- Document History
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
Contact Information
University: PSG College of Technology
Team Members (with year of graduation): (1) R.Naveen (2) V.Suriya Kumar (3) N.Ram Vinojen (4) T.Akilan
Faculty Advisers:
Email Address: naveenraja16@gmail.com / 09677758038
Submission Language : English
Project Information
Title: Smart Surveillance Robot - A Novel Platform for Surveillance Employing Manual and Automatic Mode Control
Description:
“Money is not worth a single soul”.
Nowadays, we frequently get updated with the facts about fatal accidents due to poisonous environment, cave exploration, mining etc. This has surely been an area of concern over a long period of time, as the precious human life has been at stake under the expense of exploration purposes.
So, why risk ourselves when a modern innovation with virtual intelligence and capability to work automatically under human guidance can be made available? This surge has induced everyone to make a substitute, built on a simple platform and perform complex tasks.
The presently available robotic technologies like mobile robots and self guided vehicle such as patrol robot, path finder robots, industrial carry robots etc., are developed particularly to make human life comfortable. Moreover, the higher end application of this robotic technology is the mars rover and the mars path finder (sojourner).
But the presently available methodical robots have hardware and controllers loaded onto them. This will make troubleshooting hectic. Clearly, new methods have to be devised to relieve the burden on human and to make the robots light weight for better locomotion.
This project, deals with a new optimized method of building an independent mobile robot with manual and automatic control techniques with wireless mode of control and monitoring ,using LabVIEW as the developing platform.
OBJECTIVE:
- To build a cost effective and efficient robotic system, programmed to provide a platform for surveillance purpose, thus acting as a substitute for human in hazardous activities like mining, exploration, patrolling sensitive areas and for various applications that are at a safer distance .
- To impart intelligent control techniques for the robotic platform, so that it’s dynamic performance, in varied applications of path and dimensions tracking, can be further developed.
- To monitor the movement of the robot through wireless mode of communication.
- To establish complete transparency of data over the internet.
THE SETUP:
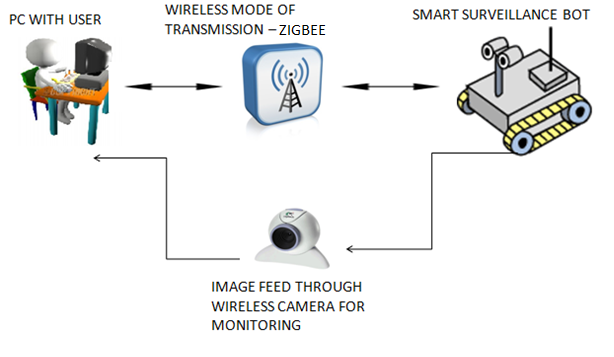
The four wheeled robot mechanism , employs differential motor speed control. The concept of obstacle avoidance and autonomous movement is achived by designing with three IR proximity sensors to detect obstacles and move accordingly based on the “left hand on wall” technique. Wireless transmission technique would be incorporated for data transfer and control from the main station. The monitoring duties would be taken care by the camera mounted in the front and this would be assisted by a head light to provide proper lightning effects.
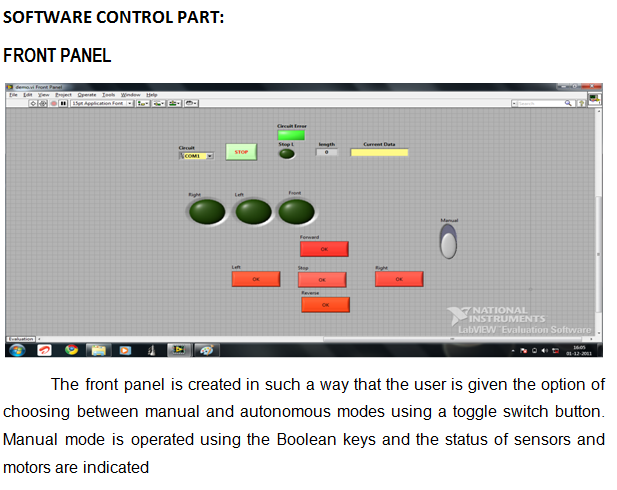
The user would be provided with the option of choosing either from the manual or automatic control modes, in case where automatic mode can cause ambiguities. Control techniques are programmed based on the signals detected from the IR sensors, which is then interfaced to the PC via NI – DAQ.
Products
HARDWARE REQUIREMENTS:
- LabView- GUI platform for programming and control from PC.
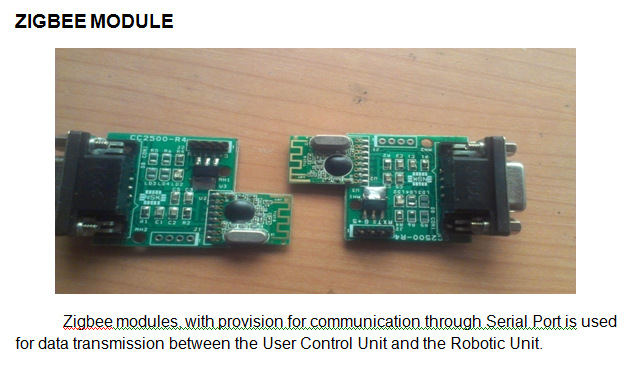
- Zigbee for transmission of data from hardware to software.
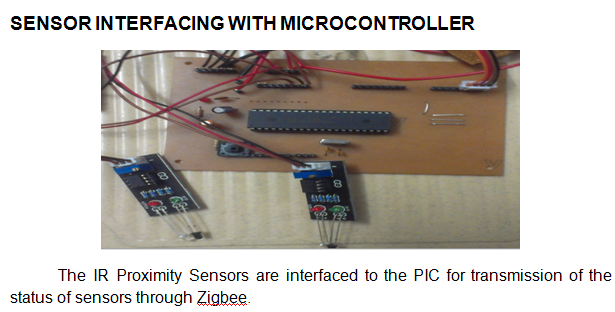
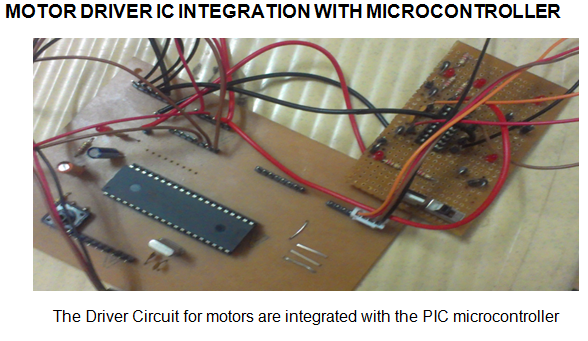
- Microcontroller for data manipulation and control.
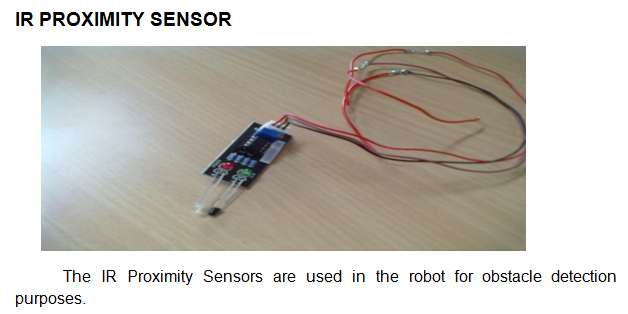
- Proximity sensors for obstacle detection.
- Rechargeable batteries for assistance in robot life.
- DC motor that enables in movement of robot.
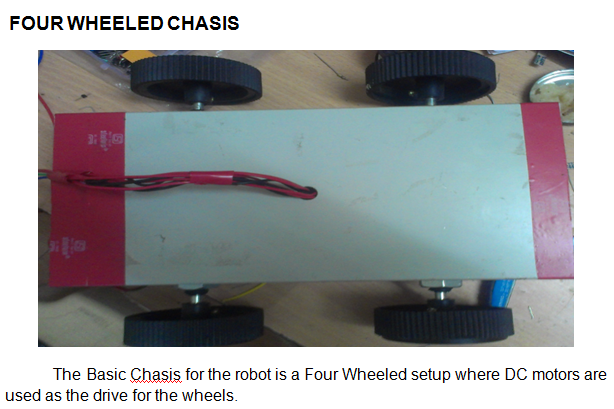
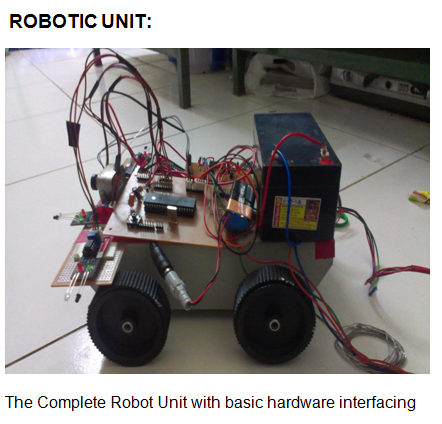
- Four wheeled robot chasis.
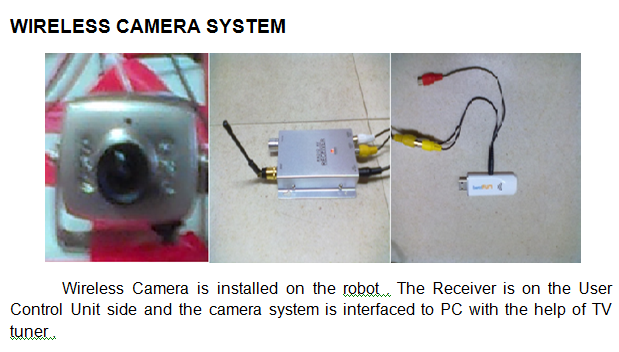
- Wireless camera for monitoring.
SOFTWARE PLATFORM:
- LabVIEW 2011 .
- Measurement and automation explorer.
- MP Lab
WORK DONE AT PRESENT:
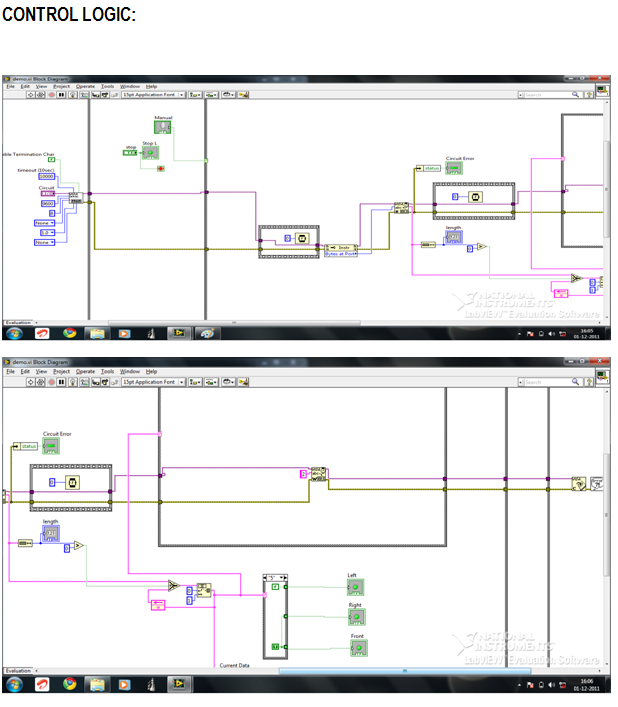
The user is given the option to switch to autonomous mode. The robot moves along the path with the assistance from the proximity sensors. The proximity sensors are calibrated using LabVIEW. The programming logic based on the status of sensors is coded using flat sequence structure.When all the three sensors are in ON state i.e. When the three sides around the robot gets blocked , the robot takes a reverse motion and turns left or right based on the wall proximity . To implement this action a separate logic is programmed in autonomous mode control as a separate case structure.
ADVANTAGES:
- Assured safety.
- Flexible, monitored control.
- Easily reconfigured to other robotic applications where humans can be in danger like nuclear plants, oil refining, buildings damaged due to natural calamities etc.
APPLICATIONS:
- Path finder applications areas inaccessible by humans like mines and damaged buildings.
- Dimensional tracking of the area under surveillance and patrolling.
- Self guided vehicle for industrial material transportation system in large workspace such as hospitals, container ports etc.
FUTURE SCOPE:
In this world of technological advancement and the need to protect precious human lives, the concept of surveillance under supervision will always be ‘THE NEED OF THE HOUR’. This robotic platform for surveillance purpose can be extended to many applications where human life would be at stake.
The concept of surveillance can be extended to ‘Land Mine’ detection, just by incorporating a metal detector and high resolution camera along with the robot chasis developed.
In case of fire accident or smoke detection, the robot can be fitted with the respective sensor units, so that the information regarding the hazardous situation can be made available for the people.
The efficiency of the robotic movement can further be enhanced by using efficient intelligent control algorithms and servo motors.
Thus the automation system being developed has the inherent advantages of flexibility, safety monitored control and easily reconfigurable to other robotic applications where human finds toxic environment such as oil refinery, nuclear reactor control, coalmining fields , dimension and path tracing etc,.
Hence, the scope of this robotic system is always on the brighter side.
Others
Video Link: https://www.youtube.com/watch?v=Ru4DbmlZ8Fc
