From Friday, April 19th (11:00 PM CDT) through Saturday, April 20th (2:00 PM CDT), 2024, ni.com will undergo system upgrades that may result in temporary service interruption.
We appreciate your patience as we improve our online experience.
From Friday, April 19th (11:00 PM CDT) through Saturday, April 20th (2:00 PM CDT), 2024, ni.com will undergo system upgrades that may result in temporary service interruption.
We appreciate your patience as we improve our online experience.
University: The University of Manchester and The University of Leeds, UK
Team Members (with year of graduation): Maria McKavanagh, Martin Schuster, Joseph Northwood, Roberto Fernandez Bautista, Sertunc Tuncel, John Waymont, Stephen Alderman, Giorgio Peacock, Sarah Griffiths, Tommy Yip, Ruth Coe and James Sykes (all graduate 2013)
Faculty Advisers: Dr Danielle George, Mr Peter R. Green, Dr Peter Culmer and Professor Martin Levesley.
Email Address:maria.mckavanagh@student.manchester.ac.uk and mn09cmty@leeds.ac.uk
Submission Language: English
Title: The ARTEMIS Project
Autonomous Robotic Technology Enabling Minimally Invasive Surgery
Description:
The ARTEMIS project investigated the feasibility of using swallowable autonomous robots for minimally invasive surgery. The project explored key underpinning technologies including: power harvesting, biomedical sensing, actuation, wireless communication and networking. A technology demonstrator, based around a gastric surgery use case, implemented a 6:1 scaled surgical capsule capable of communicating with a body-worn base station and an actuated model of the stomach to provide a test bed for the surgical robot.
The system was designed and built by students from two universities; seven electrical and electronic engineers from The University of Manchester and five mechanical engineers from The University of Leeds. Thus far there have been approximately 500 views on the ARTEMIS blog, and 1021 views on the website from six different countries (figures correct as of 8th May 2013). The ARTEMIS project website has been retweeted by New Scientist magazine, the Massachusetts Institute of Technology (MIT) Tech Review magazine and the manufacturer of the Rascal Micro which was used in the development of the base station.
Products (NI)
LabVIEW 2012 with Modulation Toolkit, MathScript RT Module and Digital Filter Design Toolkit; NI myDAQ; NI-USRP 2920; NI USB-8451; NI Data Dashboard 2.0; NI c-RIO 9014 controller; NI c-RIO 9114 Chassis and NI-9403 modules.
Products (Other)
Linear Technology LTC3588-1 IC; Freescale MMA7455 digital accelerometer module mounted on Parallax Inc. MMA7455 board; Betatherm 100K6A1B temperature sensor; Anritsu MS2036A Vector Network Analyser; Texas Instruments CC1101SmartRF04EB evaluation board; Smart RF Studio; NETGEAR gigabit switch; PIC18LF25K22 microprocessor; Solidworks; VariCAD; Rascal Micro; Python; MPLAB; Apple iPad; TCS M400S-180 centrifuge pump; TCS M200S-180 pump; Bio-Chem Fluidics 100P2NC12-0 2-way normally closed pinch valve; FlexiForce sensor; UTAH Deltran II pressure sensor; RS 28mm stepper motor; Automation Studio fluid power systems software; Dell tablet.
The Challenge
Minimally Invasive Surgery and Diagnosis (MISD), often referred to as keyhole surgery, is currently an active area of research within both public and private healthcare services worldwide. Post-operative surgical infections still persist, having large repercussions on the healthcare system [1]. In the UK, one of the areas facing potential cuts to expenditure is the National Health Service (NHS), with efficiency savings targets set at £15bn to £20bn by 2015 [2]. With post-operative surgical infections currently costing the NHS £930.6m per annum [3], this is one area where investment and research in MISD could benefit the NHS and help these savings to be realised.
Investigating methods of minimally invasive surgery that do not require surgical incisions, that is entering the body via a natural orifice, could offer a solution to surgical site infection (SSI) [3] and post-operative readmission within the NHS. Complete removal of external incisions removes harmful exposure to bacterial particulates, and would present a significant improvement to NHS patient care and contribute to the total savings. A system that is entirely swallowable, and capable of passing out of the body naturally, could remove the need for external incision for the patient and provide the same surgical capabilities and monitoring which could shape the next generation of patient healthcare.
The ARTEMIS project vision is for micro-miniature autonomous robots to be routinely performing surgical operations administered through naturally occurring orifices and monitoring post-operative recovery within the next twenty years. This has been summarised in the image below, showing the key steps associated with the Project Vision.
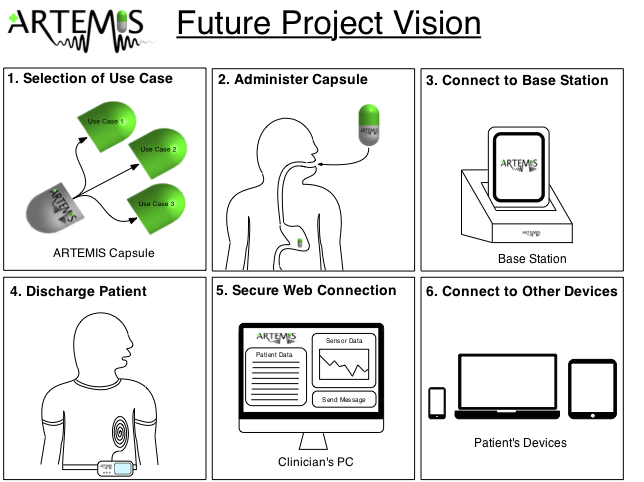
Figure 1: ARTEMIS Project Vision
Each of the numerical steps in Figure 1 have been described below.
The Solution
In order to exploit parallelism throughout the ARTEMIS project, the team was divided into 6 sub-teams; power harvesting, biomedical sensing, communications, base station, gastric balloon development and actuated test bed development. Adding to the complexity of the project, the sub-teams were split between two universities; The University of Manchester and The University of Leeds in the UK.
The four sub-teams form The University of Manchester incude:
The two sub-teams form The University of Leeds include:
Introduction to The University of Manchester Sub-Teams
The four subteams from The Unviersity of Manchester have been introduced in the form of a five minute summary video, which outlines the challenges and achievements of each of the sub-teams.
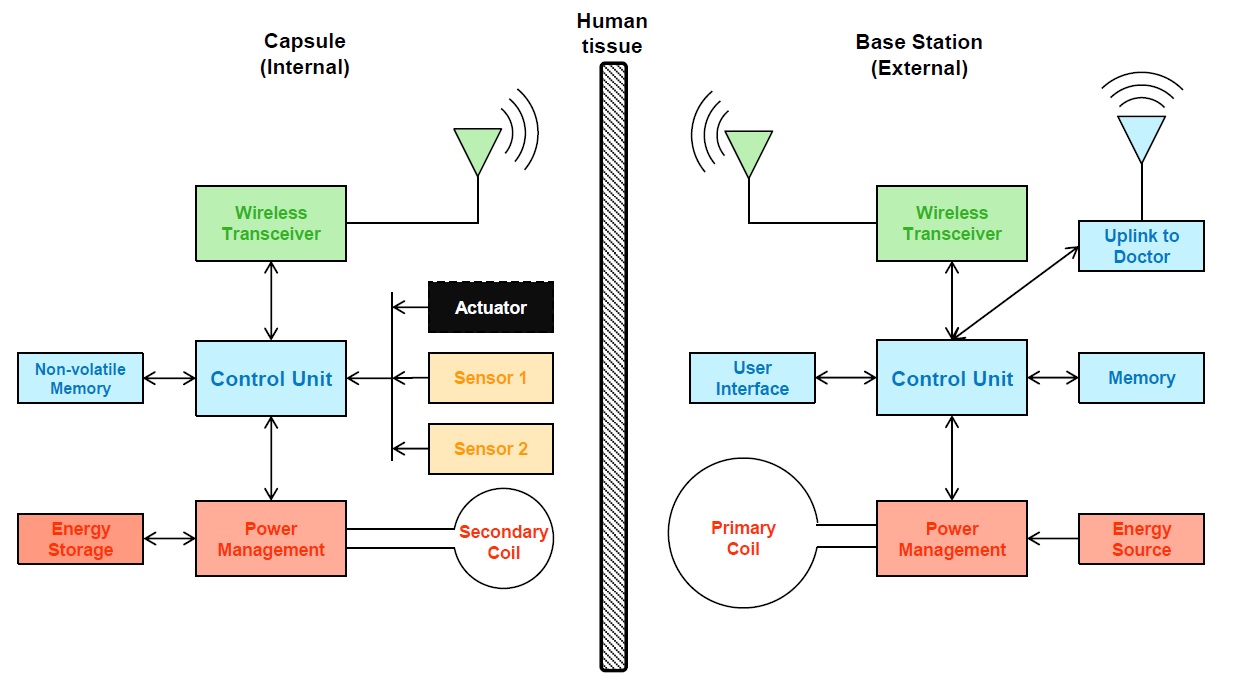
Figure 2: System Overview Diagram Video 1: ARTEMIS Team Introduction Video
Biomedical Sensing
A sensor interface has been successfully designed, implemented and validated. To address future needs, and recognising the five, ten and twenty year technology horizons, sensor flexibility, configurable analogue signal processing and power management were key features in the design. These features have been demonstrated using the analogue temperature sensor and the digital 3-axis accelerometer sensor which have been integrated into the prototype surgical capsule.
Using a National Instruments USB-8451 I2C interface, the 3-axis accelerometer values were imported into LabVIEW, where the values could be plotted and visualised, to represent patient activity and capsule orientation within the stomach. This orientation is necessary to understand when to deploy the gastric balloon, and the accelerometer data is required to understand the daily activity of the patient. The activity of stationary, walking and jogging can be mapped using a graphical interface in the LabVIEW environment. The following video explains the sensor interface and demonstrates the accelerometer operation in a 3D LabVIEW visualisation.
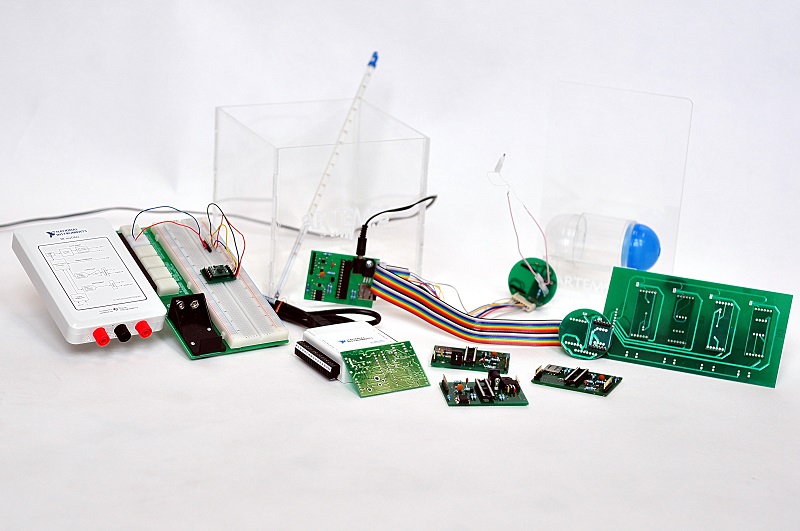
Figure 3: Sensor Team Hardware Video 2: Sensors Team Video
Power Harvesting
After a comprehensive review of available technologies, it was decided to implement an inductive charging system to wirelessly charge the capsule inside the patient. Focusing on the principal use case of a portable primary coil, different geometries and coil structures have been investigated to satisfy the portable nature of the coil. A test rig was designed to allow different primary (external) coil and the secondary (receiver) coils to be tested, and increment distance and orientation, to replicate the misalignment of the coils once the capsule is swallowed.
The challenges of orientation and localisation were overcome through the use of a 3-axis coil system. The design of the primary oscillator circuit outlined the difficulties in driving inductive loads from operational power amplifiers, meaning that several iterations of the primary oscillator were required before settling on the Linear Technologies LT1210. This was capable of driving up to 1.5 A of current through the primary coil, delivering a total of 20 Vp-p to the through-body system.
Different methods of managing the received power have been investigated, focusing on several ICs that performed the required operation. After implementing and testing different ICs, it was concluded that the Linear Technologies LTC3588 would harvest the energy from the inductive power transfer link. This energy was then stored in a 200 µF super-capacitor, used as a charge reservoir integrated into the final system, on a 6:1 scale, providing a successful method of storing charge within the capsule.
Overall, the wireless power transfer system sucessfully induces 25 mW of useful power, through-body to a 1:1 receiver coil, which harvests the energy using an LTC3588, to enable the capsule to continue its operation without the need for batteries or a connected power supply.

Figure 4: Power Team Hardware Video 3: Power Team Video
Communications
The communication sub-team developed and characterised a through-body bi-directional wireless communication system, to enable the transfer of data between the in-body capsule and the body-worn base station.National Instruments Universal Software Radio Peripherals 2920 (USRPs) were used to prototype and characterise a range of modulation schemes, for the through-body wireless link.
The results showed the best operating frequency to be 433 MHz and the most power efficient modulation scheme was Binary Phase Shift Keying (BPSK). This was implemented using a Texas Instruments CC1101 radio frequency interface circuit, operating at 433 MHz within an Industrial, Scientific and Medical Band. The CC1101 wireless transceiver was capable of achieving data rates of up to 600 kbps at acceptable bit error rates, and this was more than sufficient to deliver the sensor data rate requirement of 4 kbps.The custom designed embedded communication system has demonstrated good performance even through human tissue simulants, such as porcine tissue.
Overall, this shows that the power efficiency of the integrated communications system has been optimised, in order to maximise the data rate and reduce the bit error rate. The flexibility offered by NI USRPs was used to compare different modulation schemes and power requirements, to implement an efficient bi-directional wireless communications system, through human tissue.
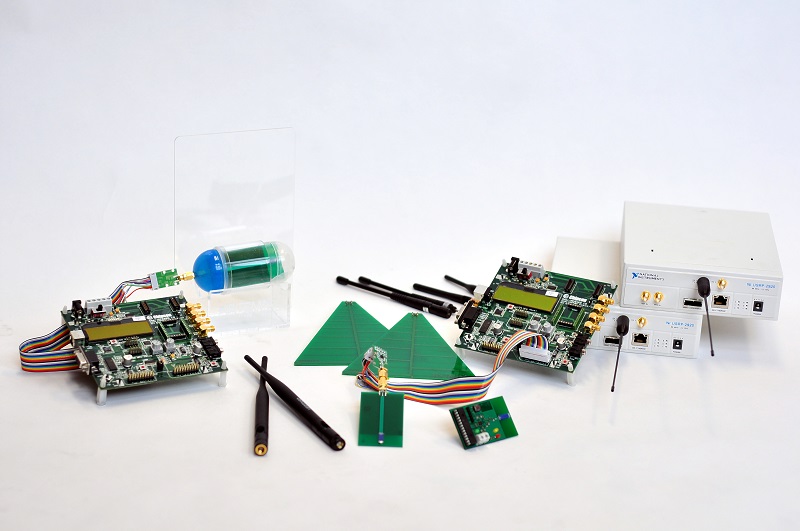
Figure 5: Communications Team Hardware Video 4: Communication Team Video
Base Station
The base station is a body worn device capable of communicating with the capsule and sending biological sensor data to the patient and clinician. The data is wirelessly transmitted to a secure web-interface, to allow capsule data to be seen from any web-enabled device. A portable body-worn embedded system has been designed and implemented, acting as a bridge between the user and the capsule. This has been achieved by successfully integrating discrete hardware in the form of a Rascal Micro, an online web application user interface to visualise the capsule data, as well as a USB wireless adapter to make the device truly portable.
A customised PCB was designed to integrate all of the hardware within a bespoke Perspex enclosure, to create a user-friendly and body-worn device. In addition to this, a secure web-interface has been designed and implemented, to allow the clinician access to the biological sensor data and relevant activity monitoring, in order to make informed disagnoses about the patient's condition. This also allows remote operation of the capsule, and allows the clinician to schedule appointments with the patient, that will appear on their mobile devices through the custom designed Patient interface, and create an alert on the base station through the incorporation of integrated hardware, such as buzzers, vibrational motors and the LCD screen.
Overall, the base station sucesfully enables the patient and clinician to interpret and receive internal capsule data, as well as acting as a secure web-server to deliver the biological sensor data to their web-enables portable devices.
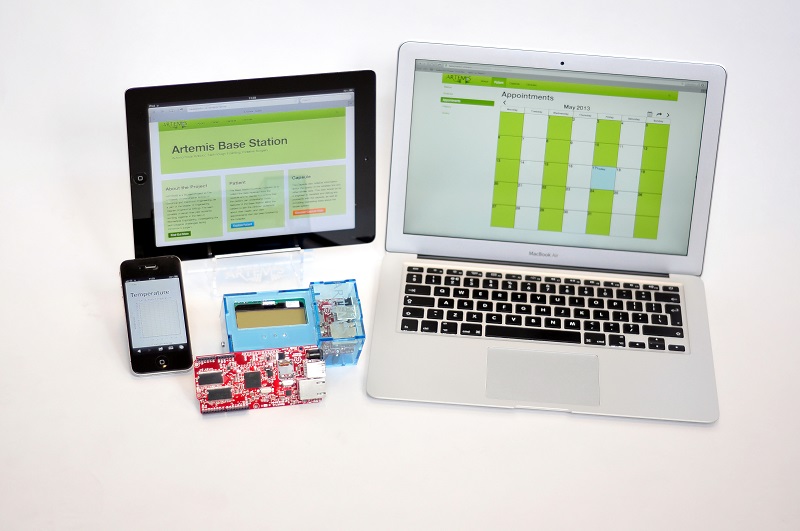
Figure 6: Base Station Hardware Video 5: Base Station Video
Power Planning Tool
The Power Planning Tool is a program to estimate the power consumption of the capsule for different scenarios in different use cases. The Power Planning Tool uses National Instrument's Data Dashboard version 2.0 on an iPad to enter the parameters for power sources and active devices in the capsule system. The current energy level of capacitor and batteries within the capsule are illustrated and power budget of the capsule adjust dynamically, when changing the input parameters. The operation of the Power Planning Tool is illustrated in the following video.
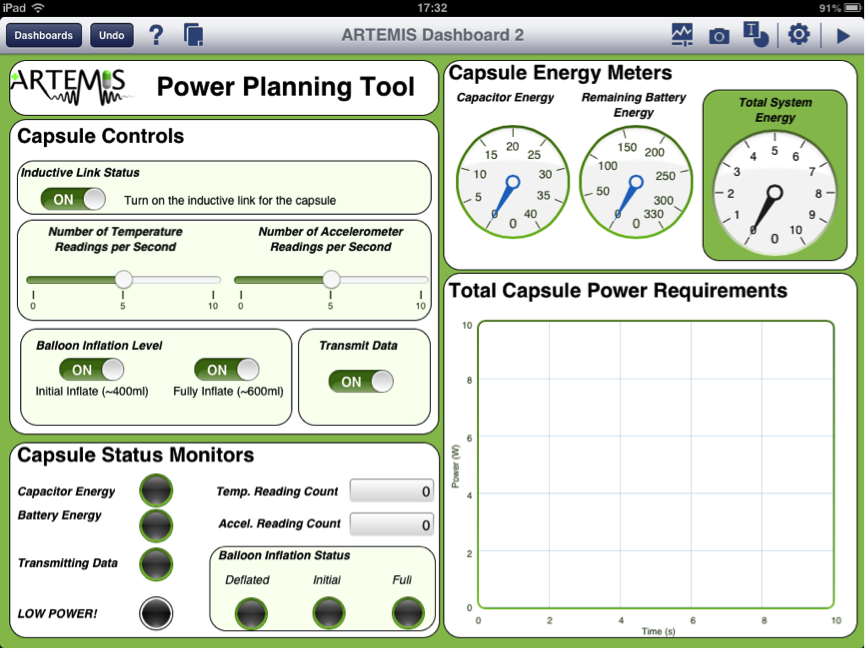
Figure 7: Power Planning Tool Video Video 6: Power Planning Tool Video
Gastric Balloon
A tethered 6:1 scale model of the gastric balloon capsule robot has successfully been manufactured and tested, and shows the design is feasible. The capsule is actuated using a pump system which inflates the balloon to 500 ml then deflates via a pinch valve by 25% to reduce the pressure of the balloon on the stomach lining, then re-inflates the balloon to its full capacity. The pump and valve are controlled using LabVIEW software. The program was developed using time sequences to turn the pump and pinch valve on and off sequentially, enabling the inflation and deflation to be accurately controlled. The control program itself is shown in Figure 10. The timings were optimised during the testing phase of the capsule development. The control program was connected to the pump system using a CompactRIO and a MOSFET circuit, which used logic voltage to turn the pump and pinch valve on and off. Figures 8 and 9 show details of the capsule design and pump system.
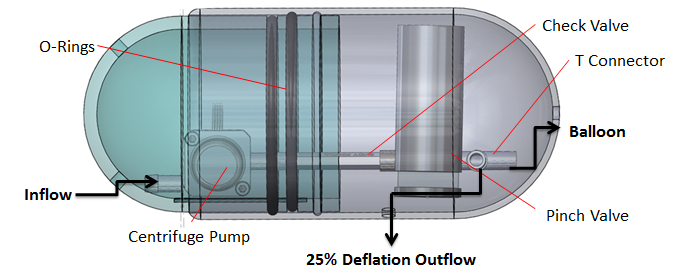
Figure 8: SolidWorks Image of Capsule Design and Pump/Valve System
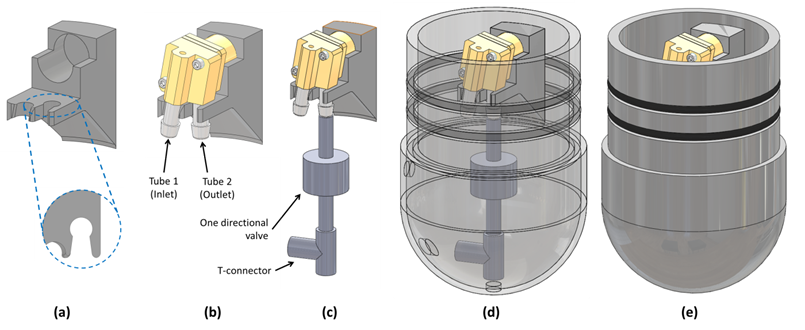
Figure 9: SolidWorks Image of the Pump Mount Inside the Capsule
Figure 10 shows the flowchart for the inflation and deflation of the gastric balloon.
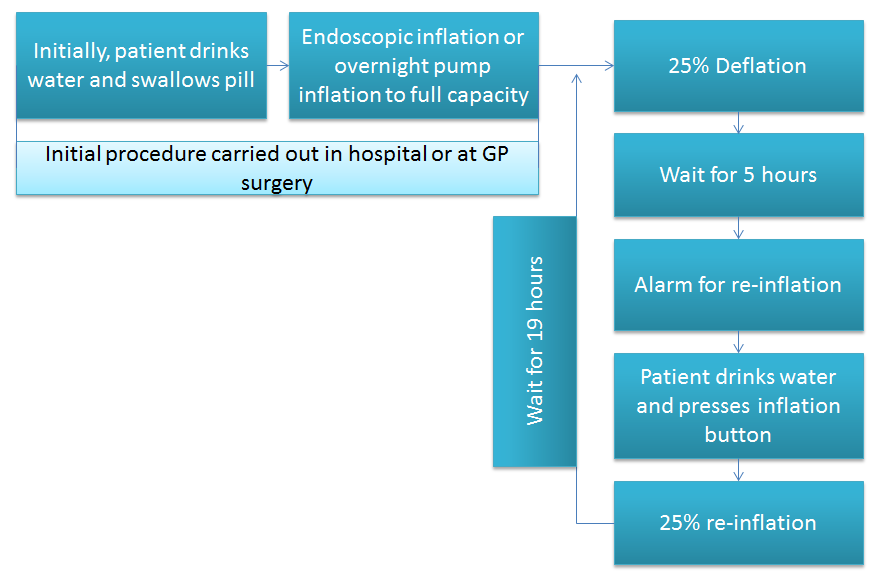
Figure 10: Flowchart Showing Inflation and Deflation of Balloon System
A copy of the LabVIEW program used to control the pump and pinch valve has is attached to the document.The following video shows the inflation and deflation of the balloon with the 6:1 scale model of the capsule using the LabVIEW program.
Video 7: Inflation and Deflation of Gastric Balloon
Actuated Test Environment
A model stomach was created by 3D printing a CAD model of the stomach to use as a mould and using liquid latex to create a thin walled model. This was then actuated using PET bands actuated using stepper motors. These bands were arranged as shown in Figure 11.
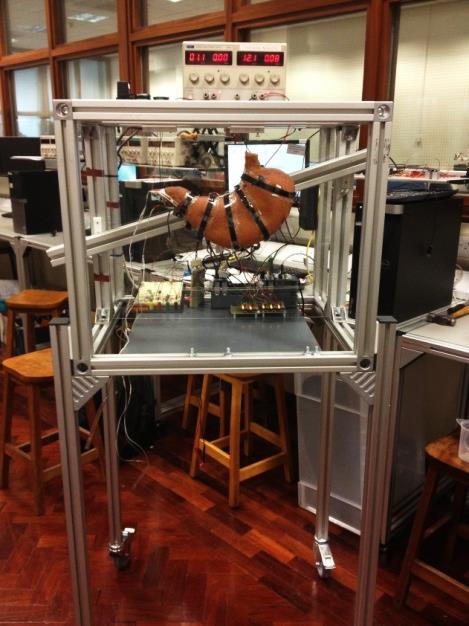
Figure 11: The Test Environment with the Stomach Model and the five Actuation Bands
A NI CompactRIO was used to interface with an EasyDriver v4.4 stepper motor driver board (https://www.sparkfun.com/products/10267) in order to control the stepper motors. This board is based around the Allegro A3967 driver chip, which translates two control inputs to the signals required in order to turn the stepper motor. These two inputs are direction (DIR), which defines the direction of motor rotation, and STEP, which causes the motor to take a step in the defined direction on a LOW-HIGH logic transition. Custom PCBs were designed in order to configure the other inputs to the board, as it was not required to change these programmatically. A flow chart of the program is attached to the document.
Flexiforce sensors and a UTAH Deltran II pressure sensor were used to measure the contraction force on the test environment and the pressure inside the inflated intragastric balloon. National Instruments data acquisition hardware and software were used to collect data from both of these sensors. The following video shows the contraction of band three on the test environment, showing some occlusion but not the complete desired occlusion.
Video 8: Contraction of band three sensors
The Integrated System
The integrated system uses the biomedical and inertial sensors within the 6:1 scaled surgical capsule, to monitor the capsule surroundings and ensure optimum orientation for the deployment of the gastric balloon. Sensor data is sampled at 4024 bps and transmitted to the external base station using a Texas Instruments CC1101 at 433 MHz. This data is received through another TI CC1101 radio frequency interface circuit, to process the data and upload it to a secure web-server for the clinician and patient to view on their web-enabled devices. Real-time sensor data can be shown on the secure clinician interface, with appointments and diagnoses appearing on the body-worn base station. The integration of the capsule with all the relevant electronics modules and the fabrication of the capsule itself are summarised in the video below.
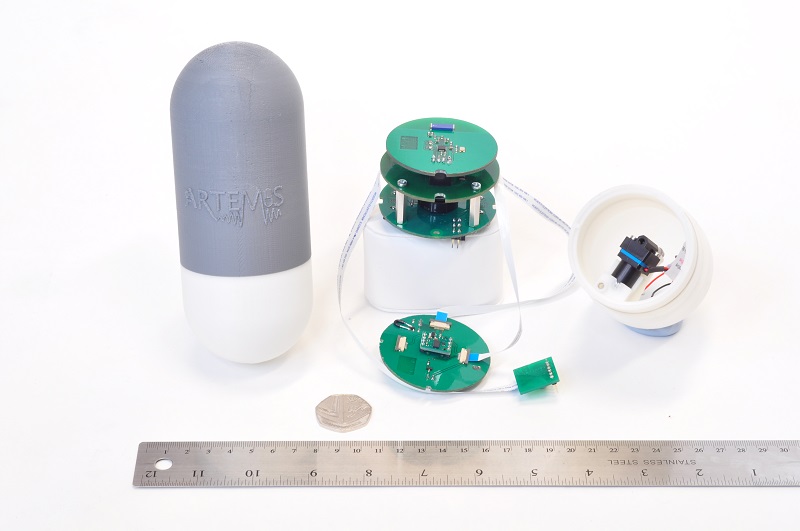
Figure 12: Integrated Capsule Hardware Video 9: Integration Capsule Video
Two use cases have been explored within the scope of this project; a gastric balloon use case, and an inductive charging use case. Integrating this into an interchangeable capsule base, the gastric balloon can be remotely inflated and deflated using the secure clinician interface, and the inductive charging module allows the capsule to operate without any batteries or external power connected to it. The concept behind the interchangable capsule model is to allow future use cases and new sensors and actuators to be implemented, using the same core electroincs modules in the capsule and the same base station. The two different use cases and the final system demonstration are summarised in the video below.
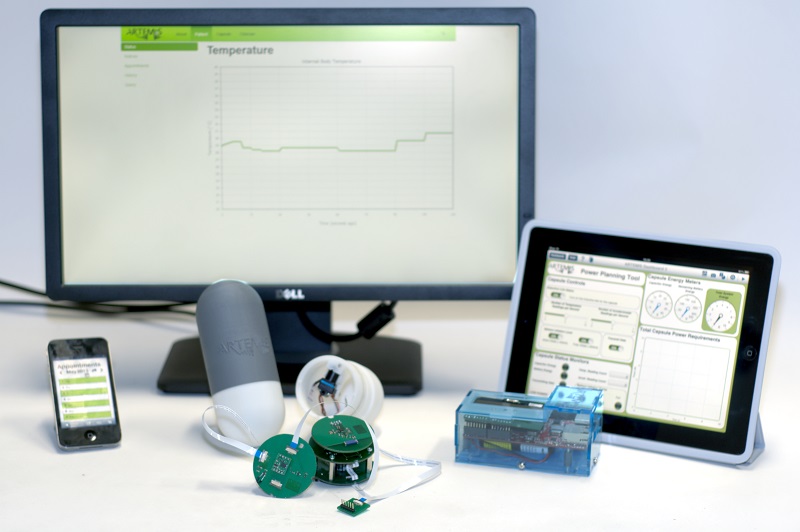
Figure 13: Full System Hardware Video 10: System Integration Video
Associated Benefits of using LabVIEW and NI Tools
Throughout the project, the use of LabVIEW and National Instruments hardware has enabled complex tasks to be dissected and simplified, into graphical user environments, allowing rapid prototyping and development of the integrated system. Using LabVIEW for the biological sensors, integrated with the National Instruments I2C interface, and a myDAQ, simple data samples were capptured from the 3-axis accelerometer and processed within LabVIEW. This meant that data processing could be performed on the computer, as opposed to designing integrated circuits and microcontroller circuits to perform the same data manipulation.
Additionally, in the exploration of modulation schemes and their associated power requirements, the National Instruments Universal Software Radio Peripherals enabled the characterisation of 11 different modulation schemes to be compared using LabVIEW VIs with the modulation toolkit add-on. Implementing this analysis in LabVIEW allowed clear and concise graphical outputs to be displayed in a simplified and clear interface, which made the selection and optimisation for the integrated system much easier.
Another instance where National Instruments software was vital to ensure the sucessful devliery of the project, was in the exploration of future use cases and applications of the capsule. Using the Data Dashboard Version 2.0 for Apple iPad, a simplified graphical environment provided an ideal platform upon which to explore the capsule capabilities and operations. Using the interactive clean graphics using the 'Eco' colour scheme (well aligned with the ARTEMIS identity) future applications and use cases could be explored, in terms of power requirements, data rates, and energy levels within the capabilities of the system. Using shared variables within LabVIEW, data processing could be performed on a desktop computer, whilst the graphical display and input data manipulation could be performed on an Apple iPad.
LabVIEW software and a National Instruments CompactRIO were essential to the capsule to control the pump system autonomously, allowing the balloon to be inflated and deflated after set pre-determined times. LabVIEW was also required to actuate the stomach test environment and allow for the modelling of a wave of contractions representing natural digestive motions through the control of five stepper motors.
Conclusion
The ARTEMIS project was completed over a period of nine months, integrating the work carried out by The University of Manchester and The University of Leeds. The system is fully functional, demonstrating complete end-to-end data flow from biomedical sensors, and the control of the gastric balloon over a secure web-application. Future use cases and applications have been explored through the use of a Power Planning Tool. National Instruments hardware and software could be used to develop this project further, in particular the communications link using the USRPs. The main area of interest for future development of this project is through the miniaturisation of hardware, and so the CompactRIO would allow exploration of FPGA implementation, which may enable a 1:1 capsule to become a reality.
[1] | H. Kehlet, “Multimodal approach to postoperative recovery,” 2009. [Online]. Available: http://www.improvement.nhs.uk/enhancedrecovery2/Portals/2/documents/multimodalapproachtopostoperativ.... [Accessed 15 April 2013]. |
[2] | The NHS Confederation, “The Operating Framework for the NHS in England 2010/11,” January 2010. [Online]. Available: http://www.nhsconfed.org/Publications/Documents/Briefing_192_Operating_Framework.pdf. |
[3] | R. Plowman, N. Graves, M. Griffin, J. Roberts, A. Swan, B. Cookson and L. Taylor, “The Rate and Cost of Hospital-Acquired Infections Occurring in Patients Admitted to Selected Specialties of a District General Hospital in England and the National Burden Imposed,” Science Direct, 2001. |
I'm absolutely blown away by the level of detail this project encompasses. Control plus test demonstrates the whole breadth of platform knowledge that can be attained to a very high level in a relatively short length of time. This is absolutely awesome and those who know me know I reserve the 'a' word for very special situations.
Epically well done and amazingly well presented. Congratulations.
Producing a 6:1 scale, fully integrated system across two Universities is an incredible achievement in the time frame. Excellent work to everyone involved in getting this project to such a high standard in such a small amount of time.
ok I want to know your stomach is what to do, good your circuit is very good. You come from where I come from China. My email: xieguimsn@hotmai.com look at it
ok I want to know your stomach is what to do, good your circuit is very good. You come from where I come from China. My email: xieguimsn@hotmai.com look at it
ok I want to know your stomach is what to do, good your circuit is very good. You come from where I come from China. My email: xieguimsn@hotmai.com look at it
