- Document History
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
(Make sure you follow all the 3 steps involved in submission. This is only Step 2 of 3. For details, visit http://bit.ly/16iNfUL)
Contact Information
Name of the College: Dr Ambedkar Institute of Technology
Name of the Team Members along with their respective current semester :
Sharath Kumar R (7th Sem)
Vasanth S Y(7th Sem)
Supreet A Joshi(5th Sem)
E-Mail Address & Phone Number of the Team Leader :
+91-7204344035
Name of the Faculty Guide :
Prof. Shylaja.K.R
E-Mail Address & Phone Number of the Faculty Guide :
Project Information
Project Title:
RAIDEN(The Drunkard Bot)
Hardware & Software Used:
Arduino Uno
H-bridge
Accelerometer
Gyrometer
HoobyKing 2.4GHz Trasmitter and Reciever
What challenge/problem are you trying to solve through your application:
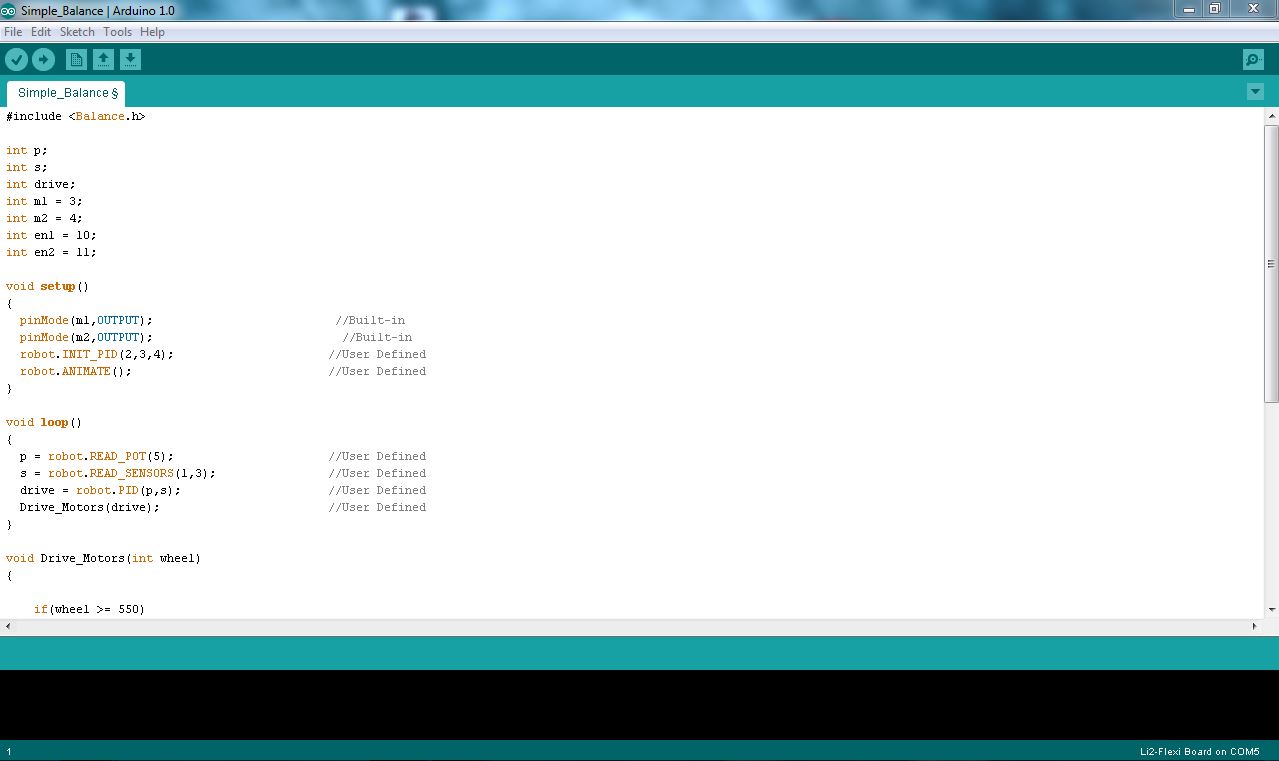
Making a robot to balance itself on just 2 wheels(Trying to solve Inverse Pendulum Problem)
How does your application solves the above mentioned challenge/problem:
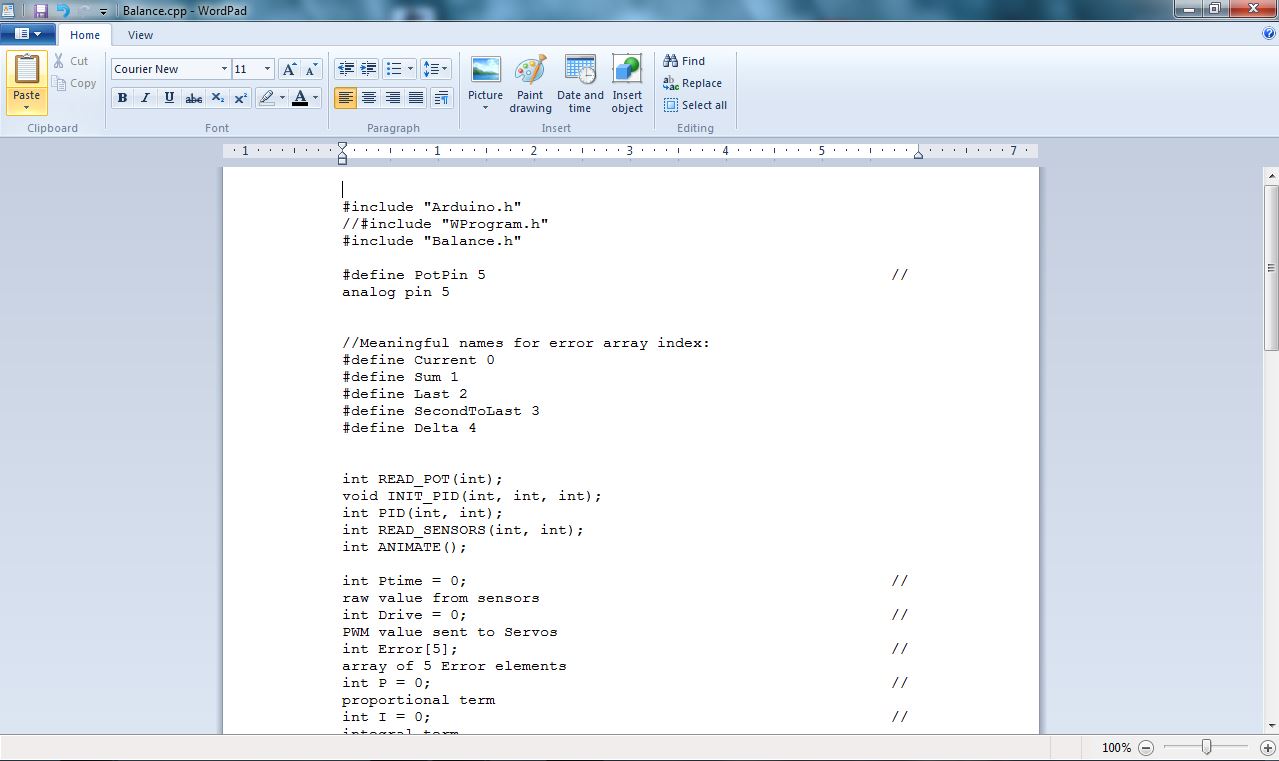
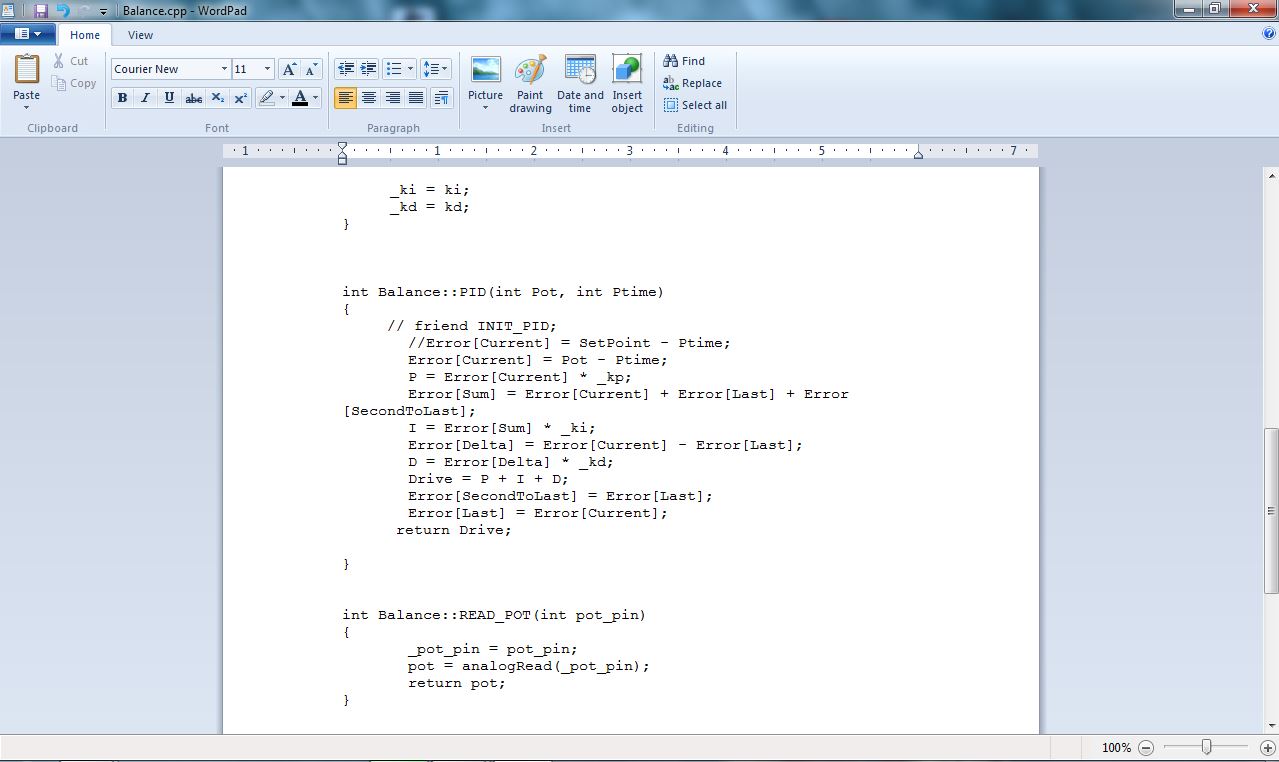
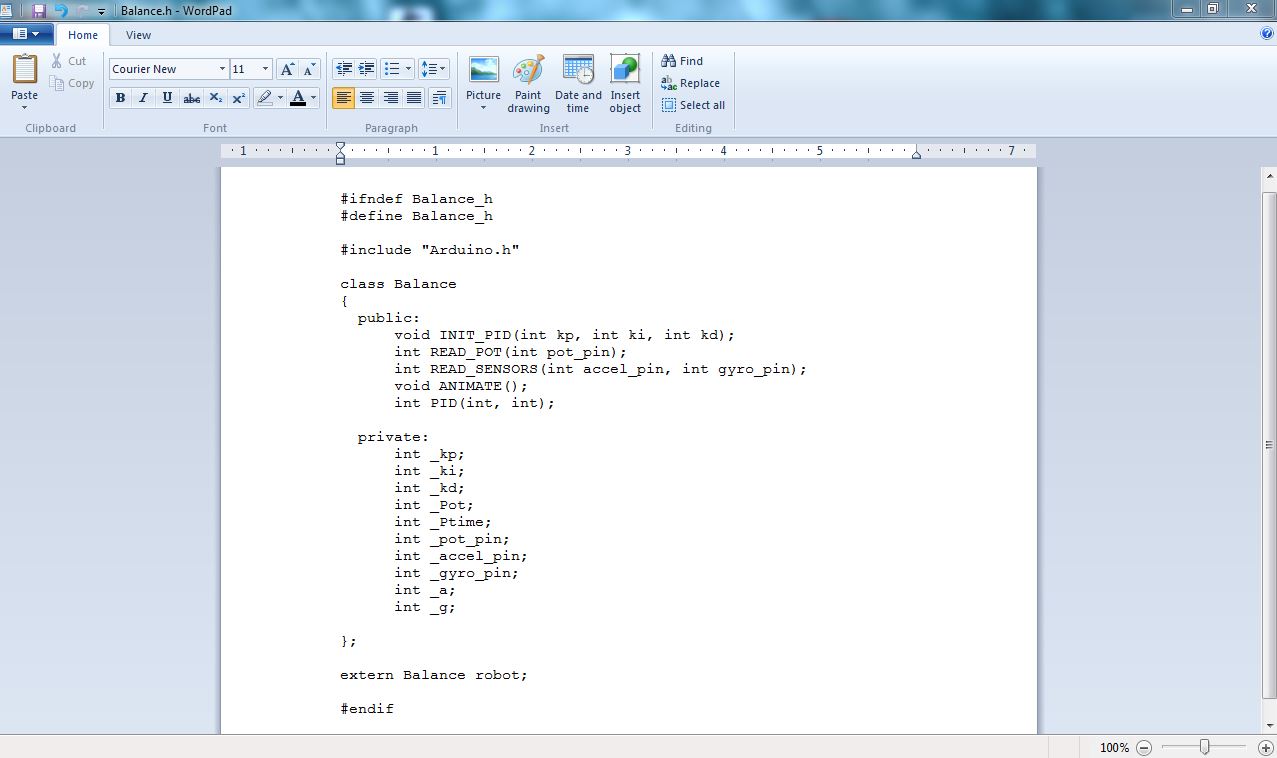
By using PID Control Algorithm. No filters has been used. So, further implementing kaplan/differential filters, the system becomes more stable
Description of Project:
The self balancing robot is a two wheeled system through concepts such as gyro-stabilization, center of mass and sensor output filtering.It uses the concept of PID control, PWM and the principles of balancing
Insert Images Here:
YouTube Link of Video:
http://www.youtube.com/watch?v=jjnJzvSi8x8&feature=youtu.be
Insert the Video here:
