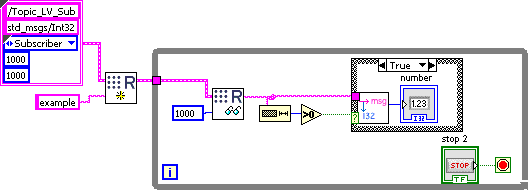
My topic is good (green check) records After a second unregisters (check brown), if I publish with rqt, labview susbcribe not any data.
However, if I publish first rqt, the topic is always registered, but if I stop publishing, unregisters labview and not recorded again.
I want to start ros without having to publish in a loop.
www.elblogroboticodepedro.tk
