2013 Life Sciences Finalist
Performing Fatigue Destructive Testing on Ankle-Foot Prostheses
Authors: Hung-Jen Lai, Chien-Hua Chen, Jain-Hong Lin, Wei-Kai Wang, Hsiao-Kuan Wu, and Chung-Huang Yu, TEH LIN PROSTHETIC & ORTHOPAEDIC INC., National Yang-Ming University
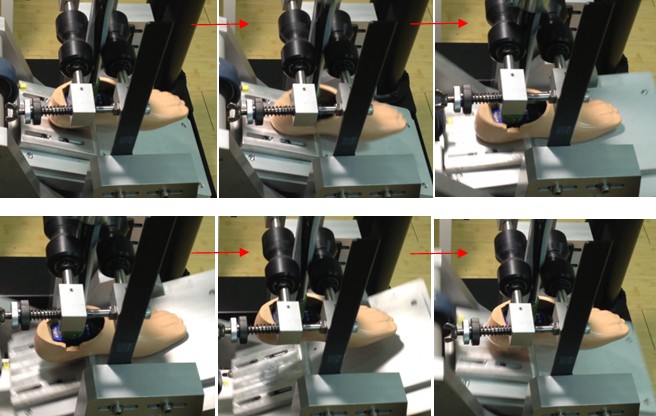
Challenge: Requiring ankle-foot prostheses under test to precisely follow a complex trajectory and loading profile while stepping on a tilting foot platform from heel-strike to toe-off, under the new ISO 22675 testing standard. In addition, the system needs to withstand a long repeated testing period while being flexible enough to adapt to different prostheses designs.
Solution: Using the NI sbRIO-9602 controller as the control platform while integrating NI 9215 and NI 9411 C Series modules to capture load cell and encoder signals. The FPGA on the NI Single-Board RIO controller was programmed for high-speed, precise, and synchronized motion control of the two servo motors, and a human machine interface (HMI) was programmed on the real-time OS to handle the trajectory generation and detect prosthesis failure.
To vote for this submission for the 2013 GSDAA Community's Choice Award Winner, "Like" this document. Click on the "Like" symbol in the bottom right corner of this window.
To read the entire paper for this submission, download and view the PDF attachment on this document.
>> Learn more about the Graphical System Design Achievement Awards.
