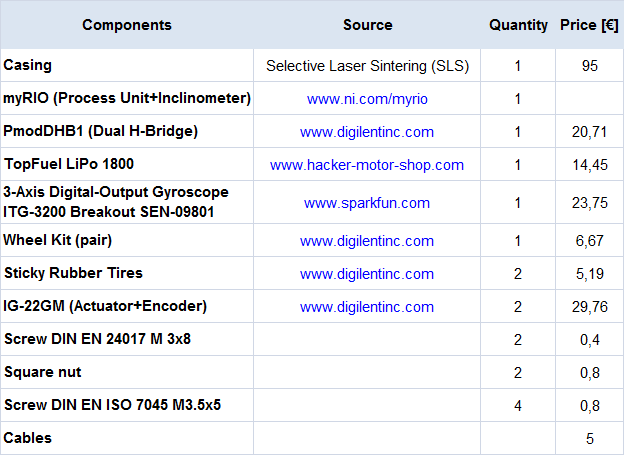
All parts can be bought by private customers. The estimated overall costs of the parts should be within a budget of 250 €. However, the big question mark is the production of the casing: We asked commercial providers of different rapid manufacturing methods for the cheapest possible offer. The best offer we got was a production via Selective Laser Sintering (SLS) with polyamides for 95 € per casing. The price can highly vary and depends on the number of produced casings and the production method. The casing consists of two parts and protects and assigns the parts of the balancing robot.
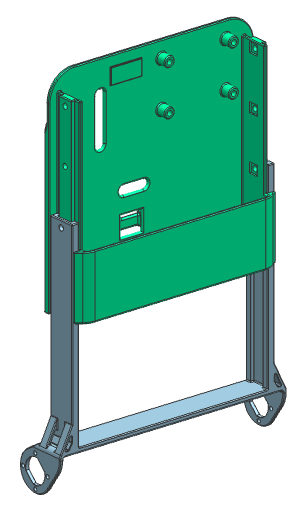
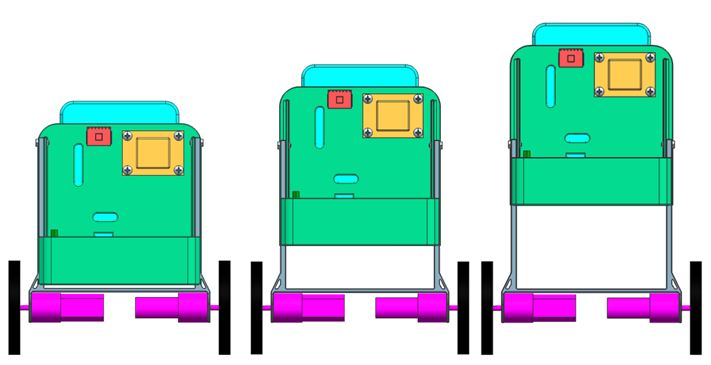
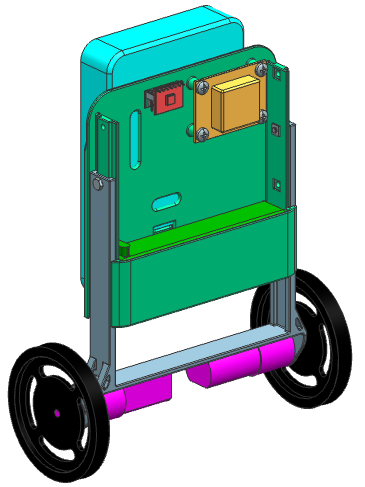
To reach a maximum variation of the center of gravity, it is reasonable to realize a flexible position of the heaviest parts of the robot: The myRIO and the accumulator. With our casing, we enable three different kinds of possible positions:
4. Conclusion
We analyzed the existing prototype and created a simplified mechanical model of the robot. The model can be used as a basis for the simulation and improvement of balancing robots. In the next step we defined requirements for a new, optimized balancing robot. With the aid of product development methods, we realized a partlist and a casing for the usage of the balancing robot as a teaching tool in mechatronics. The shown partlist can be seen as a proposal for an affordable realization of the robot. The casing is dimensioned for the chosen parts and can be modified as well. We encourage interested community members to build or buy the casing and verify our assumptions. Additionally, we would recommend that our model is used as a basis for further research work and analysis.
5. Further Information
We added the most important documents:
-The documentation of our project in German
-The presentation we gave at the TU Darmstadt (IMS) in German
- The Step-Files and illustrations of our casing for further use and research
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
