- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
Object tracking without preloaded image
04-25-2016 02:09 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
Hi
I'm using a myRIO and microsft kinect. So fare i have looked and modified examples about color tracking and obstacle avoidance. Now i want to build a robot that can track an object, another robot, without any pre loaded image. Tack the other robot by its movement as soon as it comes into range. The enviroment is not very light, so a bit darker, which makes color tracking difficult to use.
Can someone give some tips on how to do it or come with some examples, because i can't find any, only with patternmatching based on a picture.
Thanks
05-21-2016 08:19 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
Hello Bishop747
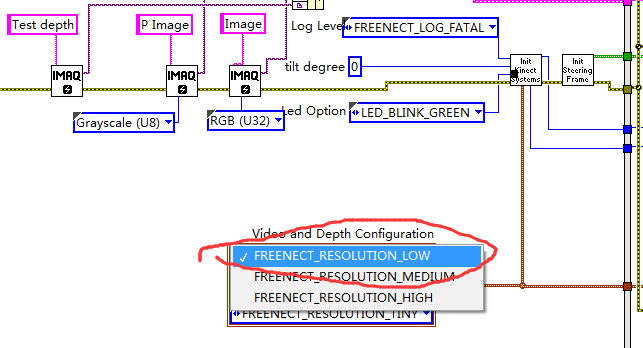
I am doing a project recentelly using kinect with myrio. But when the resolution of kinect is higher than 680*480, the fps is so low that couldn't work. When I try to turn down the resolution, I don't get any graphy of camera. But the depth graphy works well. Do you have any idea whether myrio could output 320*240 resolution image.
05-26-2016 02:03 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
Hi DDHITO
I think it might be because of the subVI from the open source program. I remember something about it, that it only would run on medium. It means it is currently only running on medium and no other image size/resolution. I reduced the image size for further processing by resizing it, integrated VI from labVIEW, to the desired size.
I hope it helps and sorry for late reply
05-27-2016 11:46 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
hi Bishop747
thanks for your reply, I think it might be the problem of Kinect that we can't get Low picture. Any way i am finding another way out.
