- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
Questions sur le concours Starter Kit Robotics 2012
12-14-2011 10:23 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
Bonjour,
Notre robot est particulièrement bancal. Est-ce le cas pour tout le monde? Cela influt beaucoup sur nos calculs et crée donc des erreurs. Y'a-t-il des réglages possible? Avez vous des solutions?
Nous avons installé un système d'entonnoir pour garder le cube entre nos pates, nous n'avons donc pas de bras. Sommes nous obligé de reculer pour prouver que notre cube est sur la cible ou pas? Nous ne tenons pas le rubik's cube donc en theorie nous n'avons pas besoin de le lacher...
Si on détruit le robot adverse en une seule fois, est-ce que ça nous fait un seul point de pénalité?
Combien d'équipe sommes nous? Allons nous affronter plusieurs robots? Pourrons nous détruire tous les robots?
Notre stratégie de jeu est-elle honnete? Mouahahaha
Cdlt 
12-23-2011 09:22 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
Bonjour,
Non, le robot n'est pas particulièrement bancal d'origine. Lui faire descendre les escaliers ou l'aider à avancer avec le pied peut en revanche entrainer ce genre de comportement. La solution serait probablement de voir quelle(s) pièce(s) est (sont) tordus pour éventuellement les changer.
Le cube devra être positionné correctement et rester 3 secondes sans contact avec le robot. Reculer serait donc une solution envisageable étant donné que vous ne le tenez pas...
Ceci sont des extraits du règlement :
"8) Évitement d’obstacles
Le robot ne doit pas attaquer l’adversaire et doit donc avoir un système d’évitement afin d’éviter le robot adverse et les obstacles éventuels."
"Le but du jeu sera de manipuler des Rubik’s Cube." (pas de briser les autres concurrents)
"Des pénalités peuvent aussi être appliquées dans les cas suivants :
- - déplacement du cube adverse
- - non-évitement du robot adverse
- - tout ce qui pourra être considéré comme relevant de l’anti-jeu" ("Des pénalités" donc pas forcément une seule)
Enfin, nous vous rappelons que cette compétition a pour buts (entre autres) de stimuler l'inventivité, d'inciter les participants à travailler en équipe et non à détruire le travail des autres. Il y a bien les compétitions de robots tueurs mais celle que nous organisons n'en est malheureusement pas une. Désolé 
Je vais apporter une petite précision au réglement afin d'ôter tout ambiguïté...
Bon courage!
Jérémy C.
NI France
01-06-2012 04:03 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
Bonjour,
Un fichier txt est fourni sur cette page https://decibel.ni.com/content/message/26719#26719.
Ce fichier est-il là à titre d'exemple ou bien est-ce le fichier définitif avec les 6 coordonnées qui seront utilisées le jour du concours?
Cordialement.
01-06-2012 04:25 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
Bonjour,
Le fichier fourni au lien que vous évoquez est un exemple pour vous montrer son format et sa taille finale. Les configurations contenues dans le fichier seront différentes le jour du concours. Pour rappel, voici une partie du règlement qui fait référence à ce fichier :
"6 configurations possibles seront fournies dans le fichier donné le jour de NIDays.
Chaque élément est séparé par une tabulation.
Pour exemple, vous trouverez avec ce règlement un fichier contenant 6 configurations (en fait 3 fois les 2 configurations proposées ci-dessus afin de respecter la longueur du fichier)."
Cordialement,
Jérémy C.
NI France
01-11-2012 02:24 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
Bonjour,
Où les encodeurs sont-il connectés sur la carte?
Merci,
Lucie
01-17-2012 06:04 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
bonjour,
je voudrais connaitre le poid du cube.
merci d'avance
01-17-2012 07:11 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
Bonjour,
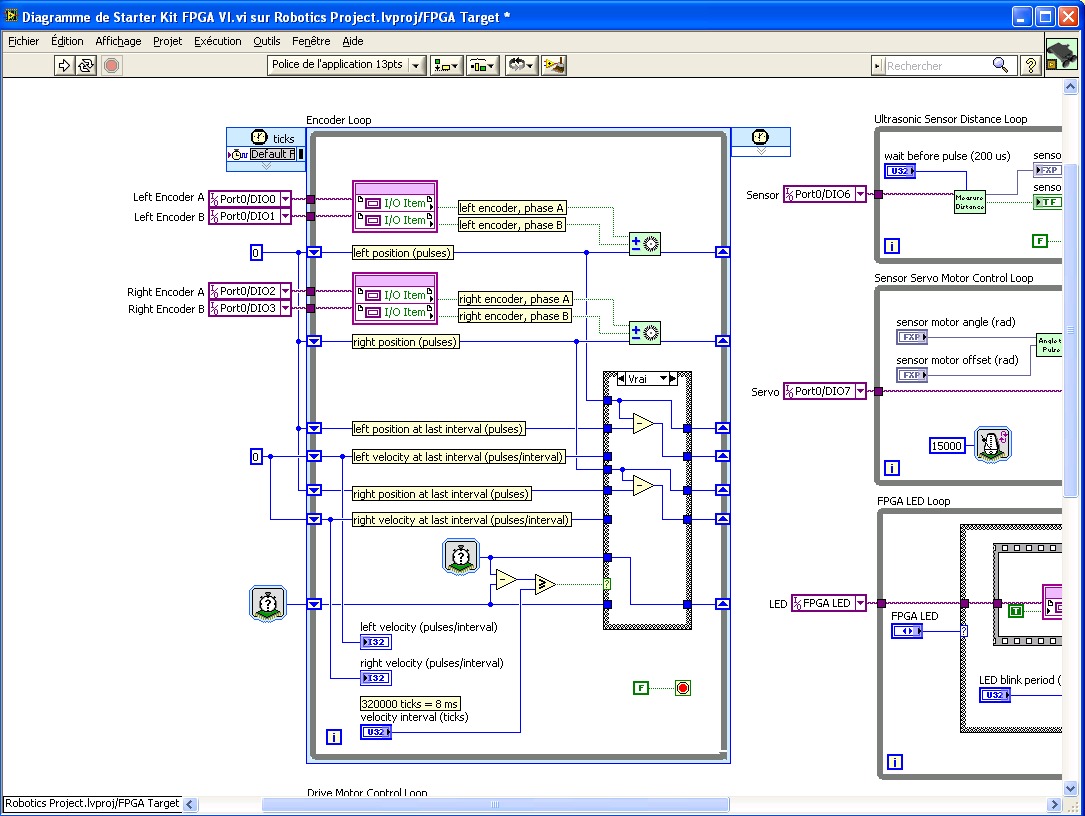
Vous pouvez suivre les 4 fils depuis le moteurs pour voir où ils arrivent sur la carte. Sinon, vous pouvez également voir depuis le VI "Starter Kit FPGA VI" quelles sorties sont utilisées pour l'encodeur. Ce VI est celui qui apparait sur le FPGA de la sbRIO lors de la création d'un nouveau projet de type robotique.
Cordialement,
Jérémy C.
NI France
01-17-2012 07:16 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
Bonjour Floblin,
Je n'ai pas vérifié le poids du Rubik's cube officiel mais celui que j'ai sur mon bureau et qui est du même type (3*3*3) pèse 110gr.
Je serais tenté de vous conseiller de prévoir un poinds d'environ 500gr afin de prendre en compte les vibrations, l'élan du robot, etc. Par sécurité...
Cordialement,
Jérémy C.
NI France
01-30-2012 07:30 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
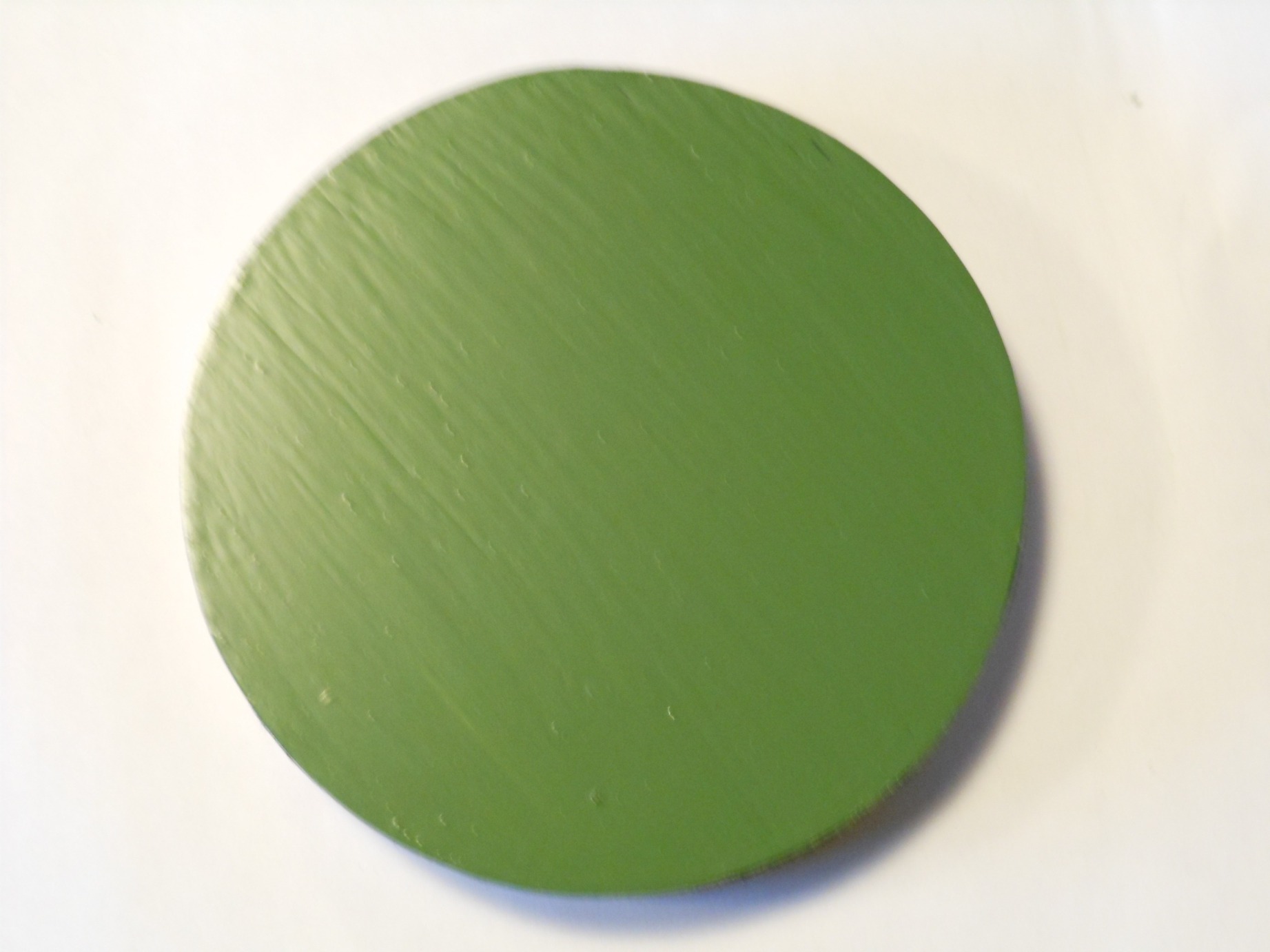
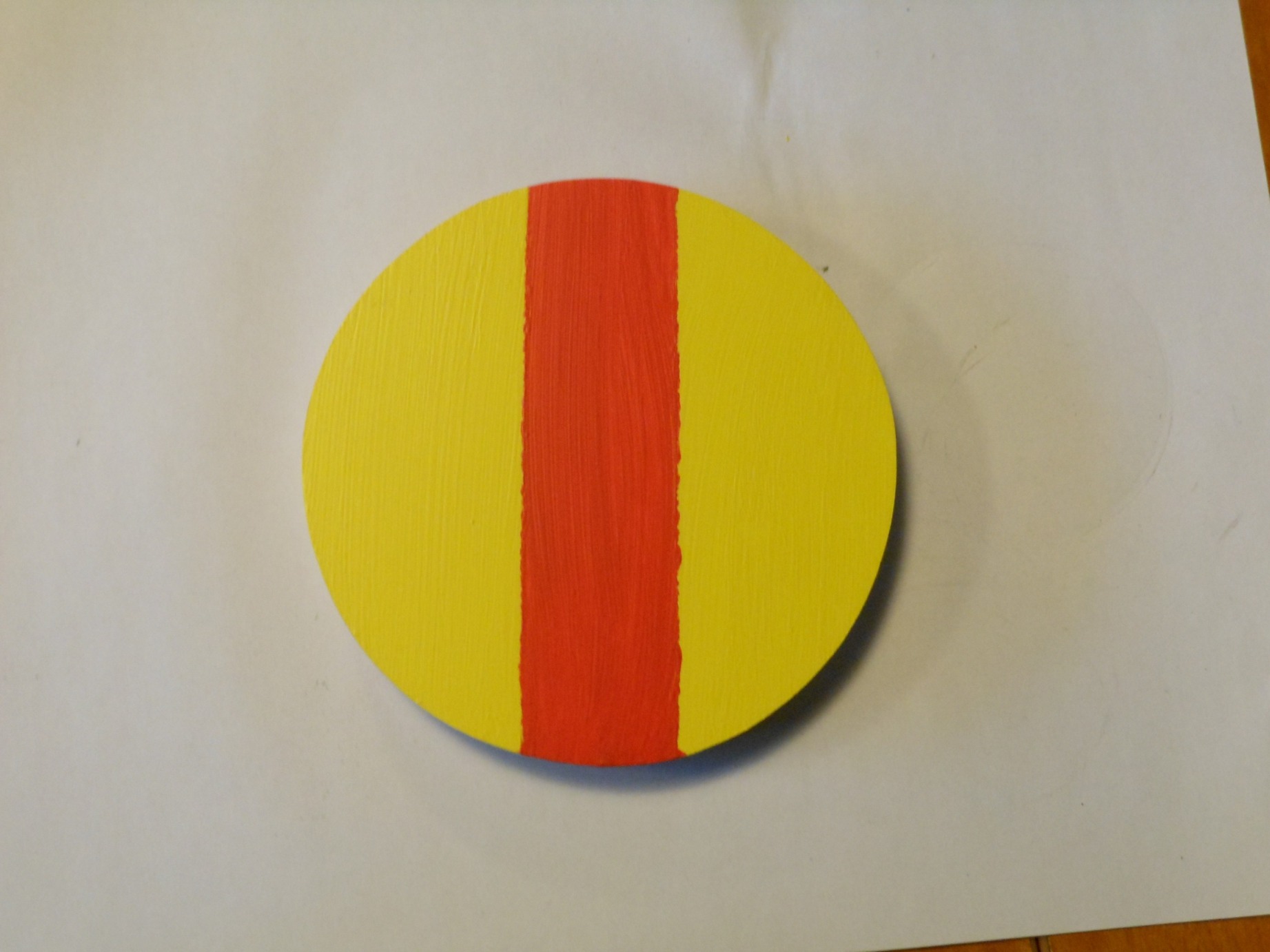
Bonjour à tous!
Voici des photos des différentes couleurs qui seront utilisées pour les zones où vous devrez poser le Rubik's cube. Vous pouvez ainsi commencer à faire des tests pour vous préparer davantage pour le 7 février. Bon courage!

Jérémy C.
NI France
01-31-2012 10:19 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
Bonjour,
Pour les étudiants qui n'auraient pas la possibilité de construire des exécutables (car ils n'ont pas la licence pour l'Application Builder), vous avez d'autres possibilités que celle de passer par un exécutable pour lancer une application à un moment donné (ici, le début de vos matchs). Vous pouvez par exemple tourner dans une boucle While tant que l'état d'un des switchs sur le robot n'est pas dans l'état que vous souhaitez puis vous servir de ce switch pour lancer l'exécution du reste de votre code et ainsi votre traitement. Je vous propose donc un exemple de déclenchement d'application que vous pouvez utiliser le jour du concours.
Vous trouverez joint un projet que j'ai construit avec LabVIEW 2011 qui contient un VI "Exemple". Dans ce VI, il y a le type de déclenchement que je viens de décrire avec l'utilisation du switch USER1 qui permet d'attendre indéfiniment dans une première boucle. Quand vous voulez lancer le traitement du reste du VI (dans mon exemple le clignotement de la LED USER), il vous suffit de changer la position du switch USER1.
Pour ceux qui ont la possibilité de construire des exécutables, vous trouverez la spécification de celui que j'ai construit à titre de test dans mon projet.
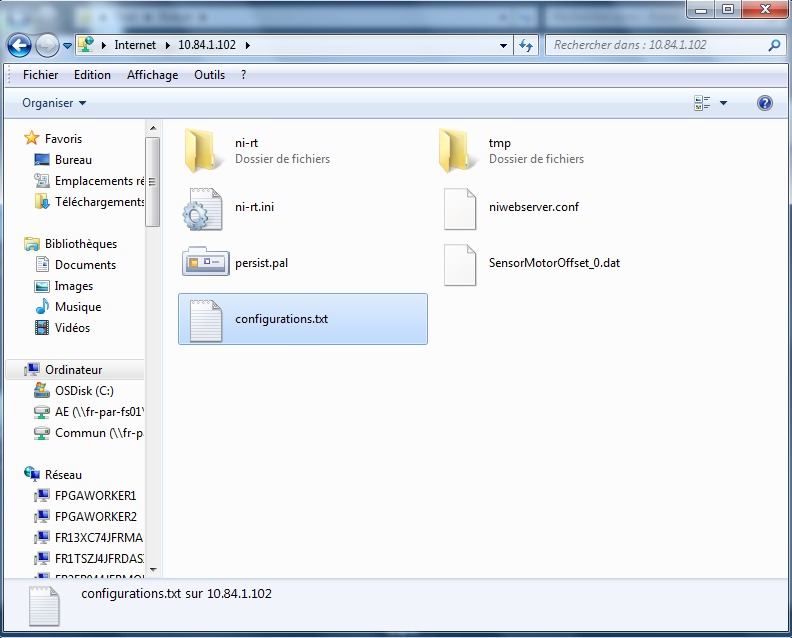
Enfin, pour l'ensemble des candidats, vous trouverez également un VI "Récup Infos Fichier" dans le projet joint. Ce VI récupère les données contenues dans un fichier txt au format de celui qui vous sera fourni le matin du concours. Les données sont récupérées dans un tableau et vous n'avez plus qu'à exploiter les données qui vous intéressent afin que votre robot interprète correctement la configuration choisie 5min avant votre match.
Pour le VI utilisé dans mon projet, le fichier "configurations.txt" a été copié sur la sbRIO (dont le nom de disque de stockage est "c") en utilisant le ftp de la cible. (Pour information, vous pouvez accéder aux données présentes sur le disque de la sbRIO en tapant "ftp://10.84.1.102/" ou "10.84.1.102" est l'adresse de mon robot)
N'oubliez pas, le jour du concours, pour effectuer des modifications de programme sur votre robot, vous serez connecté au robot en liaison directe (sans passer par un réseau). Pensez donc à configurer votre robot de sorte à ce qu'il soit sur le même sous réseau que votre (vos) PC portable(s) et que vous puissiez donc directement le détecter et charger des applications dessus.
Bon courage!
Jérémy C.
NI France
