- Document History
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
LabVIEW Student Design Competition
SUU Automated Guitar Hero Robot II
Contact Information
University: Southern Utah University
Team Member(s): Ammon Losee, Shane Christensen, Trenten Dopp
Faculty Advisors: Dave Ward
Email Address:
Project Information
Title: SUU Automated Guitar Hero Robot II
Description: Acquiring video from an Axis 206 30-FPSnetworking camera, we process the video on a desktop computer. After processing the video it is output to the USB-6009 device triggering the DC Solid State Relays which engages 24V to Electric Rotary Solenoids pushing the PlayStation 3 guitar buttons.
LabVIEW Products:
National Instruments USB-6009 (DAQ Assistant)
LabVIEW 2010 (Full Version registered to Dave Ward)
Other Products:
6 Electric Rotary Solenoids, 3 Electric Linear Solenoids
Axis 206 Ethernet Video Camera to capture video images (30 FPS)
Sony Play Station 3 and Guitar Hero Software and Guitar.
24V 5Amp Switching Power Supply; Desktop Computer; Dual Monitors; Dual Flat Screen Televisions.
The Challenge:
We interface a network camera with LabVIEW and a desktop computer to play electric rotary solenoids in sync with the PS3 Guitar Hero World game, thus enabling it to strum and press each individual button. The robot is also able to compete against other players at an Expert Level on Head-To-Head, Computer VS Human.
These are our design requirements we followed for the second guitar.
- Find a better processing unit.
- Develop a lighter, quieter, and more compact system that is easier to move.
- Develop a program that determines decisions off of Color Video (no filtering).
- Develop a sturdier Camera Mount.
- Construct a manual control box.
- Capable of playing consistantly above 85% and pass songs on Expert in “Career” mode.
- Capable of playing consistently above 85% on Expert in "Head to Head" mode on either side.
The Solution:
Automated Guitar Hero is a senior design team composed of three engineering students from Southern Utah University. We developed this robot to interect and challenge others on Gutar Hero World Tour. It has been broken down into two parts the hardware and software.
The Hardware: Acquire Video; Process each individual image from video using a computer; Output to theUSB-6009; Activate Solid State Relays; Activate Solenoid; Press guitar buttons.
The Software: Open Camera; Read Camera Attributes; Configure Grab; Grab Images; Get 3 Color Pixel Values& Locations / Guitar Notes & Strum; Convert Color to RGB Values; Add 3 Color Values to determine whether to strum and press a button; Output Boolean Values to Activate Solenoids on Guitar.
Why Labview?
LabVIEW creates a great interface which we can modify and adjust to any application that is desired. Gaming industries are using automated systems to create easier interaction between the system and humans. This project is a demonstration of how a computer uses LabVIEW to make decisions using actual video at 30 frames per second, whereas a human eye / brain combination can see well over 100 frames per second.
Screen Shots
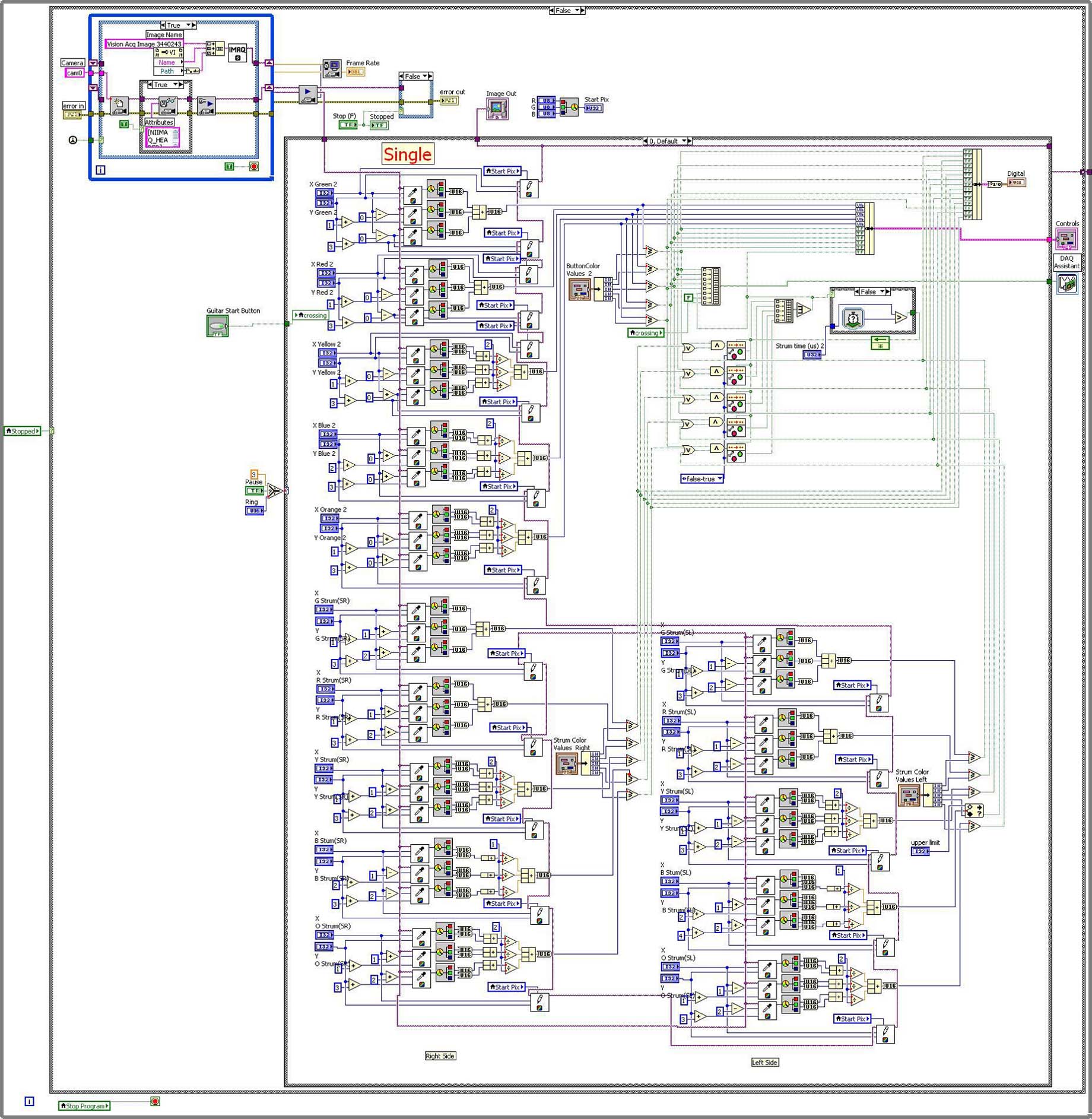
Block_Diagram.JPG
This is our Block Diagram showing how we acquire video, and check the pixel locations and values of the color in red, green, and blue (RGB). It then does a comparison of 3 values of three different pixels added together against a constant. If the value is larger than our constant it notices the value to be a note to be played and outputs a Boolean value to press the guitar button. The strum also uses the value check but with a difference that it is only triggered when the Boolean value changes from false to true using a Boolean crossing.
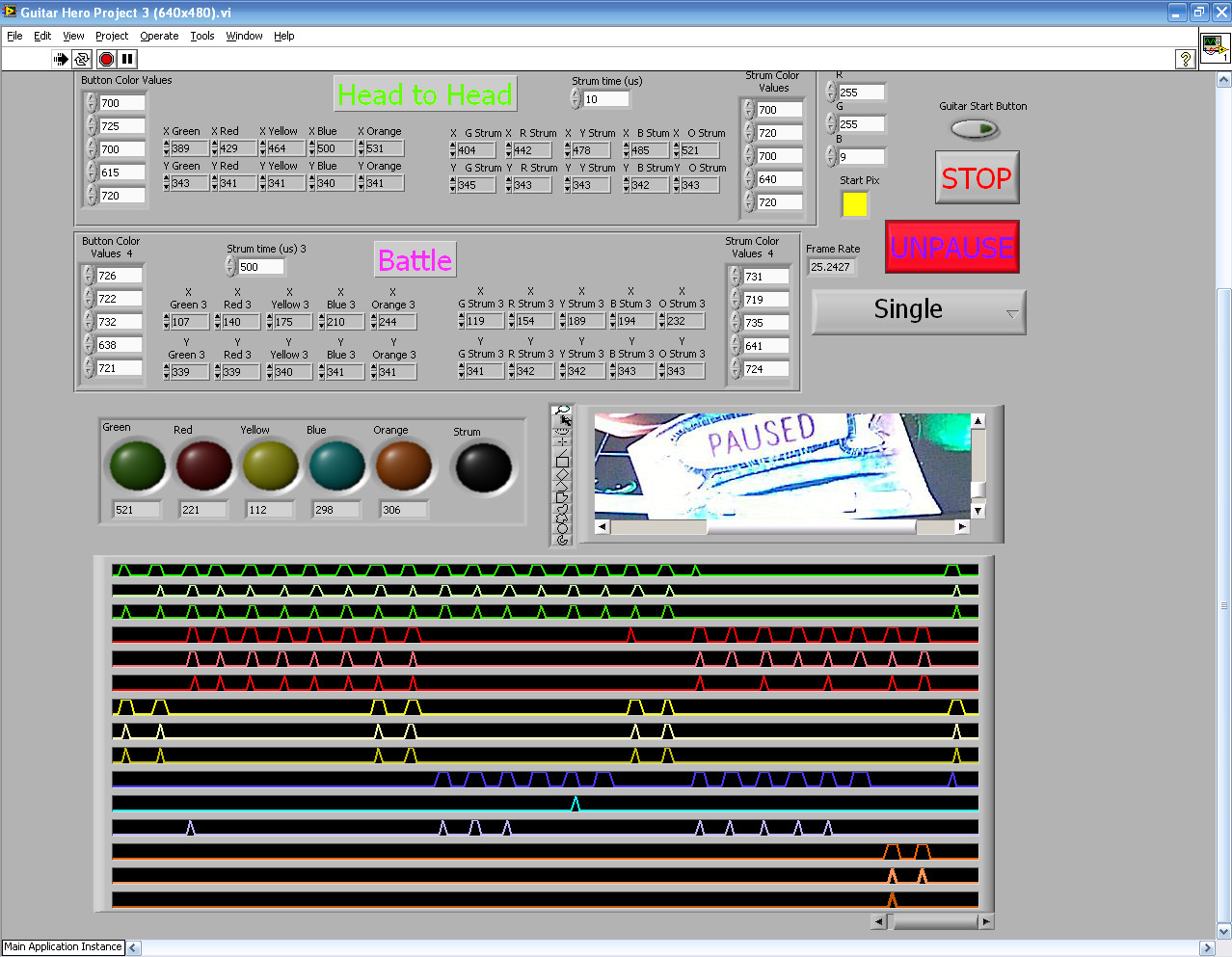
Front_Panel.JPG
This is the Front Panel. It shows all the constants that we are comparing our values against which we can tweak at any time when we see the program has missed notes or strummed too many times. If such things happen the constant is raised or lowered to either be more sensitive or less sensitive. After everything is done in the comparison we output to theUSB-6009 and also to a graph and image feed to watch for additional errors the program might have.
PICTURES
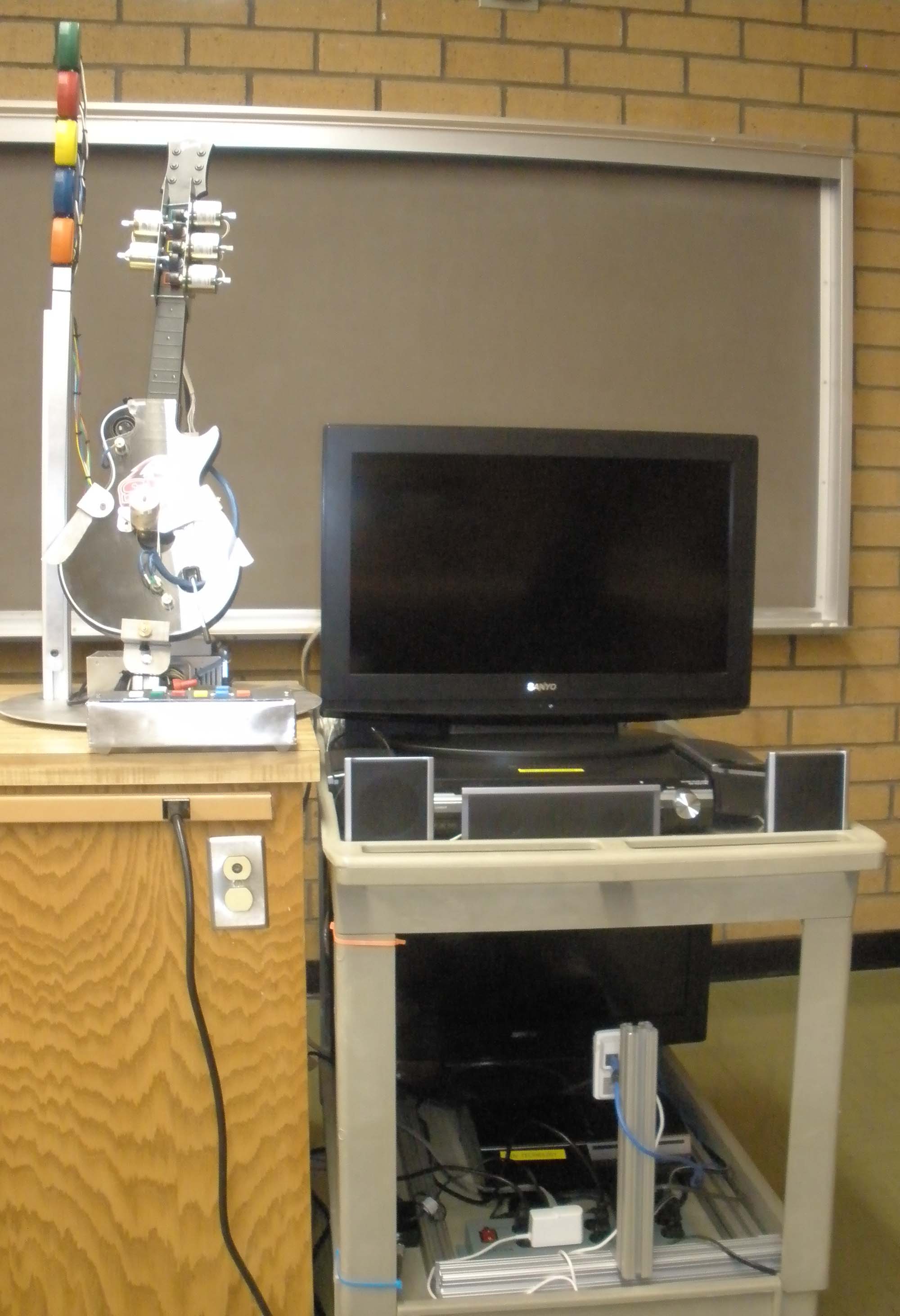
SUU Automated Guitar Hero Robot II Setup.JPG
The Whole picture of Guitar Hero Robot II a vison controlled robotic system used to play on "Single", "Head-To-Head", and "Battle" modes.


Guitar II.JPG Guitar Control Box.JPG
This is the Guitar with attached solenoids; electrical rotary solenoids for the five guitar buttons: green, red, yellow, blue and orange. Also, one rotary solenoid is set to push the strum button. There are three electrical linear solenoids set to push the “ON” button, “START” button, and “SELECT” button. At the bottom of the guitar we have a control box to manually push all buttons on the guitar for menu selections. Above and off to the left side of the guitar we have five lights to make sure that people can see what the guitar is actually doing.
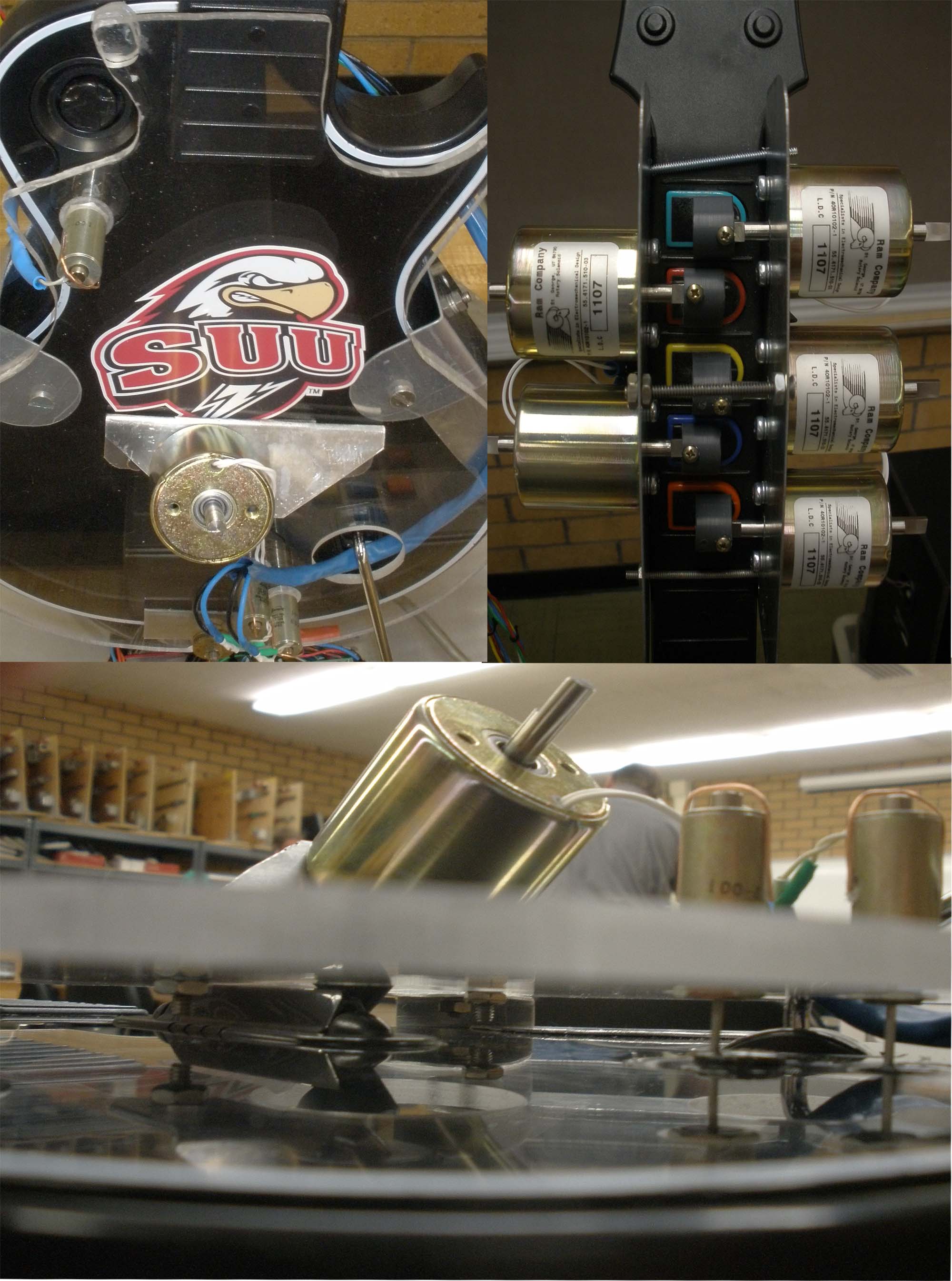
Guitar Solenoids.JPG
These are controlled by the USB-6009 unit and are used to control the Guitar Buttons.

Competition.JPG
This is the complete setup of the Guitar and a secondary television so others can challenge our guitar on “Head-To-Head” mode.

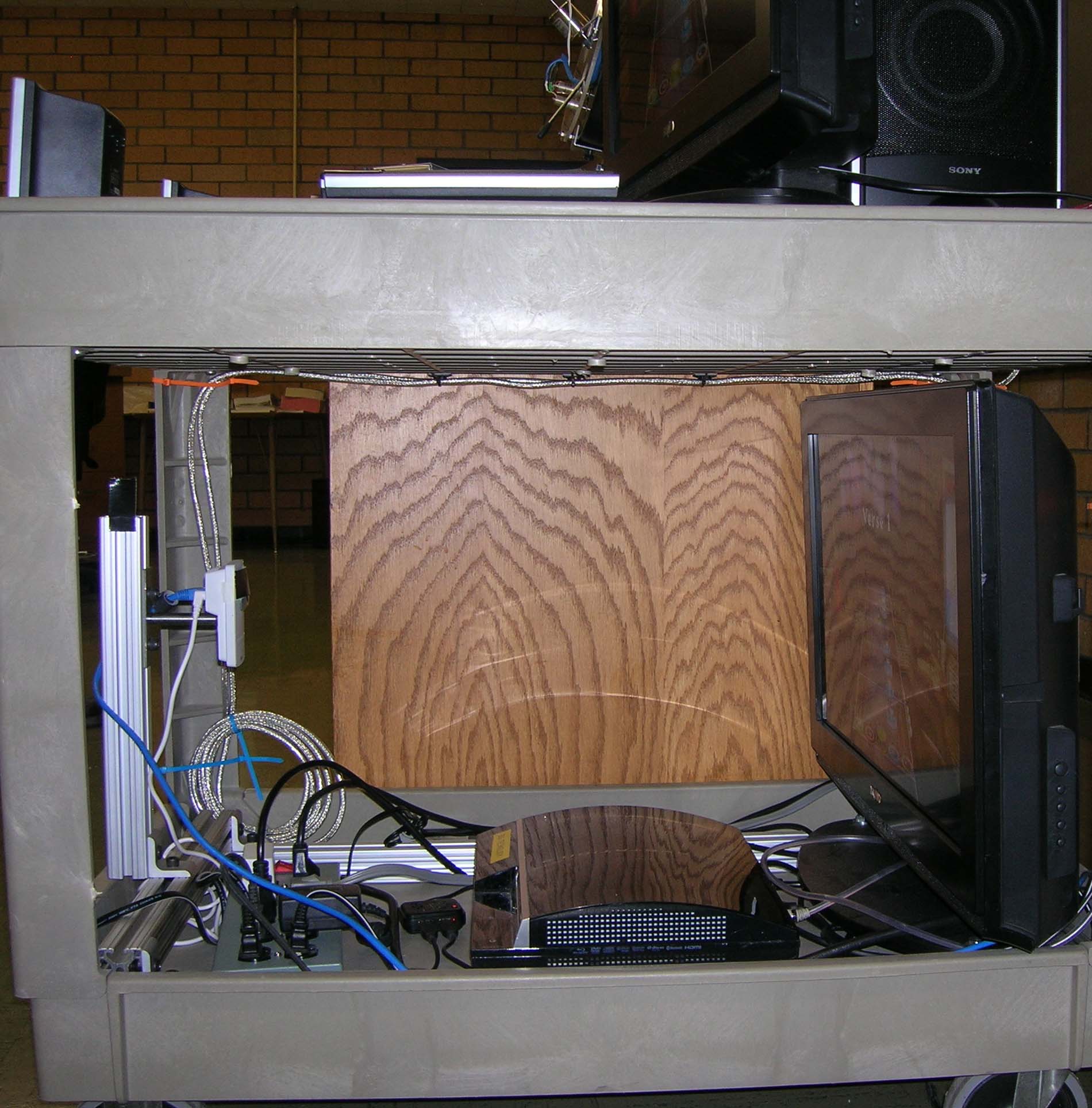
Side View of Camerasetup.JPG
This picture shows the camera mount setup, which is designed to keep the camera secured. It is encased in this cart for easy transportation for demonstrations. The television on top is for competition and watching the guitar play in “SINGLE” mode. The television on bottom is for the camera acquisition.


Camera.JPG
This picture shows what the camera is sending to the desktop computer and how it is mounted.
Video Available at: http://www.youtube.com/watch?v=EyLfGibQ6Vk
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
I agree,
Hello there,
Thank you so much for your project submission into the NI LabVIEW Student Design Competition. It's great to see your enthusiasm for NI LabVIEW! Make sure you share your project URL(https://decibel.ni.com/content/docs/DOC-16567) with your peers and faculty so you can collect votes for your project and win. Collecting the most "likes" gives you the opportunity to win cash prizes for your project submission. If you or your friends have any questions about how to go about "voting" for your project, tell them to read this brief document (https://decibel.ni.com/content/docs/DOC-16409). You have until July 15, 2011 to collect votes!
I'm curious to know, what's your favorite part about using LabVIEW and how did you hear about the competition? Great work!!
Good Luck, Liz in Austin, TX.
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
The Coolest thing since air conditioning.
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Awesome Job Little Bro and Team! It is a super sweet robot.
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Sweet! The electric solenoids stomp those noisey air pistons.
I posted a link to here from the SUU EET blog http://suueet.blogspot.com/2011/06/check-out-latest-on-suu-automated.html
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
When are the entries judged?
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Sweet Stuff!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
