- Document History
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
Contact Information
University: D J Sanghvi College of Engineering, University of Mumbai, India
Team Member(s): 2
Faculty Advisors: 1
Email Address: rdd0101@gmail.com, pbs0001@gmail.com
Country: India
Project Information
Title: Controlling SCARA using Virtual Open Sourced Teach Pendant and provide a unique HMI, India
Rushabh Doshi - rdd0101@gmail.com and Palak Sanghavi - pbs0001@gmail.com
B.E Electronics, D J Sanghvi Colelge of Engineering, Mumbai University, India

![]()
Description:
Develop a unique Virtual Teach Pendant using LabVIEW for eliminating the need of a hard wired Teach Pendant genreally present in an Industrial Manipulator System. This Teach Pendant vi has 3 modes and is open sourced and can be programmed according to the need of the application for the system, so by just changing the software on the teach pendant we can make the Robotic system perform versatile operations like pick-place, painting, welding, cutting, etc
Products:
NI LabVIEW 2009, Ardunio LIFA toolkit, VIPM, Control & Simulation toolkit
The Challenge:
1. Introduction
General Industrial Robotic systems consist of a Robotic Manipulator, a Controller board and a Teach Pendant used for teaching the Robot the desired task. This Teach pendant can be pretty complicated and not so easy to program by an un-skilled employee in a factory, the project was developed on this basis. The primary motive of the project was to develop a simple yet effective Teach Pendant for Robotic systems which would be open-sourced and re-programmable.


Fig. 1 The TePHa-Graph SCARA system developed by the team
2.Project Development
Any Robotic system consists of the Software and Hardware.

Fig. 2 The KUKA Robotic System
2.1 Software Development –
The driving brains behind any robotic system are the software which drives the real world actuators which eventually drive the manipulator to perform a certain task. Hence, the first task was to develop a software which would be efficient as well help achieve a good Human Machine Interface for the user. National Instrument’s LabVIEW software was the platform for building such a virtual teach pendant.
The software platform used was LabVIEW (Laboratory Virtual Instrumentation Engineering Workbench). As the name suggests, it is extremely useful was developing Virtual Instruments, hence optimum for the application of this project. LabVIEW is graphical software which helps develop an application faster. LabVIEW has 2 parts: Front panel for the user (HMI) and block diagram for the programmer to develop the application.
So using LabVIEW the Virtual Teach Pendant was developed on a computer which could run on any PC, hence eliminating the need for a hard wired Teach Pendant, thus saving the extra cost of a hard wired teach pendant.
This Virtual Teach Pendant is universal and can be applied to any robotic system with little or no modifications in the block diagram. Hence, this Teach Pendant is valid not only for the SCARA system but for any robotic system.
The developed Virtual teach pendant has 3 modes:
- Standard Teach Play Mode
- Haptics or Lead by Nose Mode
- Graphic Mode
Hence the SCARA robot is named TePHa-Graph.
2.1.1 The 1st mode is the Standard mode is a replication of how normal teach pendants work, the front panel of this mode consists of a 3D animation of the SCARA system in real time during teach mode for the user to see the Robot in motion on the computer screen, this feature is useful for making the system mobile, for example by adding a ethernet shield on the conroller, and adding internet toolkit in the vi , we can make the teach pendant controllable from the office whereas the robot is present in the factory, hence rather than tradional teach pendant which is static on a robotic system , this virtual teach pendant is mobile. Also the other features include, the Workspace Trajectory Graph to observe the xy path of the robotic arm, Servo Motor Switches and a switch for choosing the Teach / Play mode and the speed control option.
In the standard mode, Teach mode is used to teach the robot the desired trajectory by moving the Servo Knobs/Switches by forward kinematics.
This is then repeated again and again by the Robot in play mode for task repetition, the same task is reapeated till the user stops the operation.
It was observed that it takes quite a lot of time to figure out the operation by this mode of operation. It is not easy to visualise the servo angles and calculate mentally the corresponding end effector position. Hence for an unskilled employee it becomes very difficult to program such a Robotic system for his application in his workspace for automation.
Although this is a good methods for Pick and Place operations but the uder needs to be well acquianted with basics of robotics to operate such a system.
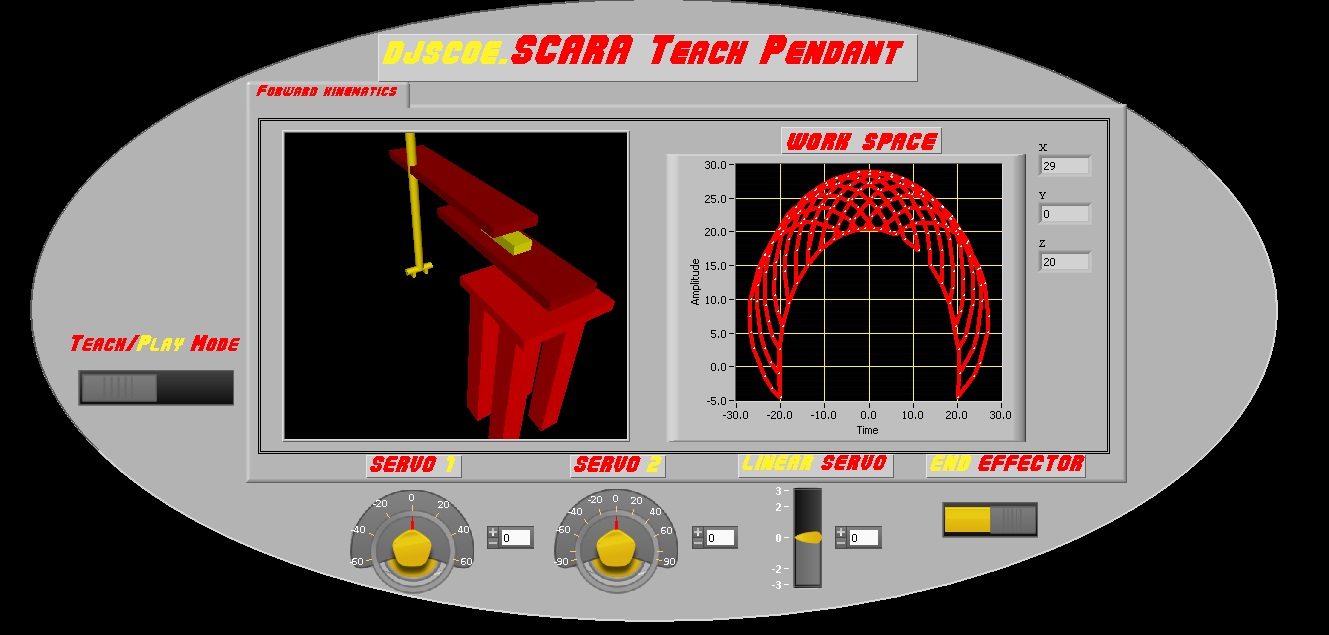
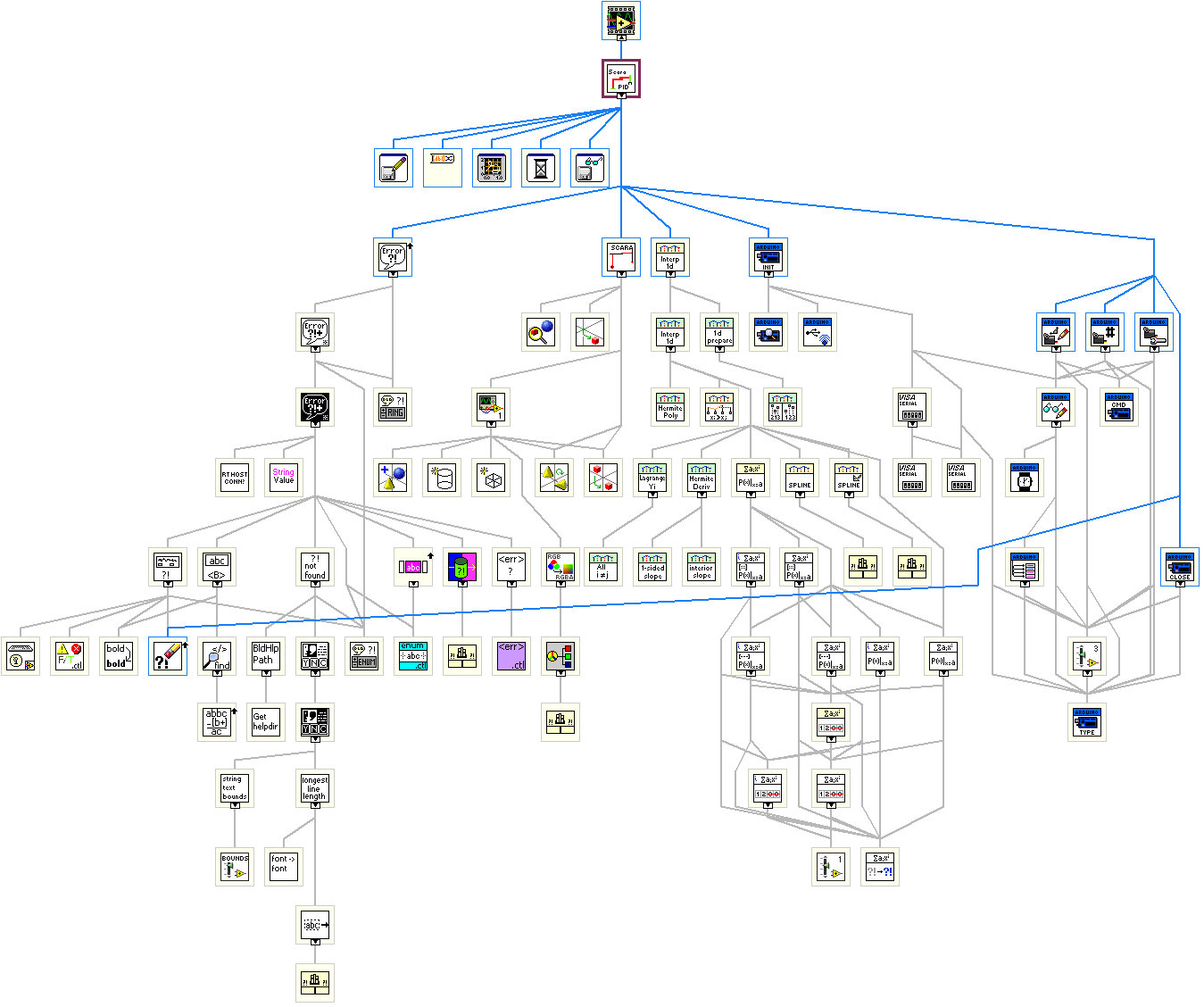
Fig. 3 Standard Mode (Teach Play Mode) with 3D picture Control and Workspace XY Graph & Programmer VI hierarchy
2.1.2 The 2nd mode of Haptics or Lead by nose was developed to easen the task of programming the Robot. In this mode, the front panel again consists of a 3D animation of the SCARA system in real time during teach mode, the Workspace Trajecory Graph, Servo Motor Indicators and Speed Control option. So although the front panel almost looks the same, the operation is entirely different. In this mode, the user the asked to hold the actual end effector of the robot and the guide it to the desired position, in the back drop i.e in the block diagram, the servo's potentiometric feedback is used to store these angles in a database file and are played back during the play mode by using the read from measurement file function. The front panel's Servo controls are replaced by Servo indicators to ensure the robot movement.
It is like teaching a child how to walk by holding his hand, we teach the robotic system the task to be performed by holding its link (hand) or end-effector (finger) and the robotic arm's software memorises these servo values and plays them back during the play mode to achieve a perfect result.
It was observed that it takes almost no time to teach the robotic system the desired task. Multiple users where asked to teach the robotic arm by this method and even the uders who had seen this system for the 1st time could teach the robot in no time the desired task.
It was very easy for an unskilled employee to develop any application desired in no time using this mode.
This is a very efficient way of teaching a robotic system especially for applications such as pick & place,painting, cutting and drilling.
All these applications can be performed by just replacing the gripper by the required tool for the application.
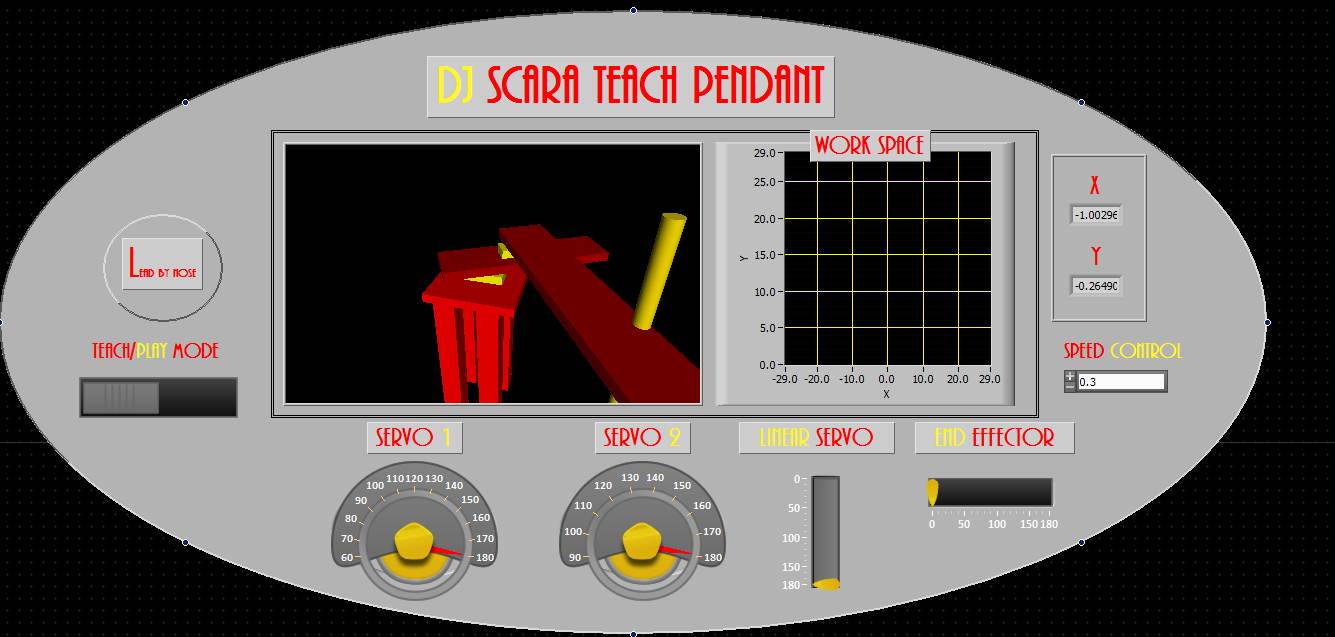
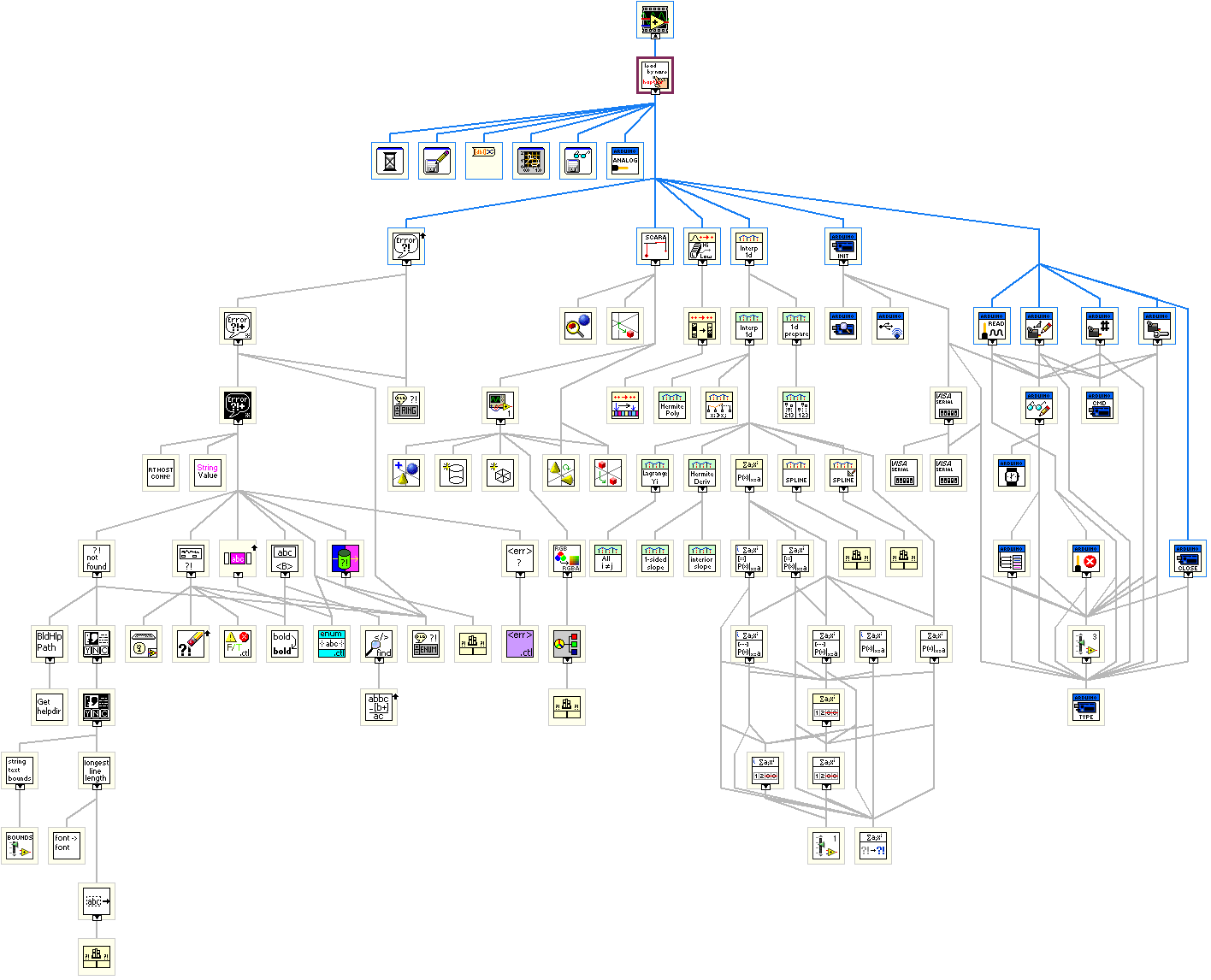
Fig. 4 Haptic Mode (Lead By Nose Mode) where Controls are replaced by Indicators & Programmers VI Hierarchy
2.1.3 The 3rd mode of operation of Graphic mode is a replication of CNC routing machines. In this mode the Front panel consists of a 3D animation, Trajectory Graph but there are no switches or Indicators for the Servo Control, rather there is a Panel where the user drags his mouse to form a desired shape and the Robot traces this path inreal time.
In the back drop, inverse kinematics is what calculated the angles of the servo from the xy coordinates provided by the Panel. Trajectory planning algorithm was developed to attain a perfect path during inverse kinematics.
This mode helped ease the task of shape making and writing.
In applications where precise shapes where needed this mode helped achieve the task in no time.
This mode helps the SCARA to behave like a CNC machine and helps to develop applications based on CNC without a g-code or any other complicated programming thus making it suitable for an unskilled employee to develop an application using this kind of a teach pendant mode.
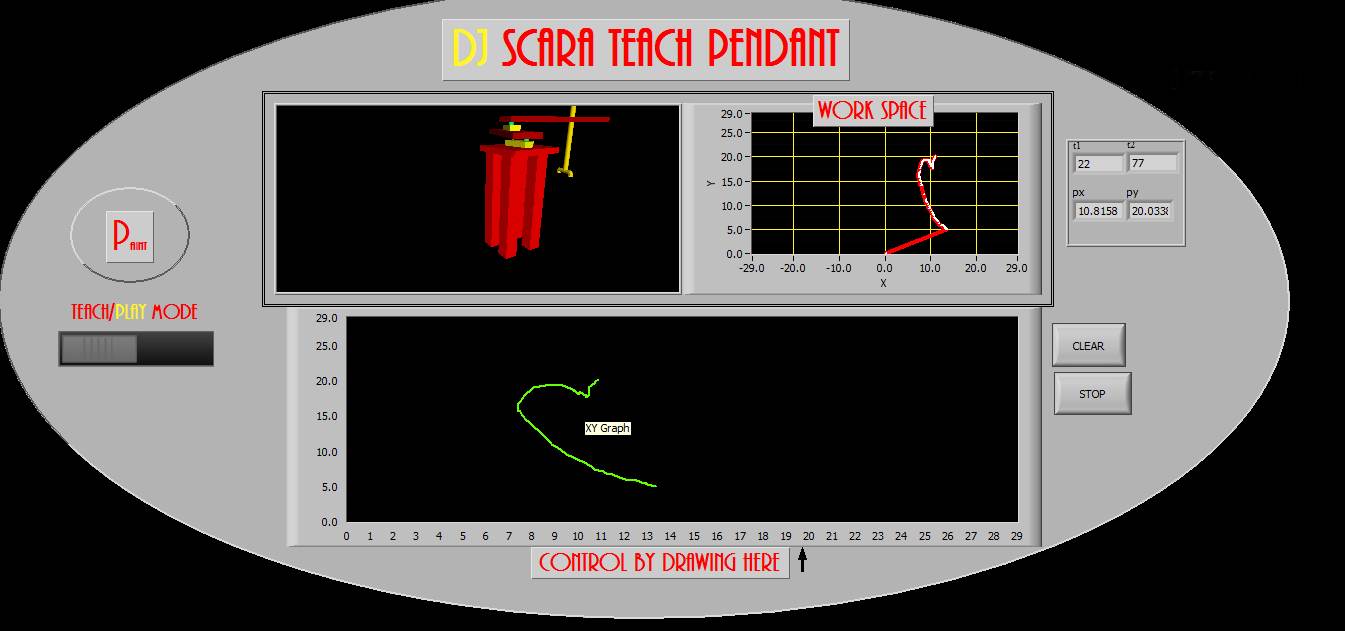
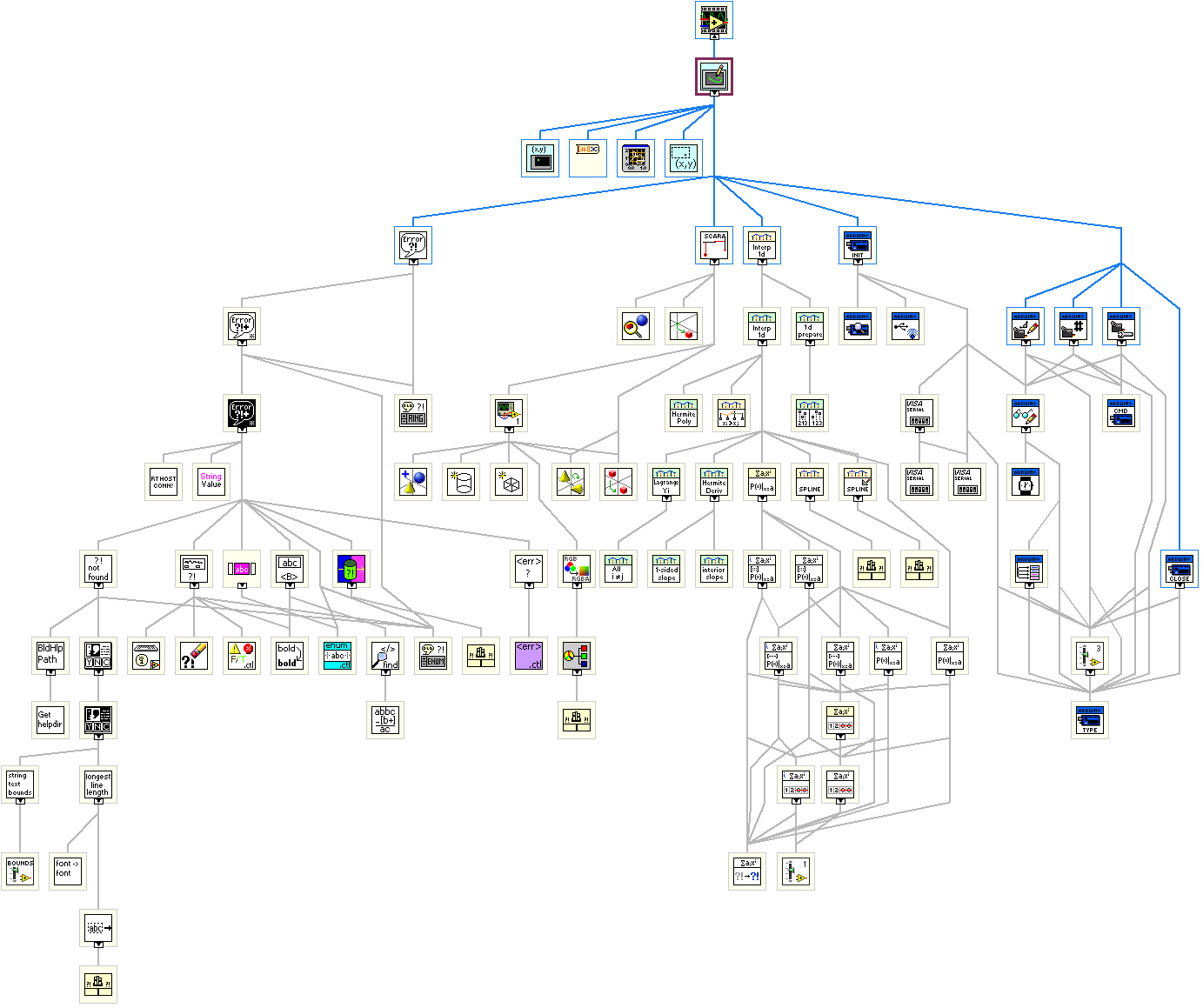
Fig. 5 The Graphic Mode with the paint panel where the uder can draw the shape desired & Programmers VI Hierarchy
2.2 Hardware Development of SCARA-
2.2.1 SCARA
SCARA stands for Selective Compliance Robotic Arm and is widely used in Pick and Place operations in Industry. The SCARA system was chosen as the hardware medium to develop and test the virtual teach pendant. The SCARA is named TePHa-Graph SCARA to reflect the 3 modes of operation of the Robot.

Fig. 6 The Developed TePHa-Graph SCARA system for demonstartion of Virtual Teach Pendant
2.2.2 Controller Board
After the software development in virtual world, there had to be some interface with the real world. The Arduino is the Controller Hardware interface used in the project. Being cheap it fits the purpose of a student project. This can be replaced by a NI-CRio real time controller in an Industry, but the system will remain constant.
But this should be ideally replaced by a Real Time NI cRIO controller for developing a RTOS Embedded Robotic System which will be rigid as well as accurate. Such a system can easily be incorporated in the system developed using pre defined interacing algorithms for the NI cRIO controller. Again, the main concept was to develop a Virtual Teach Pendant on LabVIEW, the controller can be anything depending on the developer's budget and application.
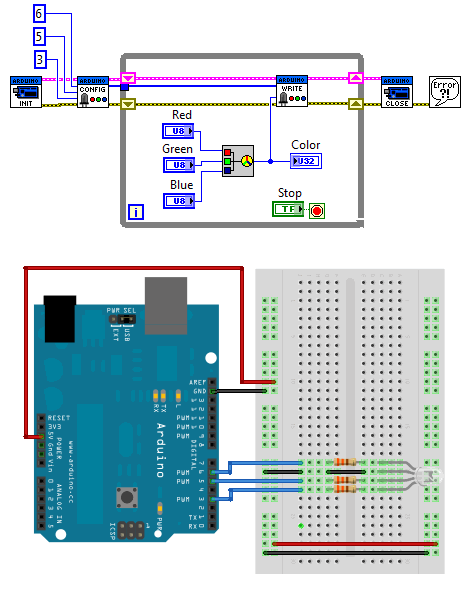

Fig. 7 The Arduino Controller should be replaced by Real Time NI cRIO Controller
2.2.3 Motors
The actuators used are hobby servos, which work on the principle of PWM. The specs of the motor used are 15kg-cm torque and 0.15 per 60 degree speed. Being light weight and extremely efficient due to internal circuitry working on PID logic they fit the purpose of robotic application. These actuators are cheap and easily available for student projects.
The system ideally with proper funding should be developed using Industrial Servos for better precision and accuracy. The Designed system will well work with Industrial Servos as shown below from NI with proper Controller Interface. The main concept is of a Virual Teach Pendant which is developed on LabVIEW which will then control the Industrial Servos which can be easily incorporated in the program by defining them as the hardware and not hobby servos.
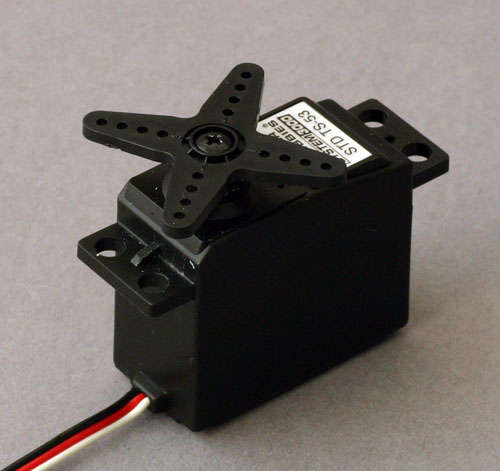
 Fig. 8 The Hobby Servo and its working using PWM technique should be ideally replaced by Industrial Servos by NI
Fig. 8 The Hobby Servo and its working using PWM technique should be ideally replaced by Industrial Servos by NI
2.2.4 Structure Development
The main challenge that was faced in developing and designing the mechanical structure was keeping the stability of the structure. The design was developed on AutoCAD software.
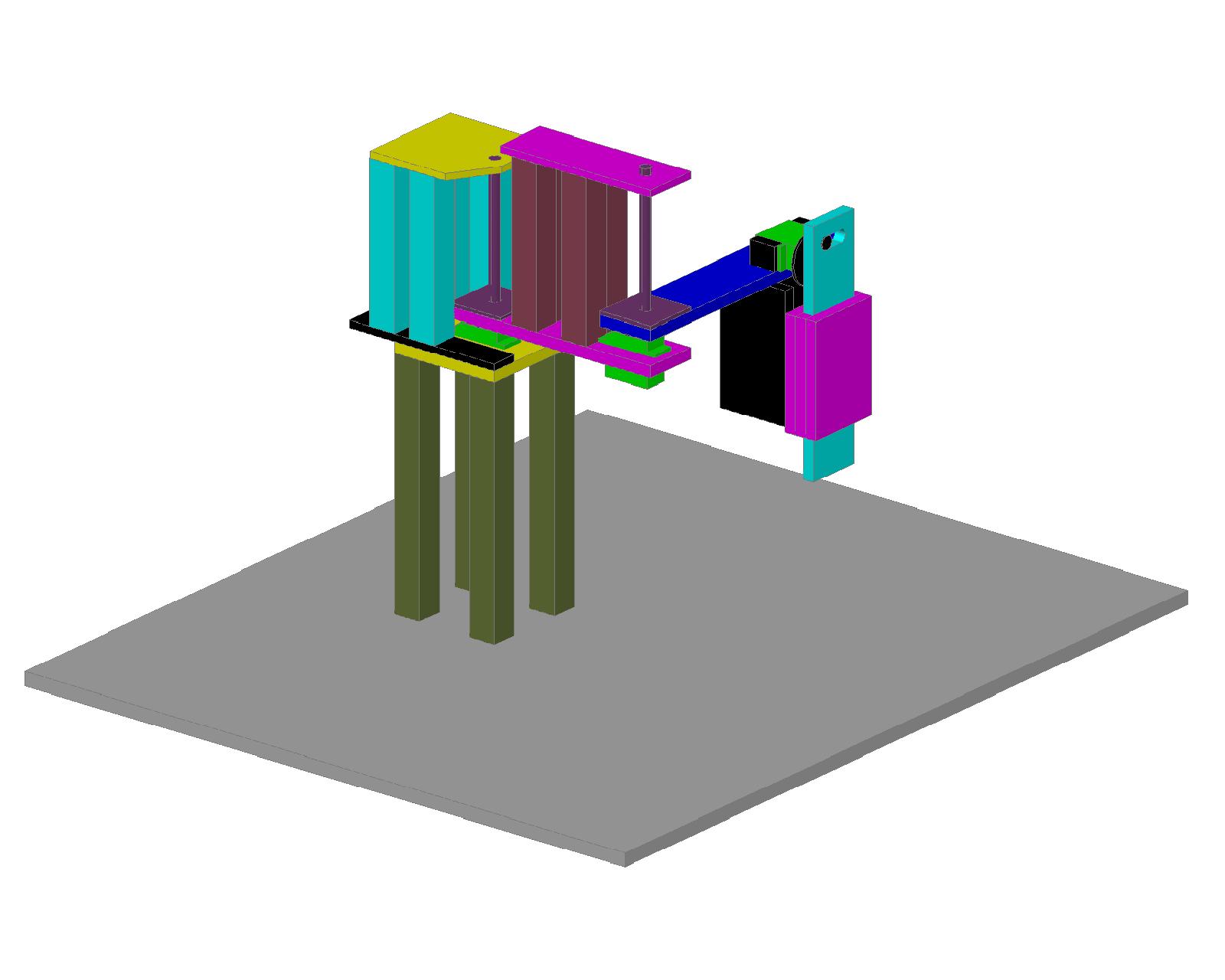
Fig. 9 Structure Frame Design on Autocad
The volume of the structure was found and using the formula density= mass/volume , the materials that were suitable were Bakelite(density 1.23) and acrylic(density 0.99) since we did not want the mass to be very large to enhance the stability. Bakelite was chosen for the frame development due to its property to act as an insulator and strength. The entire frame was developed in an Industry by providing the manufacturer part list with autocad drawings.
To sustain the SCARA Robot vibrations, Base frame was made of nylon rods. Once ready the SCARA structure needed weight compensation for stability. To achieve this, Guide system was developed on the servos using Aluminium Guide design.
Another challenging issue was to convert rotational motion of a hobby servo to linear motion of the SCARA. The mechanism that was finally implemented was the CAM mechanism.
The Gripper developed was a 2 fingered gripper and that too works on hobby servos.

Fig. 10 Project Manufacturing Time-Line
3. Conclusion
This Robotic system can be adapted to suit any application using the 3 modes in software i.e the Teach Pendant without any change in Hardware. hence, what we intend to demonstrate is a better open sourced virtual teah pendant system on LabVIEW which could be used to run any robotic system , thus elimintaing the cost of an actual Teach Pendant. Also, methods like Haptic Control can be easily achieved and implemented , especially in SCARA systems for unskilled employees to operate the system faster.
Thus, this method of developing the teach pendant can revolutionize the Industrial Robotics field and help reduce the cost of such Robotics systems and can be more suited to Indian Market since in India there is a huge demand for automation but it should be at a low cost and also unskilled human user friendly.
We believe such a robotic system could help Robotic Developers attain a huge market in Developing countries like India.
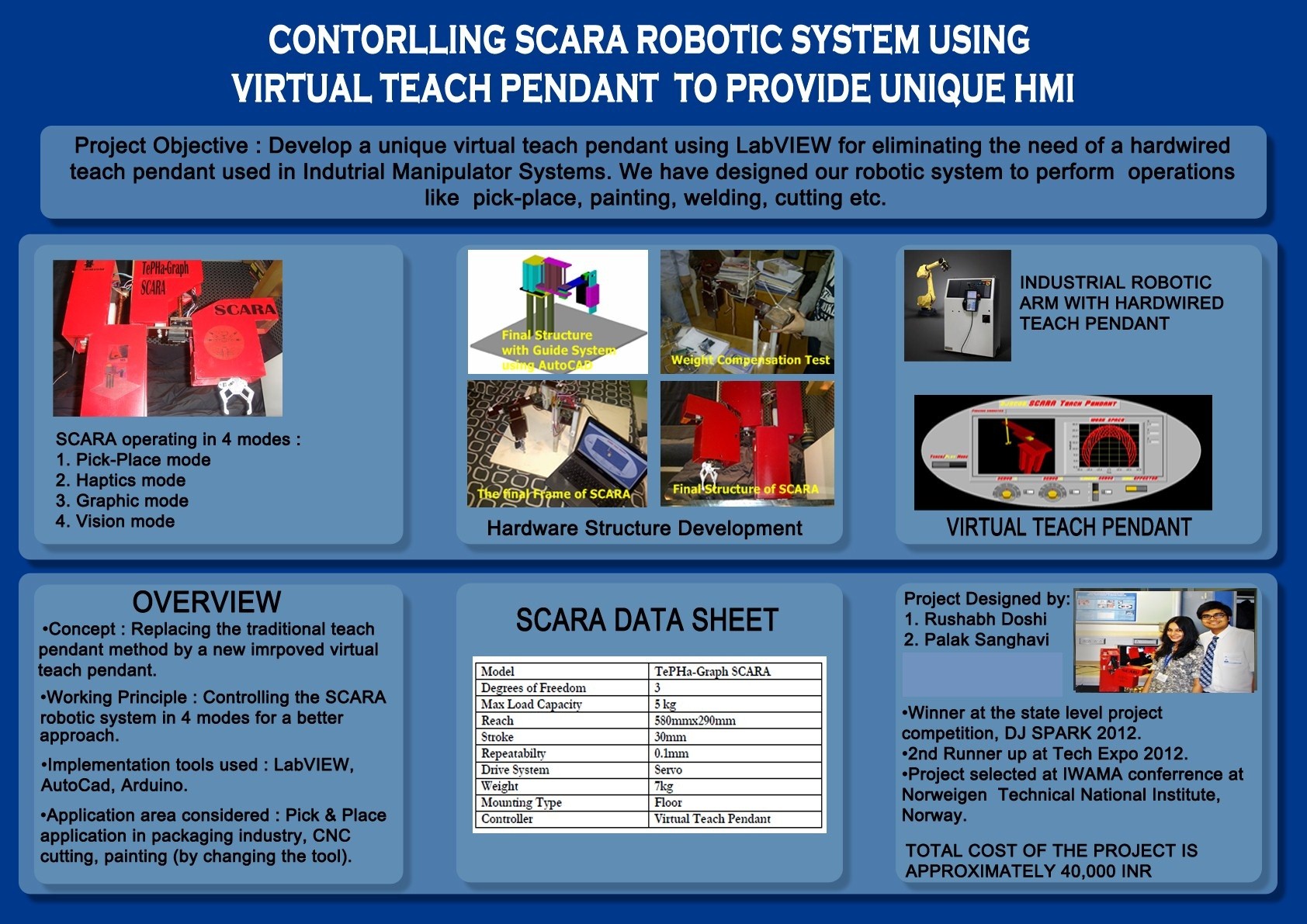
SCARA Tech Sheet
Model | TePHa-Graph SCARA |
Degrees of Freedom | 3 |
Max Load Capacity | 5 kg |
Reach | 580mmx290mm |
Stroke | 30mm |
Repeatabilty | 0.1mm |
Drive System | Servo |
Weight | 7kg |
Mounting Type | Floor |
Controller | Virtual Teach Pendant |
The Videos of Working Model :
LabVIEW helped develop the GUI for a better HMI. Also, replicating a hard wired teach pendant into a virtual instruement was done very effectively using LabVIEW.
The rich toolkits helped us develop the project faster.
Videos of the Project Working -
1. Detailed Explanation of the Project :
http://www.youtube.com/watch?v=sNUyVge4e-g
2. Run-Time Demos of the Project in 3mins:
http://www.youtube.com/watch?v=HjnNxQ9aK4Y
3. Phase 1 of SCARA system:
http://www.youtube.com/watch?v=rjnwy2vj8bo&feature=g-upl&context=G226acc1AUAAAAAAABAA
4. Phase 2 of SCARA system:
http://www.youtube.com/watch?v=jmsxw0wqhro&feature=g-upl&context=G27a7a8dAUAAAAAAAAAA
Nominating the Professors:
Prof. Ritesh Singh, Senior Professor, D J Sanghvi College of Engineering, Mumbai Univeristy, India
Ritesh Singh Sir helped us with Robotics doubts and helped us understand the scope for such a project by introducing us to an industrial manipulator at Baghubai Polytechnic Institute where we studied an industrial SCARA and jotted down its minus points to improve Roobtic systems.
Prof. Mayur Parulekar, D J Sanghvi College of Engineering, Mumbai University, India
Mayur Parulekar Sir introduced us to the LabVIEW software and encouraged the project to develop the virtual instrument. He uses LabVIEW extensively to develop other projects at the Innovation Laboratory at the University.
Project Awards:
1. Best Project Award in Maharashtra State, India at DJ Spark,Mumbai 2012
2. Research Paper of Phase 1 published in Technofocus Magazine, ISBN: 978-93-82062-20-2
3. Deatiled Research Paper Selected at IWAMA 2012 at SFI Norman, Norway


Picture at the IWAMA 2012 Conference, NTNU, Trondheim, Norway !

Instructions on How to Vote:https://decibel.ni.com/content/docs/DOC-16409
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Superb work Rushab and Palak !!! all the very best !!!
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
gr8 job...
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
great ... best of luck
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Thanks guys 
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
superb....best of luck!!
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
nice
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
g8 work guys...all the best!!!!!!
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
awesome..... all d best!!!
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Excellent work Rushabh and Palak, all the best!!!
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Hello Rushabk and Palak!
It is really heartening to to see you develop such a useful and industry relevant application using NI !
I feel proud of having coached you guys.
Looking forward to see your final video 🙂
Good luck!
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Dear Raghu Sir,
Thanks for the most awesome training on LabVIEW  to help us reach this level !!!!! We really miss the sessions a lot
to help us reach this level !!!!! We really miss the sessions a lot 
Will post the video soon
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Hey rdd0101,
Thank you so much for your project submission into the Global NI LabVIEW Student Design Competition. It looks great! Make sure you share your project URL (https://decibel.ni.com/content/docs/DOC-20973 ) with your peers and faculty so you can collect votes ("Likes") for your project and win. If any of your friends have any questions about how to go about "voting" for your project, tell them to read this brief document (https://decibel.ni.com/content/docs/DOC-16409). Be sure to list the team member names along with the faculty advisor name in the "Contact Information" section at the top. If your team is interested in getting certified in LabVIEW, we are offering students who participate in our Global NI LabVIEW Student Design Competition the opportunity to achieve certification at a fraction of the cost. It's a great opportunity to test your skills and enhance your resume at the same time. Check it out: https://lumen.ni.com/nicif/us/academiccladstudentdiscount/preview.xhtml.
Good luck!
Sadaf in Austin, Texas
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Thank you all For Voting
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
GOOD WORK..............
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Hey Rushabh,
Great work. All the best.
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
gr8 work..
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
impressive work guys..:)
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
nice work guys...u r def an inspiration to me...i have mailed u my details..please see if u can help me..thanks a ton
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Good work, could be definately integrated in Industrial Robotics .
This project can increase the market of LabVIEW in Industrial Robotics
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
I would like to stress, that I really like your idea and that I am quite impressed by some of the work that you've done.
We all like the open source spirit of your project. At the moment most manufacturers of industrial robots are using their own programming language, which makes it impossible to port a program from a robot of one manufacturer to a robot of a different manufacturer. This is very inconvenient and an open and common way of programming the robots of all manufacturers will hopefully emerge sometime.
I like the 3D animation of the robot. It is very useful and not all teach pendants are actually showing that yet.
It is very good that you made your system easy to integrate into other simulations. When I was still in industry there were efforts to make the start-up of e.g. production lines faster by pre-tuning and testing all the individual parts and components and how they work together in simulation. But I don't know how far this effort has gone and what the standards for data exchange are. But maybe you have already received feedback on that at the IWAMA.
Nice work
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Good work & All the best, may you win ! 🙂
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Excellent worK!!!!
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
hello,
excellent work,
Could you post your libaries here please.
cheers
