- Document History
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
Paintball Picasso
Title:
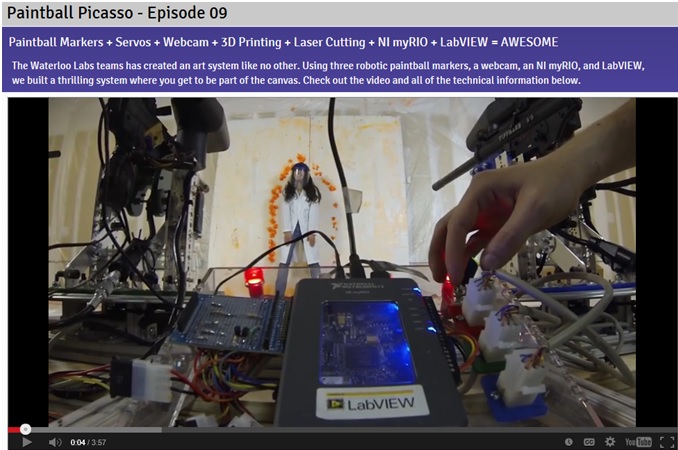
Paintball Picasso
Overview of what project is:
The Paintball Picasso system consists of three robotic paintball markers that can create art. Each paintball marker uses servos to create a pan-tilt platform to move the markers. Custom electronic triggers in the markers allow them to be fired remotely, shooting more than 10 paintballs per second. The system is controlled by the NI myRIO embedded controller and LabVIEW software that enables the system to be controlled in a variety of ways, including taking an image from a USB webcam in order to outline the person.
Picture of project:


Video of project:
Parts List:
-3 Tippmann A5 Paintball Markers
-Rosman Laser Sight (allowed us to calibrate the markers without shooting paint)
-3D Printer (we used a MakerBot Replicator 2)
-Laser Cutter
-Extruded 80/20 Aluminum
-TETRIX Building System
-High-Torque Servo Motor
-Lazy Susan
-Autodesk Inventor
-Computer Aided Drafting (CAD) components
-NI myRIO Embedded Controller
-Electronic Trigger
-3 High Capacity Power Supplies
-Windows Laptop
-LabVIEW 2013
-LabVIEW Real-Time Module
-LabVIEW FPGA Module
-Vision Development Module
-USB Webcam
-NI myRIO Real-Time Controller
-NI Vision Assistant Express VI
Wiring Diagram:
Real Time
The NI myRIO also contains a real-time program that reads in the image directly from a webcam and organizes the list of paintballs into a nice smooth path to minimize the movements between shots.
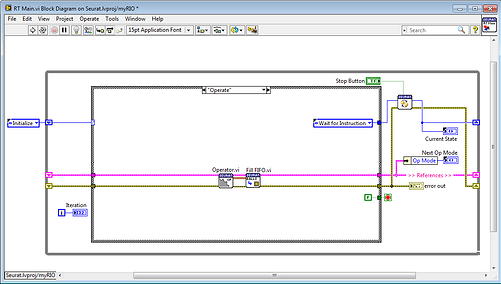
Windows
The NI myRIO connects via USB to a Windows laptop running the LabVIEW control program and graphical interface. In this program we could control the modes, manually move the markers, and processes the images coming from the NI myRIO.

Instructions:
Full instructions and a downloadable myRIO code can be found here.
