- Subscribe to RSS Feed
- Mark Topic as New
- Mark Topic as Read
- Float this Topic for Current User
- Bookmark
- Subscribe
- Mute
- Printer Friendly Page
USB Camera not showing up on dashboard
02-13-2015 09:57 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
i have been having troubles with getting the microsoft hd 3000 usb camera to show up on the dashboard can anyone tell me step by step how they got thirs working?
02-13-2015 05:38 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
Hi Jeringo,
What steps have you done so far to make sure the camera is working?
When you deploy your code, do you see any errors related to the Vision Processing.vi?
You will want to check the roboRIO WIF to make sure the camera is even being recognized. When connected to the roboRIO over USB, go to 172.22.11.2 in your browser and make sure the camera is visible.
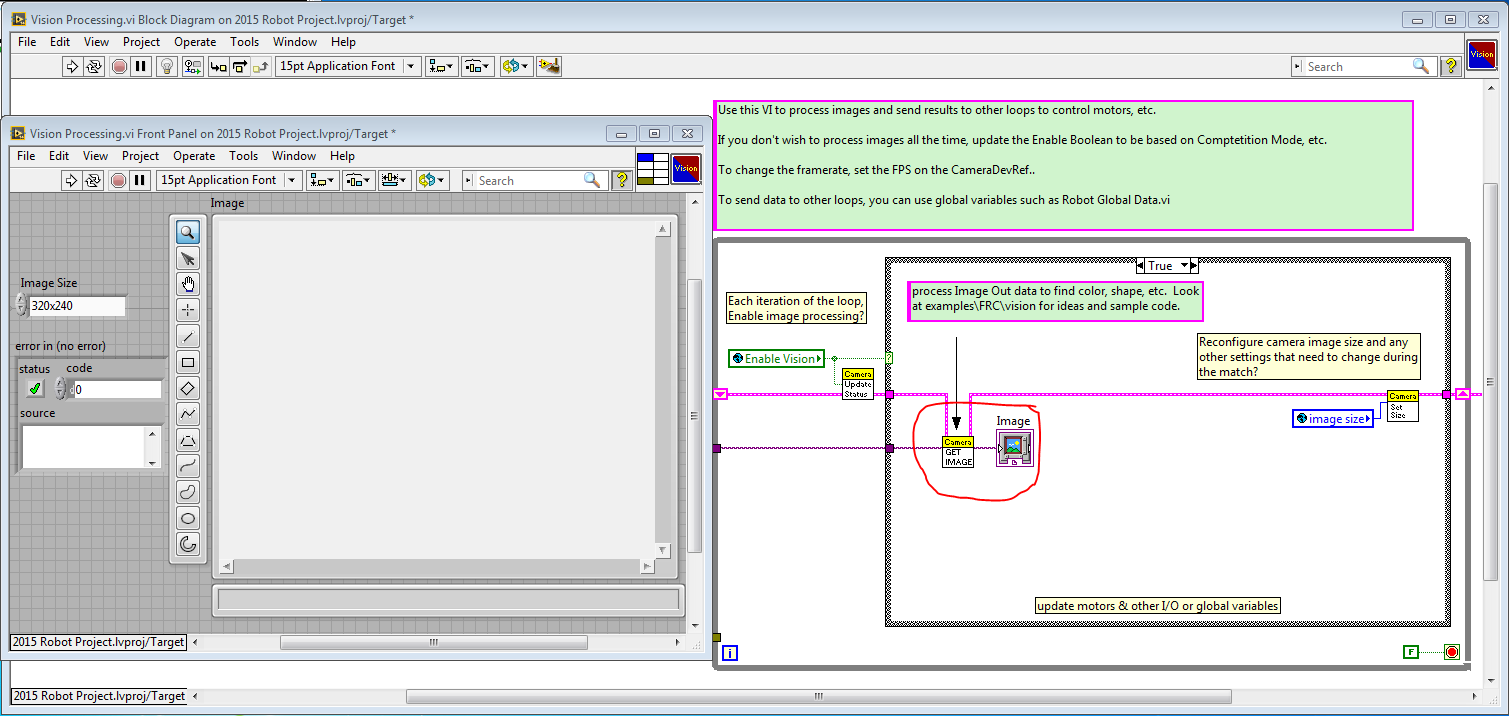
To make sure you are actually getting video, probe the New Image wire in the Vision Processing.vi (part of the 2015 Robot Project). This wire should be between the IMAQ Create.vi and the WPI_CameraGetImage.vi. If you do not see an image in the probe window, you will probably need to change the USB port in the VI. I think default is set to USB 0.
Initially when I was testing this camera (and could see the image using the probe) I also could not see the image in the Driver Station. The only thing I changed was closing the Driver Station and opening it up again. You also want to make sure the Dashboard is either set to USB Camera HW or SW, and vision is enabled on the front panel of the Robot Main.vi.
Applications Engineer
National Instruments
02-14-2015 12:55 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
I seem to be having the same problem as Jeringo. I've checked to make sure my camera is recognized when connected to the robioRIO over USB. However i'm still not able to see the camera feed from my dashboard. When I deploy the code to the roboRIO I get these error messages: ERROR-1074360311 occured at IMAQdx Open Camera.vi and NI-IMAQdx: (Hex0xBFF69009) Camera not found . Ive also tried enabling vision on the Robot Main VI front Panel.
02-14-2015 05:18 PM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
i've enabled vision on the robot main vi, then set the camera to cam0 which is what is says on the html interface and i got an error 40003 and 40005. when i traced those it went to a notifier that was getting hung up somewhere else.
02-16-2015 11:59 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
Hostilegato:How are you checking to make sure the camera is recognized by the roboRIO? It sounds like that error could be caused by no specifying the correct USB port for your camera, and thus it is not being recognized by the software. In the Vision Processing.vi in your 2015 Robot Project, check the left most section of the Block Diagram for that VI. You should see something like USB 0, True Constant, and axis.camera.local all connected to a Selector. If you are using USB, you may want to change that USB 0 to USB 1 and see if that helps. If you are using an Ethernet camera, you will need to change the True Constant to a False Constant and axis.camera.local to the IP address of the camera.
Jeringo: Was there any information that came with those errors? Do you specify the camera as cam0 in the Vision Processing.vi? If so, you will need to change that to either USB 0 or USB 1. The WPI_CameraOpen.vi will only recognize the USB port name to create the reference to the camera.
Have you been able to create an indicator for the Vision Processing.vi to check to make sure you are getting video in the code? Here is a quick way to do that. All you need to do is add an Image Display indicator to the front panel of the Vision Processing.vi. Double click the Image Display and it will take you to its location on the Block Diagram. You can then wire the Image Out from the WPI_CameraGetImage.vi for the Image Display. When you deploy the code to the robot, keep the Front Panel of the Vision Processing.vi open, and this should help you narrow it down to either the code or the Dashboard that is causing the problem.
Applications Engineer
National Instruments
03-03-2015 07:59 AM
- Mark as New
- Bookmark
- Subscribe
- Mute
- Subscribe to RSS Feed
- Permalink
- Report to a Moderator
From our experience at the Dallas Regional, do NOT change the "axis.camera-local" to the camera IP address. Because the network operates dynamically instead of from static IP addresses this year, you will lose functionality when you connect to the field driver station. Instead, follow the instructions at WPI (https://wpilib.screenstepslive.com/s/4485/m/24194/l/144985-configuring-an-axis-camera This will minimize problems, particularly once the bridge is reset for competition.
