Contact Information
Author: Jonas Martinsson, Patrik Pärlefjord
School/University: Mälardalen University, SWEDEN
Title: Parallel robot, the pantograph example
Introduction:
This project is the result of a 15 credit course in electrical engineering given at Mälardalen University, SWEDEN during the summer of 2014. This project was a way for the students to combine their knowledge in electrical engineering, software development and mechanical design. The students had to find solutions on their own and work as a team in order to precede with the project.
Goal:
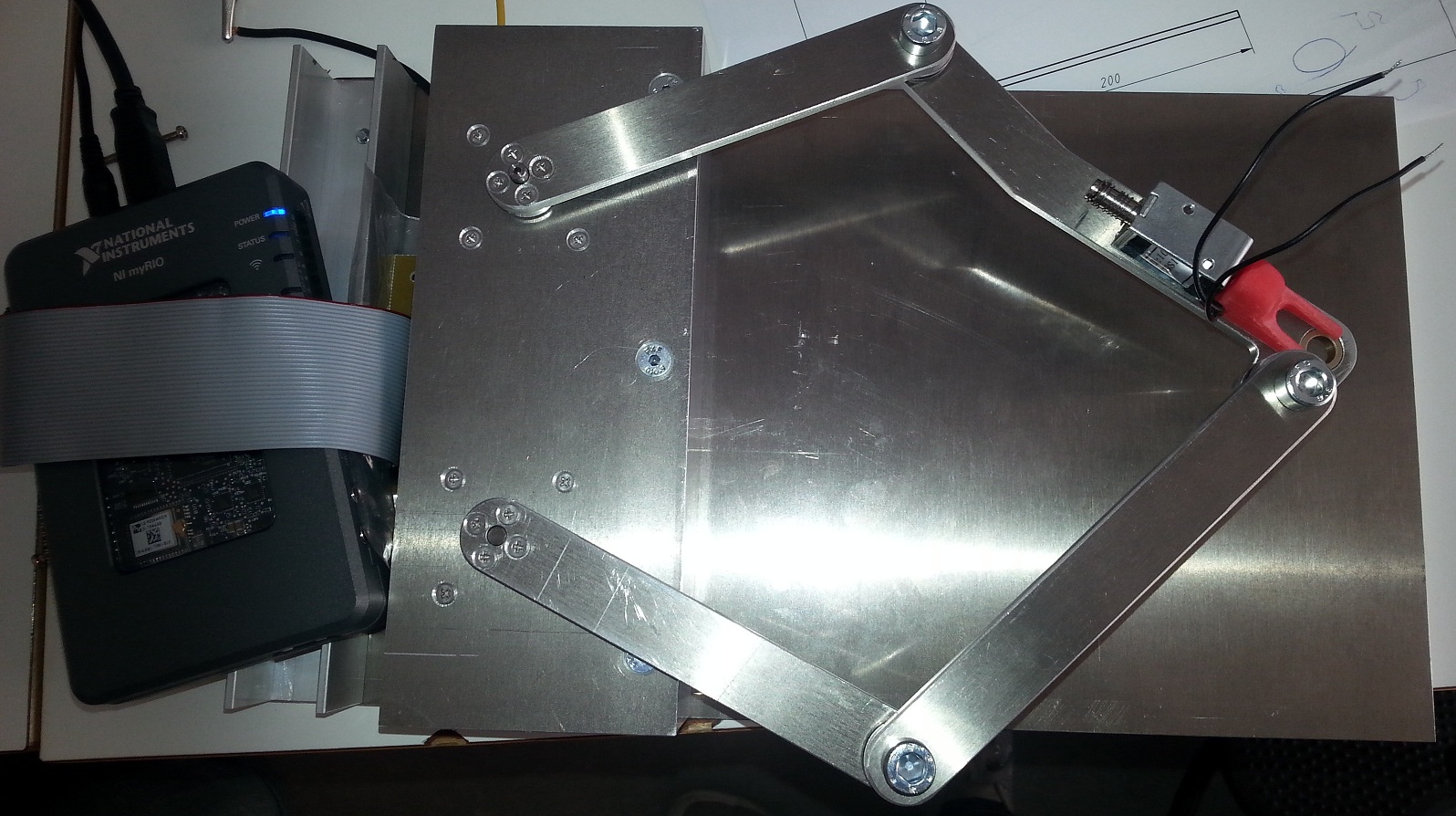
The key goal for this project is to build a robot with parallel arms that moves in a 2 dimensional space. Booth the mechanical structure, the circuits and the programming has to be done by the students. The robot has to have some kind of meaningful purpose, a grip, pen or other tool at its tool center point. The software should intuitive solutions in the way for the user to control the robot.
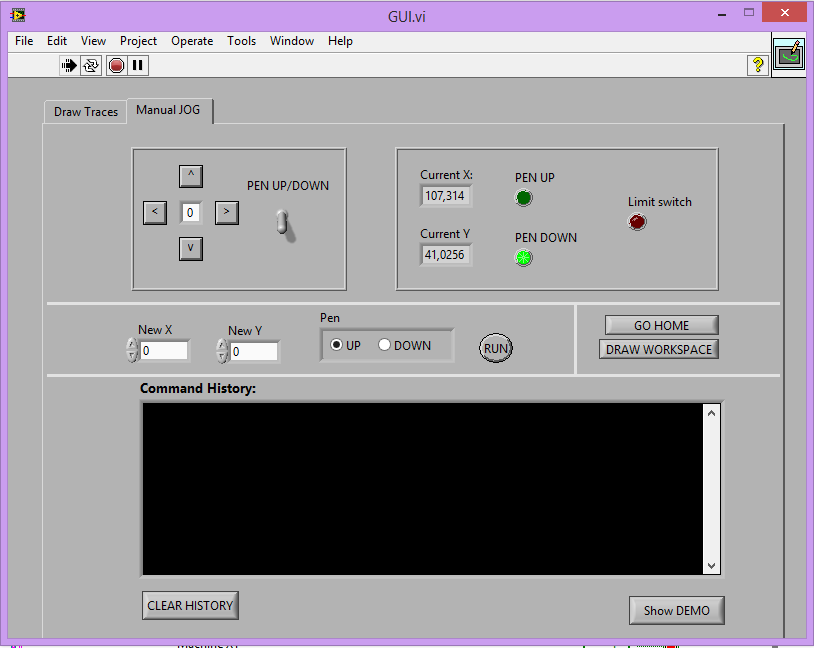
The JOG, go to point and show demo part of the GUI
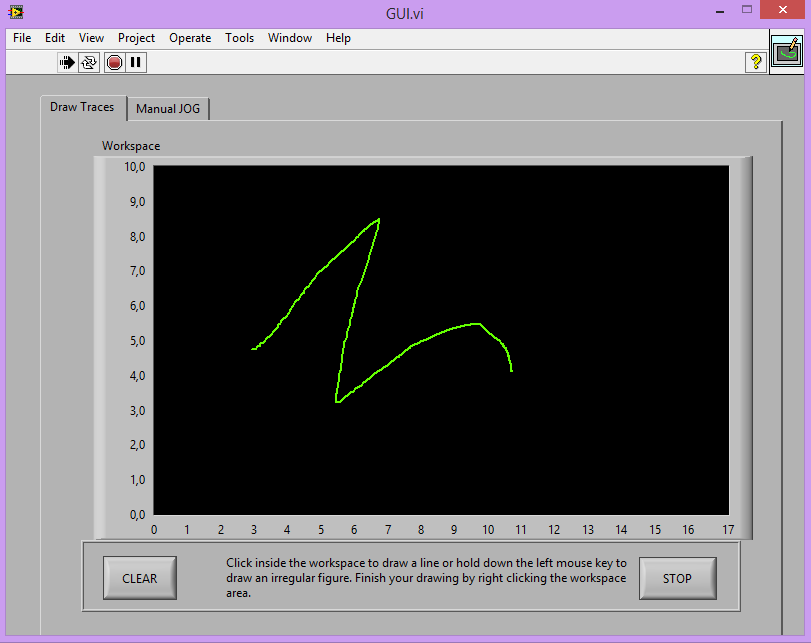
The Free hand drawing part of the GUI
System Requirements:
- A paralell robot with stepper motors and TI drv8824 controllers.
- NI myRIO
- LabView 2013 myRIO
Code Instructions:
Start the program by running the MOTOR_CONTROLLER_DIO at the myRIO target. When time to finish is down to zero you can start the GUI and begin playing with the robot.
Solution/Conclusions:
The graphical user interface is designed with help of an example found in the LabView example finder, where the user can click on an XY-graph and the corresponding mouse coordinates are converted into lines on the graph. That graph, those coordinates is then used to feed the machine in order to draw the graph picture at a piece of paper with an inc pen. The implementation includes a way of lifting the pen between the figures with a solenoid and a leaning plain, as can be seen in red in the top picture. This solution where not satisfying since the force and stroke of the solenoid where to small to lift the pen enough.
Language
English
