- Document History
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
Contact Information
University: Park College of Engineering and Technology (India)
Team Members (with year of graduation): (1) Subhadra.S
Faculty Advisers:
Email Address: subhadras10@live.com
Submission Language : English
Project Information
Title: Autonomous Robotic Wheelchair using LabVIEW
Description:
The system is aimed to design with the following features – Obstacle detection, Automatic Navigation System, movement on stairs, slippery and uneven surfaces and artificial intelligence control. Our prime focus was to build a wheelchair that could climb a staircase which was entirely an mechanical work. This part is to be interfaced with the SB-RIO using the FPGA VI LabVIEW.
The Ultrasonic sensors are used to detect the presence of object and to measure the distance to obstacle in the path. It works by the principle of measuring the time a sound wave takes to propagate from the sensor, to an object and back to the sensor. They are generated by a transmitter and reflected by the target. The returning waves are detected by a receiver. The time delay is used to measure the distance to the object. The farther away an object is, the longer it takes the sound wave to propagate. Object colour and/or reflectivity don't affect ultrasonic sensors which can operate reliably in high-glare environments. The information about the obstacle is sent to the main controller. As soon as the obstacle is detected the device takes another path away from the object avoiding collision.
Products
NI Product(s) Used: Single Board RIO
The Challenge
The main aim of the project is to design and develop an autonomous robotic assistive aid navigation system for disabled. We focused on the basic fundamental works in developing a robotic assistive system that involves the movement that enables the user to have command over the robot, its direction of movement with the help of sensing and alarming the user about the obstacles in the path to avoid collision. We used gesture movements captured in an camera made by the user to move the wheelchair.
The problem was with the “accuracy”. The camera could not able to recognize the gestures that the user tends to give due to the resolution and background variance.
The other important challenge was selecting a dependable processor which is flexible for any application. Not all the processors were very adaptive to take the input operations we give and output with better accuracy. We needed an processor which is opt for mechanical as well as software application of staircase climbing and gesture command respectively.
The Solution
We needed a hardware that is flexible to take the input from software and also externally from the commands from user. Single Board RIO – 9611 with built in FPGA was very convenient to deploy the programs directly using LabVIEW. SB RIO with built in FPGA was very compatible to develop the applications we needed.
Application of NI product used:
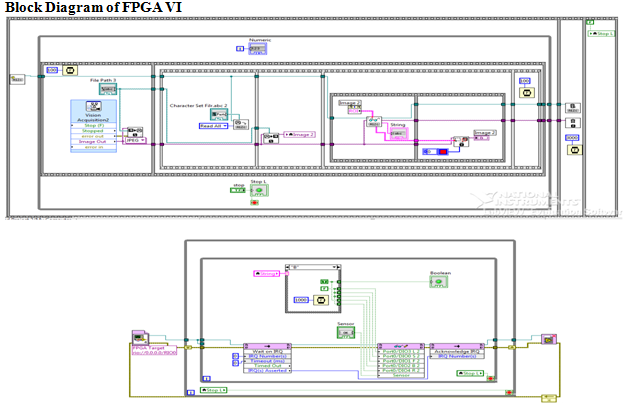
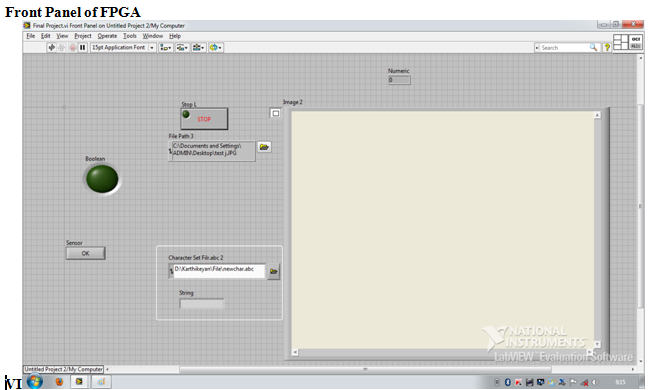
We used NI Single Board Rio – 9611 as the processor unit. We needed to build our program to run in labview in the FPGA VI window. The sb-RIO vi pane do not support global variables, string and File I/O, so we had to construct the block diagram and connect the labview vi with the FPGA vi. Thus the robot is controlled through the software.
Application Area: Embedded Systems
Compared with the other products:
Using NI product we were able to develop the robot on a single platform and it was very adaptive for deployment of number of programs we needed to run the system. It was very easy to access due to the drag and drop option in the block diagram pane.
We could use the NI DAQ too which also provides the platform we need for out project but sb-RIO had some more additional benefits. We could directly deploy and run the system without the use of external PC. The sb-rio was developed entirely support the robotics application and that is what we were exactly looking for.
The basic classes provided by NI student Training Programmes and the assistance from the NI staffs was very helpful to complete our project.
Conclusion:
We used NI LabVIEW and Single board RIO with various I/O modules to rapidly integrate the mechanical, electrical and software elements of our design into a functional robot. We were able to develop an entirely autonomous system with powered manoeuvrability and use of non hefty harwares with the help of labview.
Photo(s):



Others
Video Link: http://youtu.be/X912ttZ898Y
