- Document History
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
Title: Autonomous 4-wheeled Colour Detecting Rover Robot
Overview of what project is:
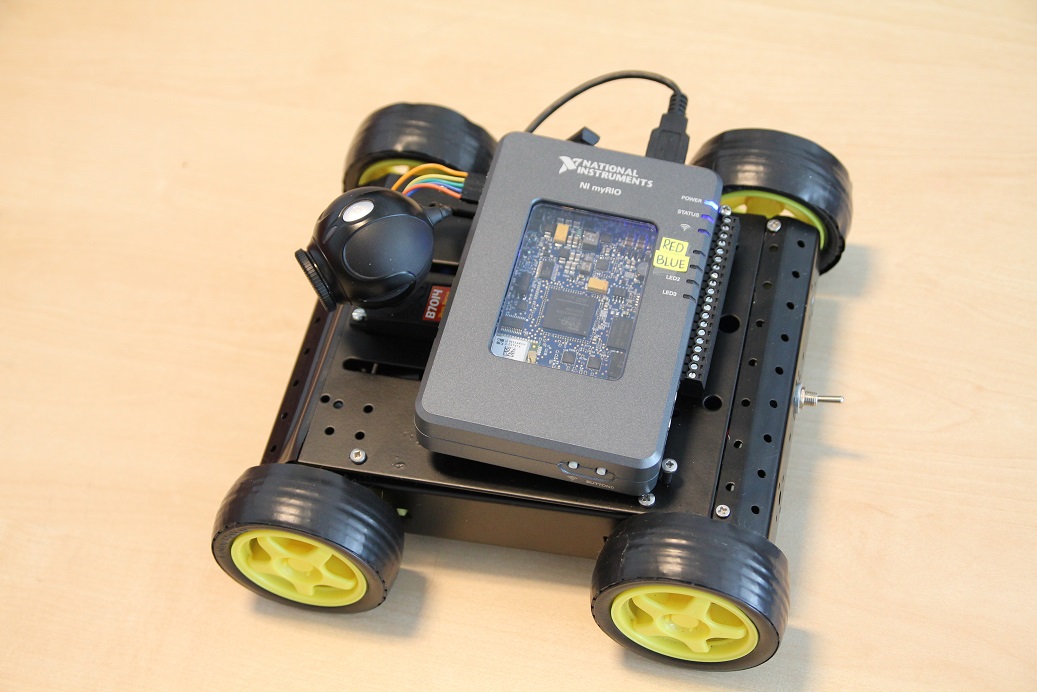
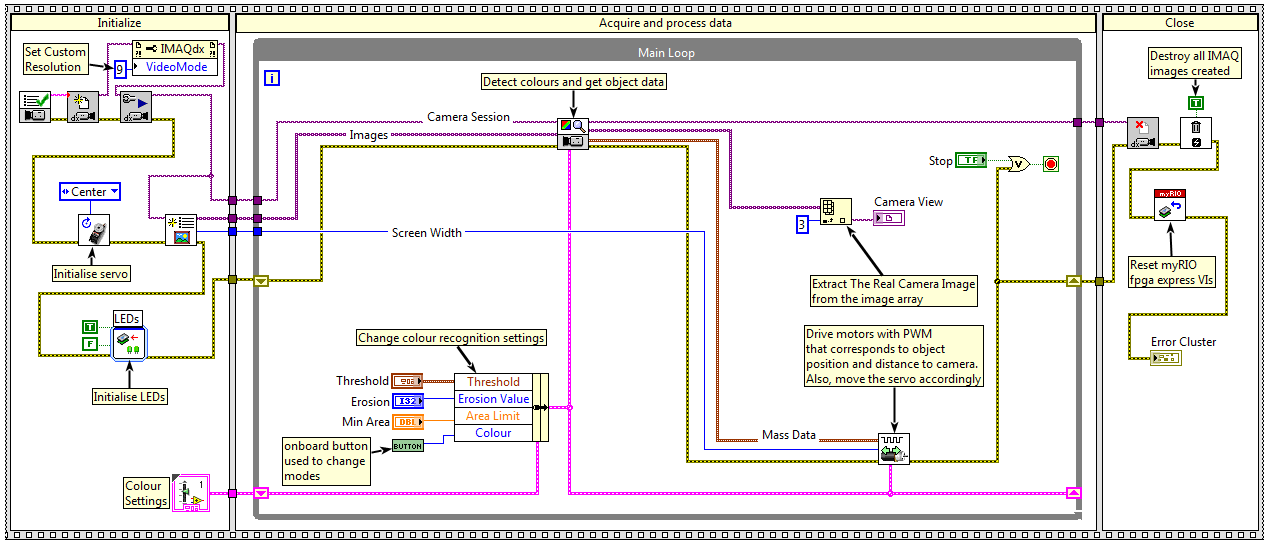
This project is an autonomous 4-wheel robot capable of doing colour recognition in real-time. The rover does image processing on a camera’s video stream and then decides on its movements accordingly. It is able to detect two different colours (red or blue) and then track them. Once robot gets close enough to the object it stops and if the object is too close it will try to run away from it. This rover is a great example of how to use LabVIEW’s Vision toolkit to develop robust image processing applications that are widely used in the industry and academia from auto-processing plants to research of robotics. Furthermore, the colour-following robot can be easily used as a platform to test and learn more advanced image processing such as face detection or specific pattern-matching as the code used for camera input, motor control and servo movements is modular, easy to use and adapt.
Picture of project:
Video of project:
Parts List:
No. | Part-Name |
1 | SainSmart 4WD Drive Robot Platform |
2 | Trust WB-6250X Webcam |
3 | General Hobby Servo motor |
4 | LifePO4 4000mAh battery |
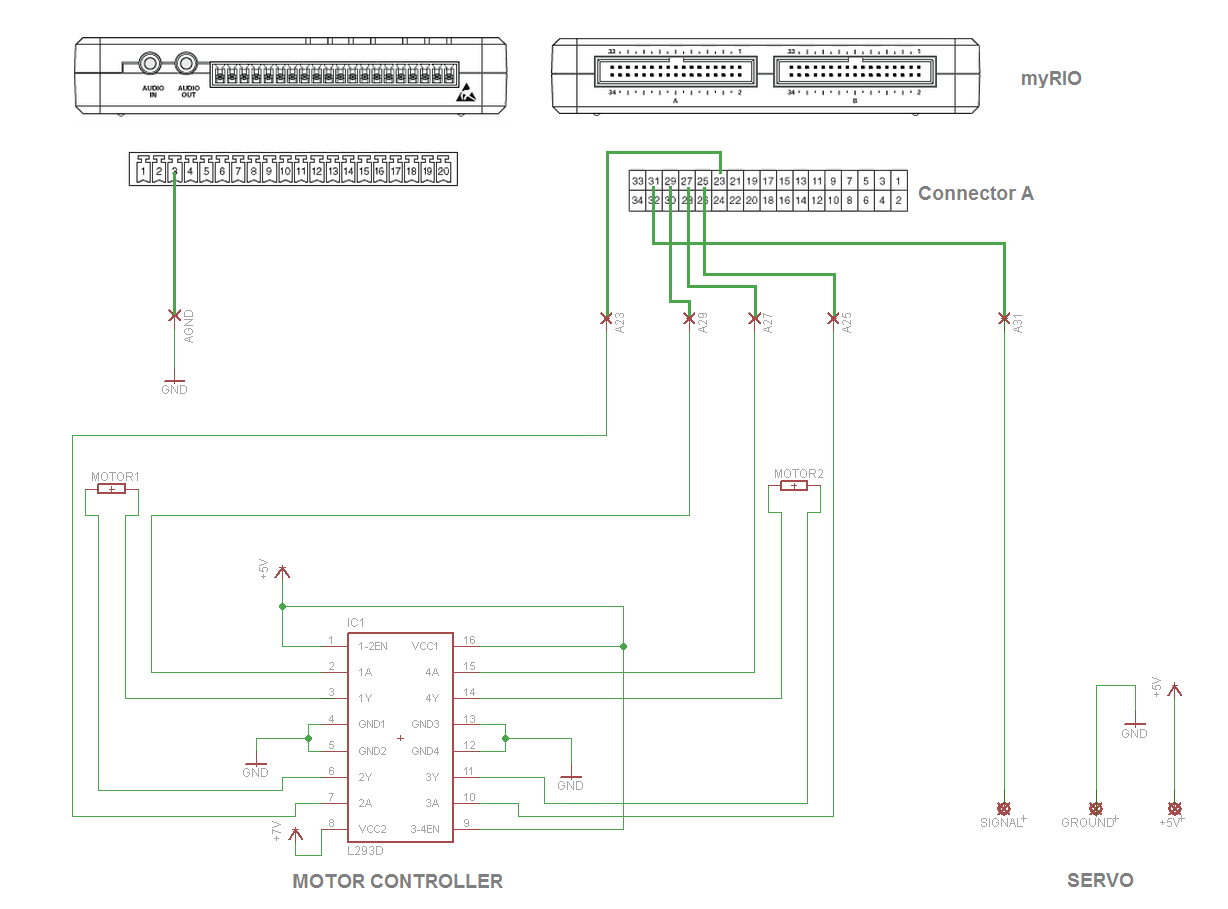
5 | Full-Bridge Motor Driver Dual - L298N |
6 | myRIO |
Wiring Diagram:
Version of LV: LabVIEW 2013 + IMAQ Toolkit
Mark N
Applications Engineer
National Instruments UK & Ireland
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Can you buy this product? How much is it?
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
hi.respected sir i need your help about my project which is based on object tracking and pointing system.can you send me Documents which is you used in the Autonomous 4-wheeled Colour Detecting Rover Robot i don't want to make the Robot am just implement pan/tilt mechanism with my camera in my project to track the colored object. In Autonomous 4-wheeled Colour Detecting Rover Robot you using only one servo motor which is rotate the camera only horizontally.i want to move my camera vertically too. so i need your help which is another .vi used to move camera vertically or what any other changes done in existing .vi to move the camera vertically.because i used two servo motors.Thanks .Qasim ali
