- Document History
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
New Student Design Competition: <Self balancing myRIO robot>
Contact Information
Competition Year: 2016
University: Bergen Tekniske Fagskole
Team Members: Mads Eliassen, Rune Fagrelon, Anita Frestad
Faculty Advisers:
Email Address: elektro89@gmail.com
Country: NO
Project Information
Title: Self balancing myRIO robot
Description: Self balancing myRIO is a project of the classic inverted pendulum problem. Our goal was to see if we could use myRIO and LabVIEW to learn the basic of modeling a system by simulation and afterwards build it as a physic robot and test it live.
Products:
N
NI Lab
Software
NI LabVIEW
LabVIEW Control design and simulation model
NI multisim (drawing)
Hardware
myRIO
PmodGYRO card
PMOD DHB1
PC/LAPTOP
Quanser Cube (testing)
Software
NI LabVIEW
LabVIEW
The Challenge:
The inverted pendulum is a pendulum which is in constant imbalance and requires an external force to remain stable. This can be movement of the tilting point or the torque applied to the fulcrum .We're going to look at how we best can "tune"/controll such a system by choosing a good PID parameter . So our goal is to find the perfect proportional , and derivatbåndet parameter for our PID controller. We didnt use Integral(I).
The Solution:
We started with making a matematic model of the system
The final project deliverable was a simulation of the inverted pendulum "math modell" and a working self-balancing robot that can be controlled by PC to move back and forward while it keeps it balance.( myRIO robot video).
<Explain the benefits using LabVIEW and NI tools.>
The benefit of using LabVIEW and NI tools for our project was that all group members was able to test and work on the project. We all are located in different part of the country and because of that we needed to find a solution which made it possible to cooperate as a group despite the distance. We also needed a solution that made us able to do all part of the project in a way that made us learn and document.
We found the LabVIEW Control Design and Simulation Module to be very useful to test the mathematic model in a practical way that made us easy see the benefit of modeling a system. The graph made it easy to see the reaction of an input step signal to our transfer function and how it affected the stabilities of the wagon and the pendulum.
By using LabVIEW programming for our robot, we see the benefit of using graphical programming instead of text coding. Its saved us time and knowledge. As we didn’t know much about text based programming and it would take a lot of time to learn. We also find myRIO perfect, as it had so many opportunities. We find the wireless communication in myRIO perfect. It made us able to control our robot wirelessly. This also made it possible to test the robot balancing without disturbance, something an attached cable could cause.
We have been using the Quanser cube a lot to be able to build understanding of modelling a system like the inverted pendulum. The thing we liked about the Quanser was that it was simple consisting of only a servomotor and a pendel the course material included was good described and it was also step by step learning. Using both theoretical and practical example. The math used in the inverted pendulum is way beyond our technical skills that made us forced to look “outside the box” and learn the system by transferring the diff equation to S-plan transfer function instead and define a area where we assume the system to be stable and linearize equation and therefore possible control.

myRIO (photo 1)
<Attach VI code (optional).>
<Level of completion : fully functional
Our project team has logged 1200 hours total.
<Additional revisions that could be made>
Attach Poster
(30 in. x 38 in.) and LabVIEW Code
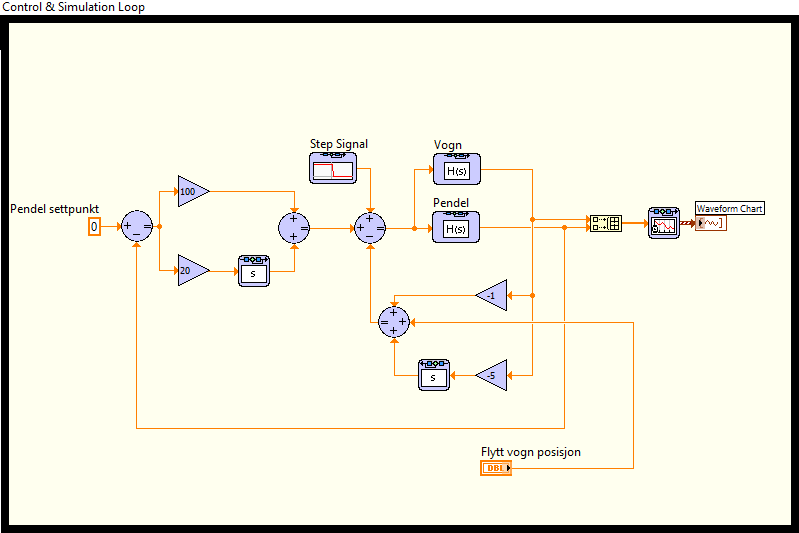
LabVIEW code " simulation of the inverted pendulum based upon math modell"
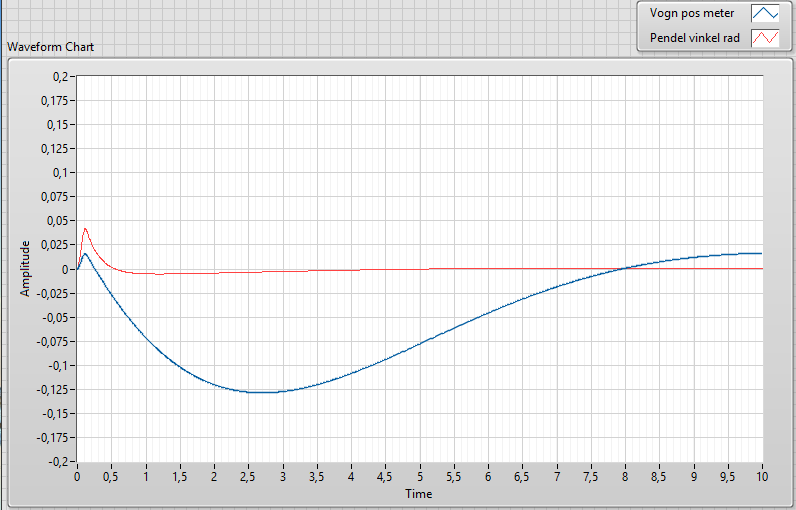
Finding the best input for the PID in the math modell. The graph shows the reaction of changing the parameter of the paralell PD controller that controlls the Wagon and the pendel.
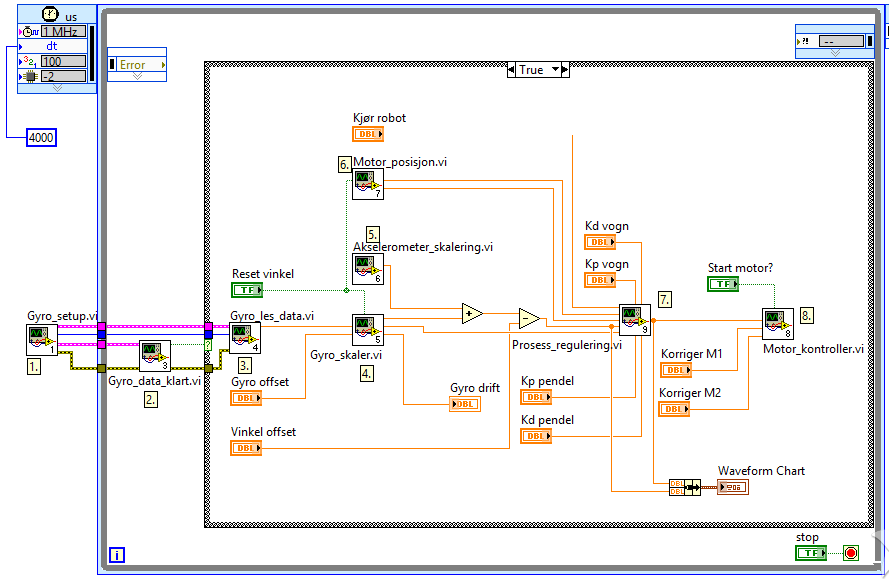
Part of the program for the self balancing robot
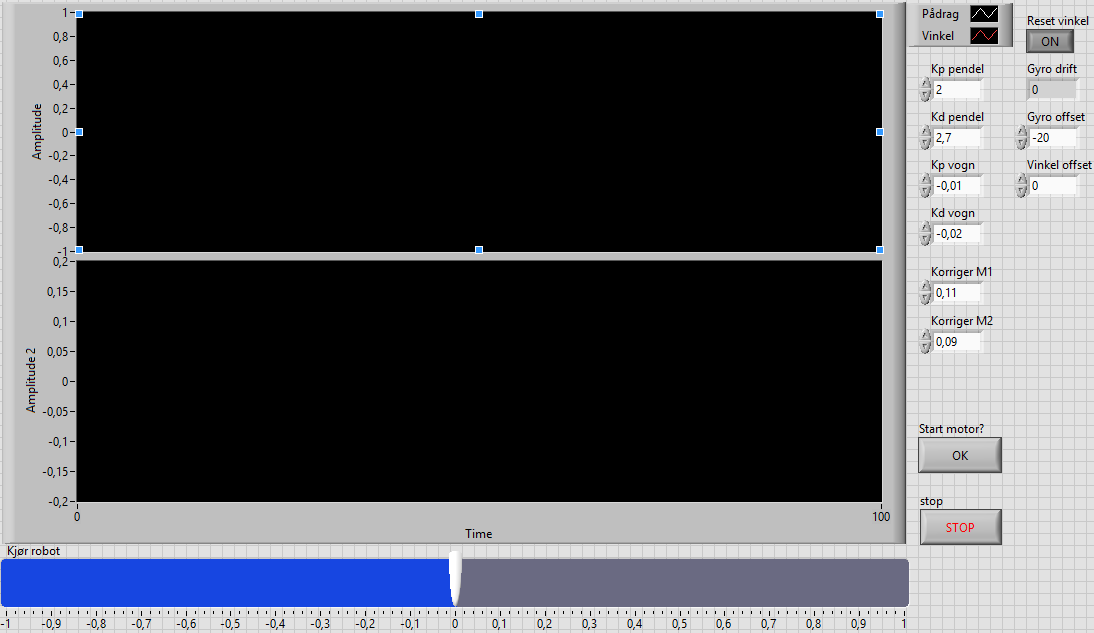
The front panel of the program that controll the robot .
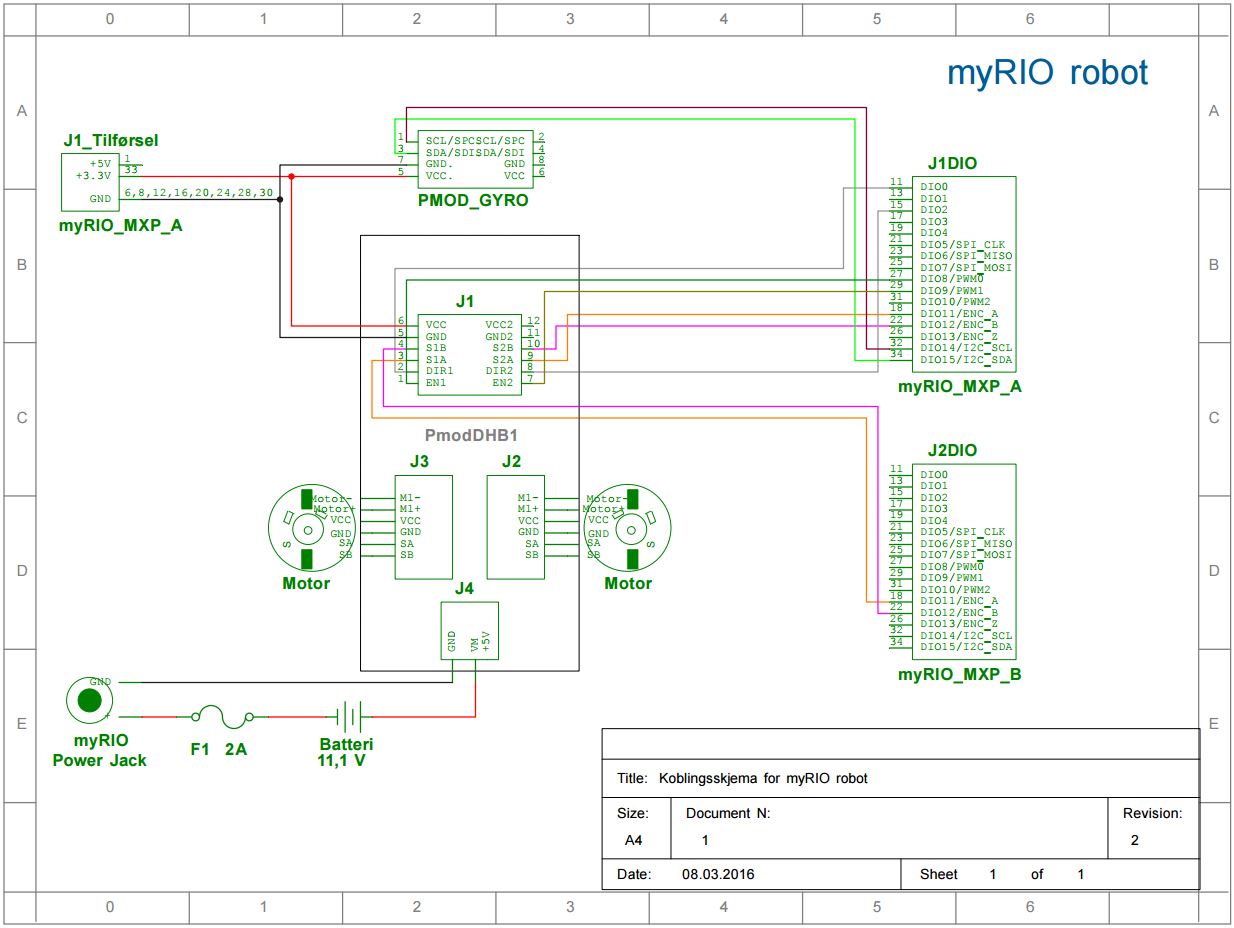
Wiring for the myrio robot
<Include captions for all graphics material. Type your photo or graphic caption underneath each graphic using this 10 pt Times New Roman font. Embed all graphics. Remember—you must provide individual electronic files for each graphic you include in your paper. Place photos in text after first reference—you must include a reference to all graphics in the text. Include screen captures if you use National Instruments software products. Screen captures must have a minimum resolution of 72 dpi at 100 percent. All other graphics must have a minimum resolution of 300 dpi.>
Nominate Your Professor (optional)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
