The robot state is governed by a variety of inputs. Knowing how these are used in programming and displayed on the driver station are critical to using and debugging the roboRIO.
A robot can:
- Be enabled or disabled
- Be in Autonomous or TeleOperated mode
- Maintain or lose network communication
- Have code installed on the roboRIO or not
Please Note!
All information regarding the Field Management System (FMS) is derived from discussions with FIRST's engineers. National Instruments did not make the FMS and does not support it. While we will do everything we can to help, NI should not be considered the expert on such matters.
Enabled/Disabled
This state is displayed by the toggle in the lower left-hand of the driver station. Both TeleOperated and Autonomous states will need to be enabled. When the station is plugged into the FMS, the FMS controls this.
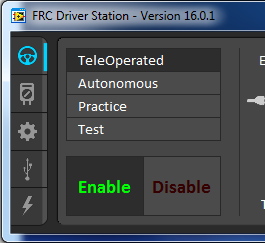 Figure 1: Enabled Driver Station
Figure 1: Enabled Driver Station
Autonomous/TeleOperated
This state is changed depending on whether the TeleOperated or Autonomous window is selected and subsequently enabled. A messaged will display on the driver station indicating which mode is enabled. When the station is plugged into the FMS, the FMS controls this.
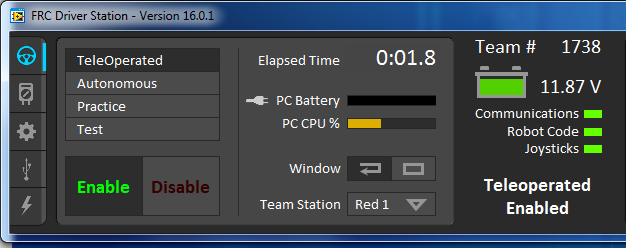
Figure 2: Enabled TeleOperated Mode
Network Communication States
This state is displayed with the battery voltage indicator and the ‘Communications’ light on the driver station. If communication is maintained, the voltage of the battery will be continuously updated, and the indicator will be green. The COMM LED on the roboRIO will also be green. If there is no communication, the battery voltage will be blank, and the battery indicator and the ‘Communications’ Indicator will be red.
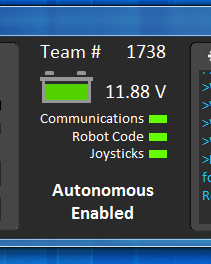
Figure 3: Communications Enabled

Figure 4: No Robot Communication
Robot Code State
This state is displayed with the ‘Robot Code’ indicator. If code has been deployed successfully to the roboRIO, this indicator will be green. If there is no code running on the roboRIO, this indicator will be red. Note that you may need to restart your roboRIO after deploying code to make sure the program begins running.
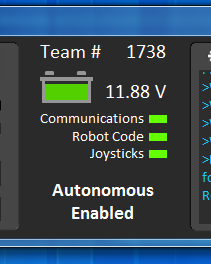 Figure 5: Robot Code successfully deployed
Figure 5: Robot Code successfully deployed
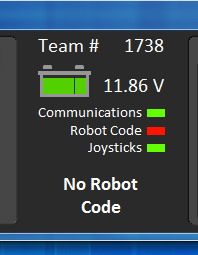
Figure 6: No Robot Code deployed
When programming, there are four main states that should govern the way your program works.
- Autonomous Disabled—the state the robot is in when it is powered on
- Autonomous Enabled—the state of the robot for the first 15 seconds of the match
- TeleOperated Disabled—the state of the robot after the 15-second autonomous portion has finished
- TeleOperated Enabled—the state of the robot for the remainder of the match.
You can monitor these states with the robot mode VIs and functions in LabVIEW. Good luck!
