From Friday, April 19th (11:00 PM CDT) through Saturday, April 20th (2:00 PM CDT), 2024, ni.com will undergo system upgrades that may result in temporary service interruption.
We appreciate your patience as we improve our online experience.
From Friday, April 19th (11:00 PM CDT) through Saturday, April 20th (2:00 PM CDT), 2024, ni.com will undergo system upgrades that may result in temporary service interruption.
We appreciate your patience as we improve our online experience.
Contact Information
Competition Year: 2016
University: Aarhus University School of Engineering
Team Members: Tor Dam Eskildsen (Bachelor's degree 2016) & Thomas Juul (Bachelor's degree 2016)
Faculty Advisers: Claus Melvad, Assistant Professor, Aarhus University School of Engineering
Email Address: thomas@juulsminde.dk & eskildsen180@gmail.com
Country: DK
Project Information
![]()
Figure 1: Site of reseach on the fjord ice near Kangerlussuaq
Title: Deep Freeze ROV
Description: An underwater robot for Arctic research
Level of completion: Mk1 fully functional
Build time: 4½ month
Products: Software: LabVIEW, LabVIEW Real-Time Module, NI MyRIO toolkit, NI Vision Development Module, NI Vision Acquisition
Hardware: MyRIO-1900, 3 x digital cameras (Pointgrey Blackfly incl. lenses), Ethernet switch, ROV
Why Study Ice Algae?
Ice algae represents the main food source for all life beneath the ice covered Arctic ocean (more than 5 mill. km^2). Furthermore algae has significantly contribution to the global CO2 absorption and the ability to store CO2 on the bottom of the ocean. A detailed understanding of ice algae is therefore essential for developing accurate climate models and fishing quotas.
The Challenge
To achieve a better understanding of the Arctic environment and dynamic effects in this area, the SIAP-project (Sea Ice Algae Photobiology) is studying the ice algae which lives under and within the sea ice (figure 2). This includes developing new methodologies for studying the algae without affecting it - which contrasts with current methods, which require thawing of the ice. The new method assesses the photosynthetic parameters of the algae on the underside of drilled ice cores (figure 3).
However, to further enhance the studies we need to analyze the algae within its own environment (i.e. without drilling ice cores). This requires conducting measurements such as light intensity, light spectrum and snowdepth, both underneath and on top of the ice.
|
Figure 2: In large amounts, ice algae can be easily recognized as a visible brown layer |
Figure 3: Example of an ice core
|
To fulfill these tasks, we required a rugged, reliable remotely-operated-vehicle (ROV). Unfortunately today's commercial ROVs are either unable to navigate the harsh Arctic environment (for comparing conditions above and below the ice), are too expensive, and logistically unsuitable for the expedition. Therefore, the main challenge for this project was to develop a short-range ROV that is able to maneuver and navigate underneath the fjord ice of Greenland, whilst ahereing to the following requirements:
The Solution
| Deep Freeze ROV in the field during expeditio | 1st launch of Deep Freeze ROV |
|---|---|
The resulting solution, the DeepFreezeROV, is a lightweight, highly-maneuverable, aquatic inspection robot, ready for under-ice deployment in Greenland. DeepFreezeROV utilizes four vector thrusters for precise and stable maneuvering in the horizontal plane, and two thrusters to maintain the desired depth. To ensure that the biological measurements are not disturbed by an active thruster, the ROV is designed with positive buoyancy, thus making it possible to "park" the ROV against the underside of the ice with the mounted spacer poles. The ROV navigates locally based on image processing as described in latter section.
|
Figure 4: Operating the ROV in the field
|
Figure 5: Deep Freeze ROV including tether and reference points |
|
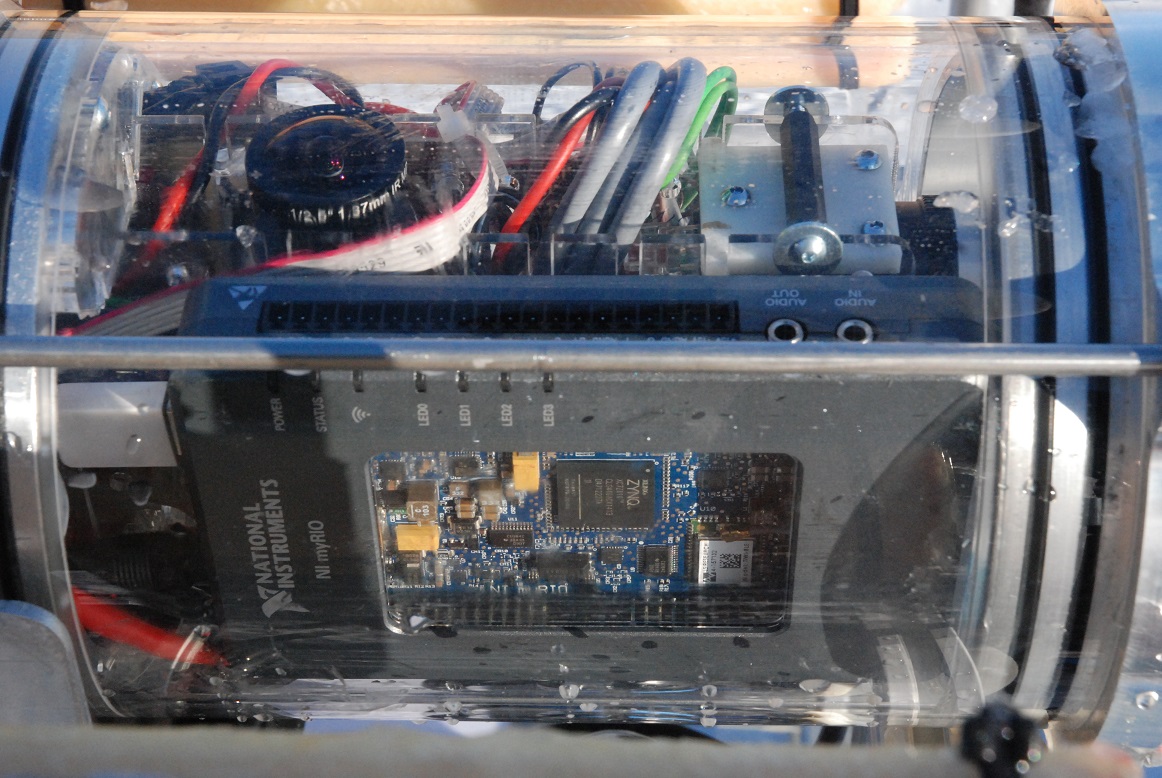
Figure 6: MyRIO - the brain and heart of Deep Freeze ROV |
Figure 7: One of the emitting reference points |
The ROV is connected to an operating computer through a tether that consists of three cables: Power (DC-current), data (Ethernet) and a separate cable for biologic studies (see figure 8). The Ethernet cable is plugged into a switch, housed within the DeepFreezeROV chassis, which is further connected to three cameras and an NI myRIO (a powerful, embedded controller that became the brains of the ROV). All the camera feeds are directly passed though the switch to the computer, where two of the cameras are processed in LabVIEW to descern current ROV position, and the third camera stream is simply displayed on a LabVIEW GUI for visual inspections and recovery (i.e. helping the operator guide the ROV to the deployment hole in the ice). The myRIO runs a real-time LabVIEW program which constantly sends and receives data from and to the operating computer (including acquired data from the pressurecell, compass and temperature monitor, while it is outputting PWM-signals to the thrusters).
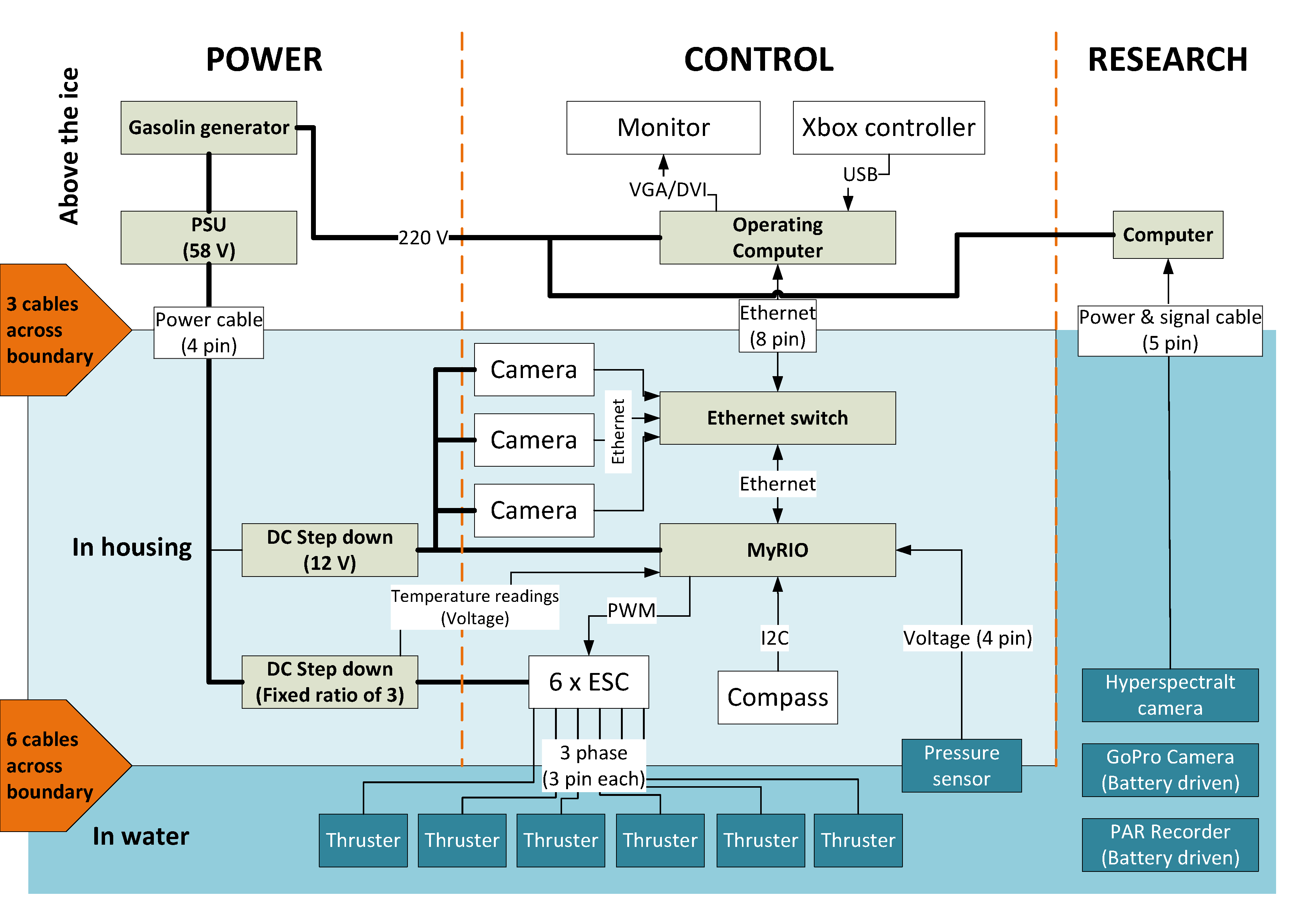
Figure 8: Connection overview
Maneuvering
To achieve a low-cost and intuitive ROV control, we used a Microsoft Xbox control pad. Integrating the control pad with the rest of our LabVEIW application was made simple, thanks to a ready-made function library downed from the LabVIEW Makerhub. This makes it possible for anyone who has operated an Xbox controller before to intuitively control DeepFreezeROV, without any additional training. Since the ROV has positive buoyancy, an autodepth module was constructed based on feedback from the pressure cell to further ease the control. The autodepth module is configured (figure 9) to allow the ROV to behave almost as if it was naturally buoyant.

Figure 9: Route diagram of the Autodepth module
Video-Based Positioning System
The positioning system enables the ROV to navigate locally with respect to the two reference points (figure 10). This solution is specifically designed for this expedition, as it is dependent on excellent visibility in the Arctic ocean. Our custom, light-based positioning system was a low-cost, and highly accurate alternative to commercial solutions.
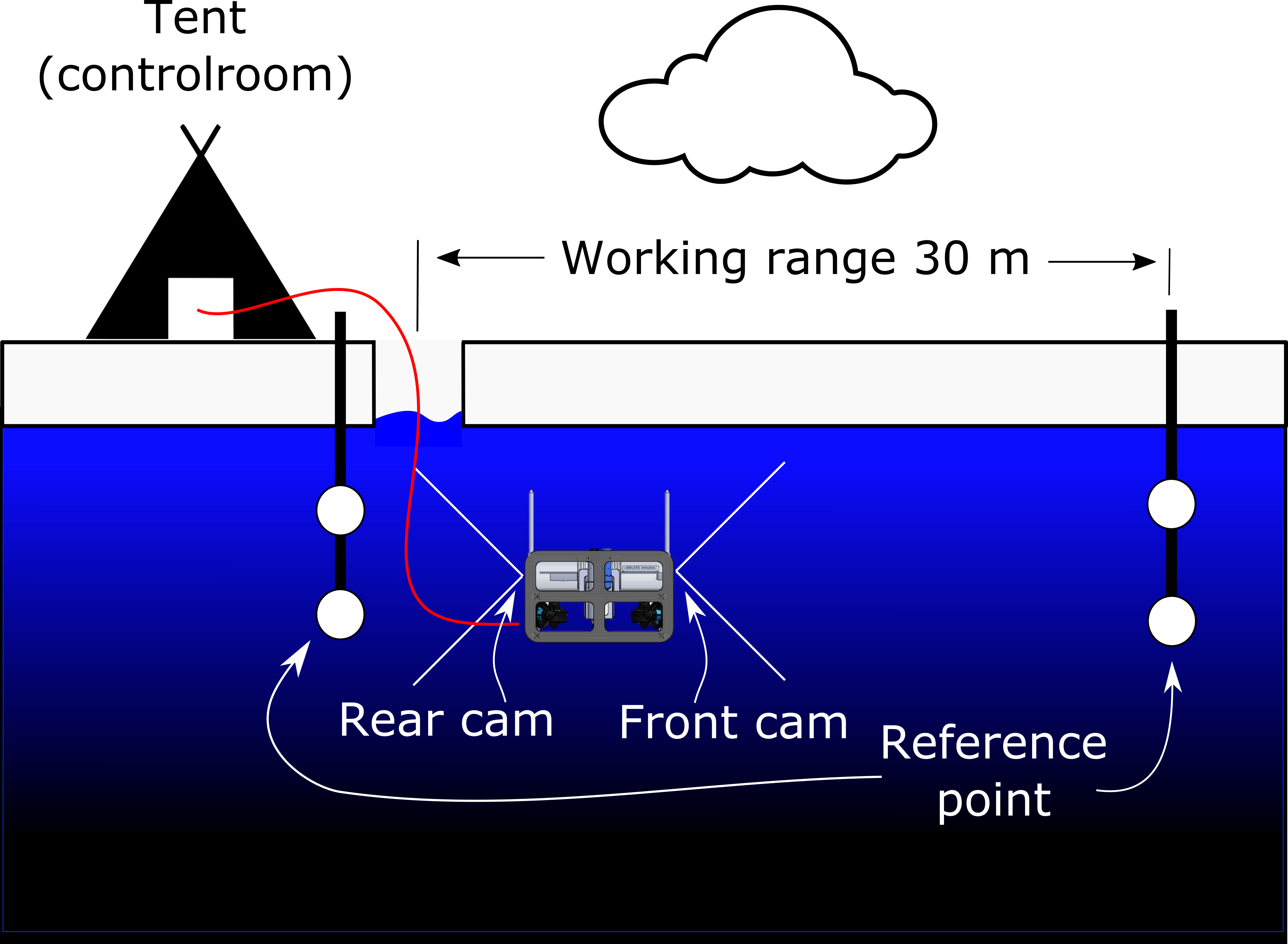 Figure 10: Physical overview of positioning system
Figure 10: Physical overview of positioning system
The positioning system uses two cameras - one looking forward and one backwards towards each reference point. The images is acquired and processed with LabVIEW. For image processing, we call the NI Vision Assistant from within LabVIEW to manipulate the image and extract salient information (Figure 12). From each image, the Vision Assistant outputs the number of pixels between the two lights on the reference point, aswell as the horizontal distance from the center of the image. This information is then converted to angles and distances with the use of a calibrated pixel to meter/angle curves. LabVIEW then processes the data using simple trigonometric functions to output the ROV's placement along the line and offset from the line. The process is also described in Figure 11.
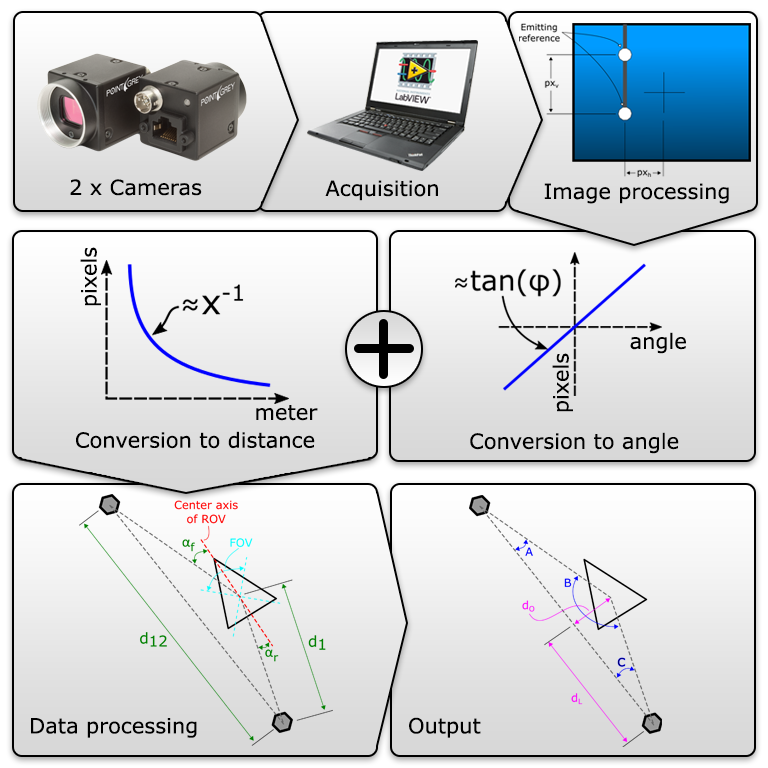
Figure 11: Steps in the positioning system

Figure 12: Image processing steps
Results
It is no secret that expeditions in the Artic Circle are no walk in the park!! Something happens when you cross the Polarcircle. We encountered quite a few mechanical issues. This manifested as corrupt connectors, bad termination, leaking seals and so on, but nothing that we didn't managed to solve in-situ, allowing DeepFreezeROV to fulfill its job (as seen on the Videos and Figure 13). As result, the biologists were able to gather all the information they needed. This acquired data is now being analyzed and, once done, could be used for computing global CO2 models and sustainable fishing quotas.
While the DeepFreezeROV's job is complete, we hope this project will inspire others to further develop the field of Aquatic ROVs, both in terms of functionality and price, so the vast, yet unexplored oceans can become better understood.
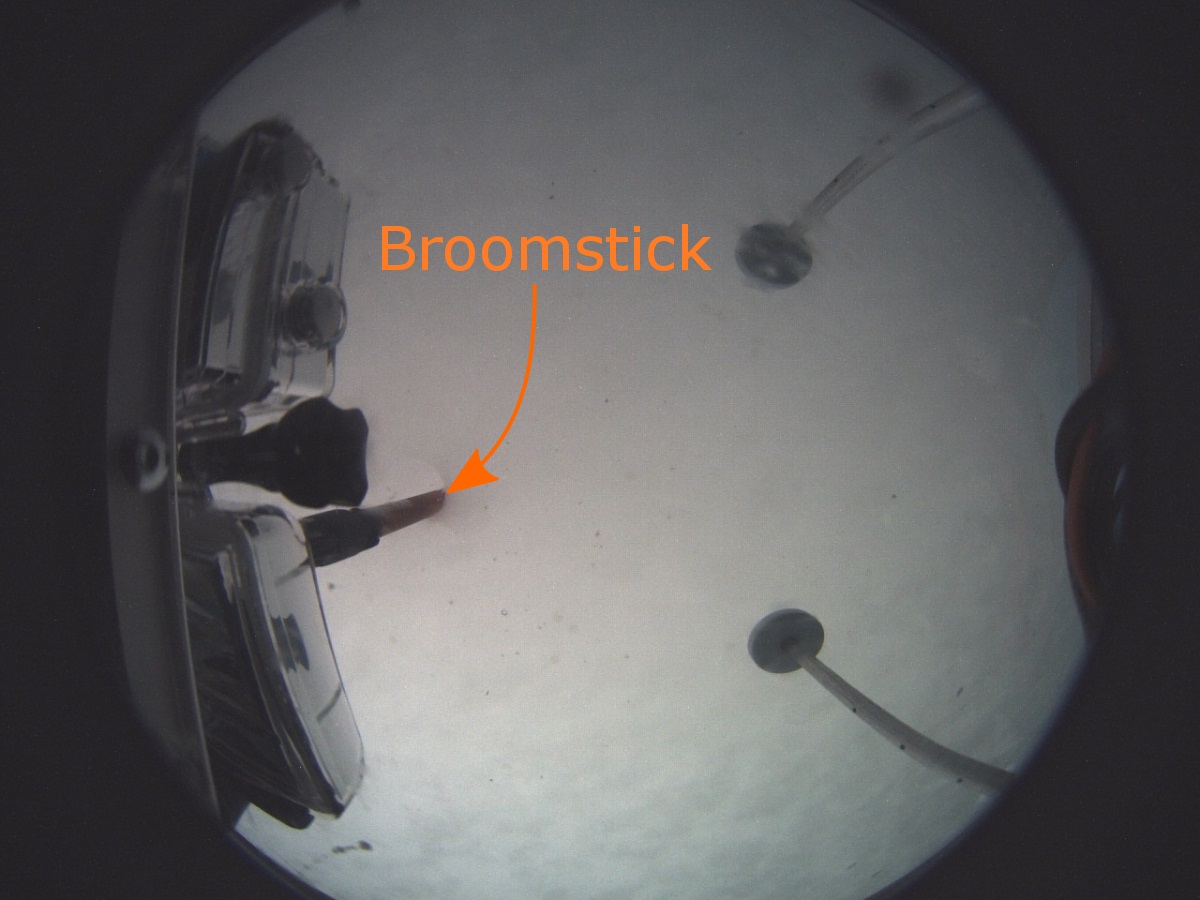 Figure 13: Picture taken with the "recovery"-camera for a simple positioning test in the field.
Figure 13: Picture taken with the "recovery"-camera for a simple positioning test in the field.
(The broomstick is inserted through a hole that was drilled based on information from the positioning system)
Benefits of the NI platform
The reason why we chose to use the NI platform is simple - it would've been impossible for us to achieve our goal with anything else. The powerful, yet intuative, programming language of LabVIEW, allows software newbies (we had less than 6 months of programming experience prior to this project) to develop incredibly advanced systems. LabVIEW along with NI Vision Development Module allowed us to not only prove a concept and construct a system, but to make it work within harsh, real-world enviroments. This is thanks to the graphical interface along with the many build-in functions and Assistants that makes programming fast and flexible. What is also great is the ability to deploy LabVIEW onto real-time, embedded targets like myRIO, with it's versatile options of inputs/outputs. This made it easy to rapidly test and change different configurations and equipment (we actually managed to program the entire controller system and thruster output in less than one day).
Nominate Your Professor
We would like to nominate our Assistant professor, Claus Melvad, who was the source of inspiration during this project and the one who introduced us to the field of Mechatronics and LabVIEW. Without his enthusiasm and inspiring lectures we would never have had the courage to take on this project. What is commendable about Claus is the way he engages his students and whenever possible lets the students be their own teachers allowing them to gain knowledge and develop skills. Combining this with project orientated teaching, we found ourselves on a exponential learning curve making it possible for us to program in no time. A good example of this is the "Mechatronics Challenge" where we (along with 3 other students) managed to construct a autonomous sumorobot (Click for video) during a course equal to 1/6 of a semester.
Thank you for your kind words; it is easy to be enthusiastic with such students as I am fortunate to have.
If students after you will be able to see beyond what you have achieved, it is because they can stand on the shoulders of giants. Those are your shoulders, Tor and Thomas.
Thank you that you chose me to be your guide.
Best of luck with your application, you deserve all the praise you are getting.
World class!
Personally, my final-year University project contributed to absolutely nothing 
But your project is facilitating world-leading research, and contributing to CO2 models and global fishing quotas. You should be very, very, very, very, very, very, very proud. A million congratulations
Amazing project!
Very impressive Student Application that shows what can be achieved when combining the flexibility of the RIO plaftorm, creative mindes of the students and great execution of the project!
Congrats!