- Document History
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
New Student Design Competition: Innovative cruise control for electric vehicles with motor speed reference generation
Contact Information
Competition Year: 2016
University: Università degli studi di Roma Tor Vergata
Team Members (with year of graduation): Khalid Hajjy(2016) Gianluca Santesarti(2016)
Faculty Advisers: Cristiano Maria Verrelli, Marco Tiberti
Email Address: khalidhajjy@live.it sante-pietro2@hotmail.it
Submission Language: English
Project Information
Title: Innovative cruise control for electric vehicles with motor speed reference generation.
Description:
We consider electric vehicles with fixed transmission gear ratio powered by centralized electric motors. The main goal in control problems concerning electric vehicles with induction motor propulsion is the regulation of the vehicle speed v to a vehicle speed reference v*(generally assumed to be constant). In classical cruise control the goal is achieved on the basis of the vehicle speed regulation error only; in this innovative control this error is used to generate an auxiliary rotor speed reference. The resulting control thus includes two loops.
Products:
NI myRIO-1900, LabVIEW 2015 student edition, LabVIEW FPGA module, LabVIEW myRIO 2013 toolkit.
Other hardware or software: LRP-S10 Blast tc2 r/c car scale model 1 to 10, encoder Avago Technologies HEDS-5500#A06, Adafruit-Ultimate GPS Breakout v.3.
The Challenge:
The goal is the implementation and experimental verification on a r/c electric model car of the innovative algorithm exposed in the paper: R. Marino, S. Scalzi, P. Tomei and C.M. Verrelli, "Fault-tolerant cruise control of electric vehicles with induction motors", Control Engineering Practice, vol.21, no.6, pp.860-869,2013. The advantage of this innovative control relies on ensuring larger robustness and greater stability compared to the classic one, owing to the aforementioned double loop control architecture.
The Solution:
To successfully test the control algorithm with repeatable results, the experiments are carried out indoor in the laboratory, by “simulating” the vehicle speed profilesthrough off-line experimentally identified functions (referred to as g -functions) which relate the motor speeds to the vehicle ones at steady-state and which obviously depend on the vehicle type and external conditions.
The algorithm idea

Fig.1 Block scheme
The key-idea of the overall algorithm (supported by a rigorous stability proof) is to include an additional inner motor speed control loop to the vehicle speed one in the classical cruise control.
The vehicle speed error (between the measured vehicle speed and the given reference) characterizes the outer loop, in which a PI control on the vehicle speed regulation error generates a converging estimate of the unknown constant motor speed reference guaranteeing vehicle operation at the desired speed; the motor speed tracking error (between the measured motor speed and the corresponding generated reference) then characterizes the inner loop, in which a second PI control on the motor speed tracking error generates a duty cycle for PWM modulation, that is proportional to the supplying torque.
Cruise Control VI

Fig.2 Front panel
As you can see in the front panel the program has two main modes manual e cruise control.
Through the two sliders on the left, steering and acceleration are controlled with the function "key navigation" being introduced to have a faster action by laptop computer. The profiles for the main variables are also explicitly reported.
The block diagram is divided into two “while” loops: the first one on the left is for the motor speed reference generation working at low frequency (600 ms); the second one is to control the duty cycle for PWM modulation and the steering which works at a higher frequency (60 ms); both loops realize the two PI controls in a discretized form.
Finally, the "escape" function (realized by a simply shift register and actually analogous to the use in real cars of the gas pedal when the cruise control is activated) allows a prompt return to manual control.
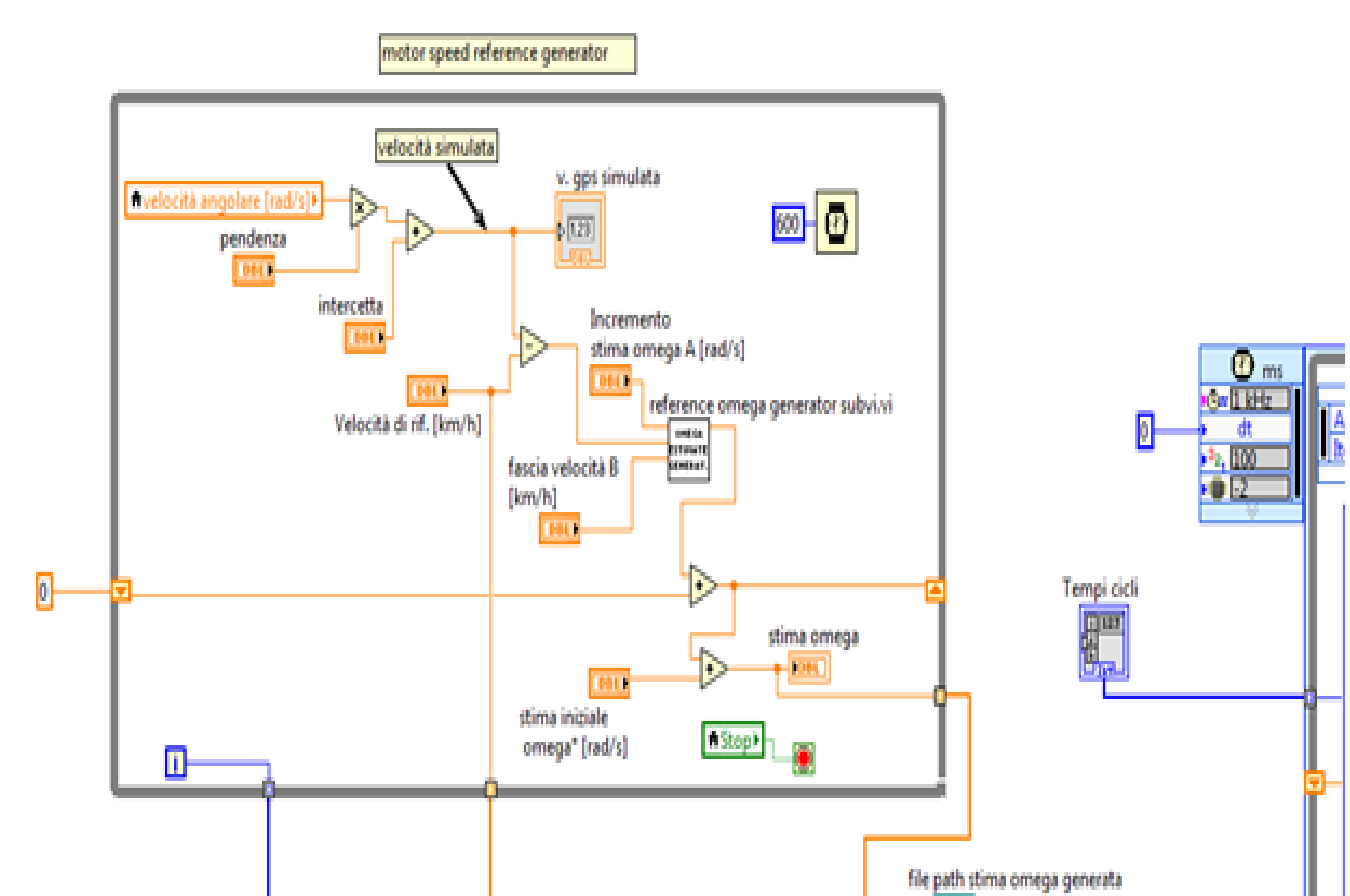
Fig.3 Block diagram left
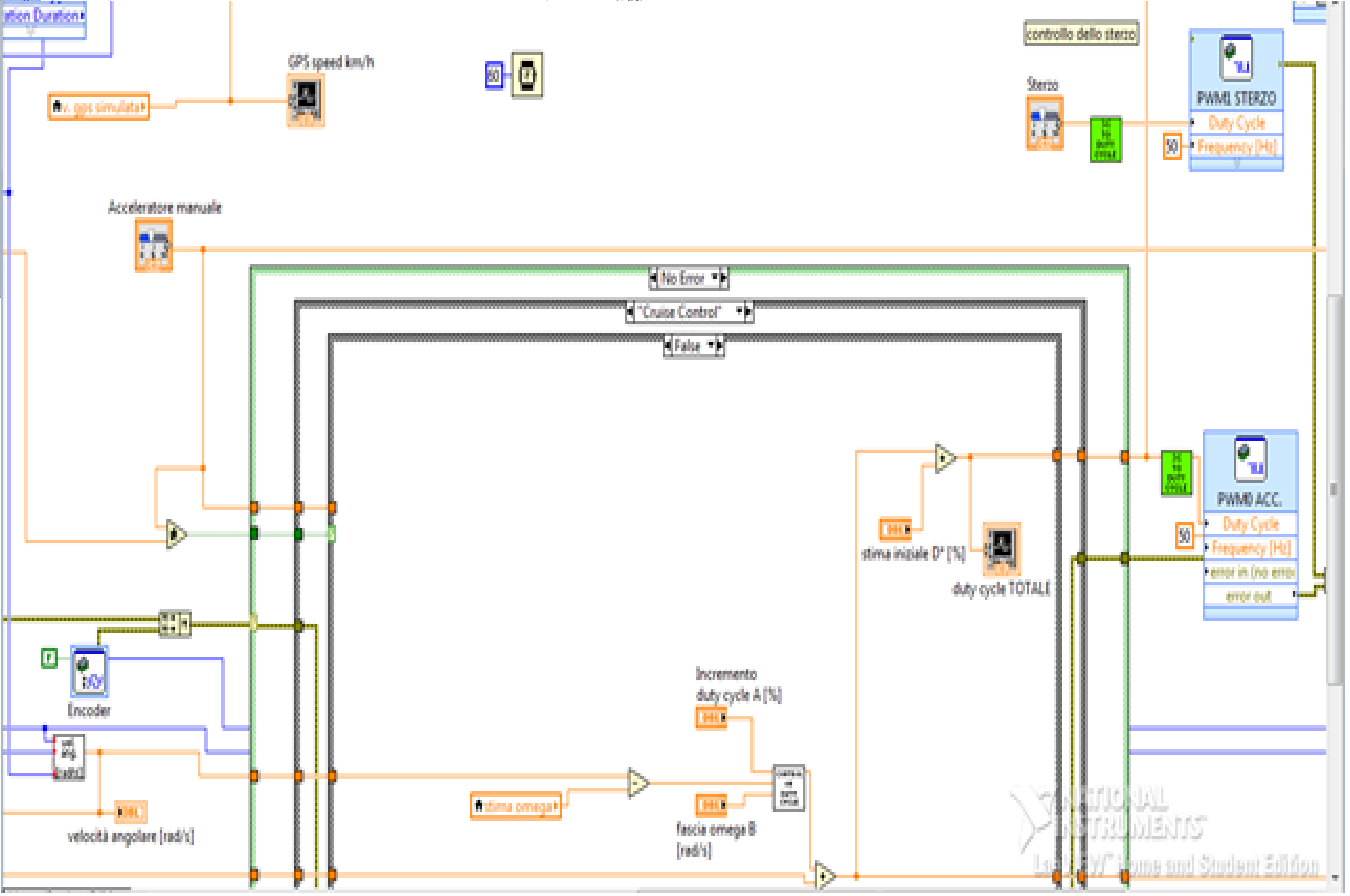
Fig.4 Block diagram right
Experiment
The illustrative experiment is divided into five steps:
- at the start the manual mode is on;
- after defining the vehicle and the external conditions through the g-functions and the cruise reference speed to 7Km/h the cruise control is activated;
- after a short transient in which the vehicle speed converges to its reference, the cruise reference speed is increased to 15 Km/h;
- after a short transient in which the new convergence occurs, the external conditions vary and the cruise speed is set to 12Km/h;
- finally the speed reference is decreased to 9Km/h and the experiment ends.
Satisfactory results are actually achieved, as shown in the related video.
https://drive.google.com/open?id=0B3NEnEwH4J4HZFMwZUpLR1JpSHM
Why LabVIEW and myRIO?
Thanks to graphical language of LabVIEW it simply to approach to programming world even by novice people, it's simply to find the bugs and to have a total overview of the program and all of its features.
The possibility to have some toolkit provided by the NI, that include preconfigured VIs as Encoder.vi or PWM.vi makes the work less hard.
Also it is advantageous work in team using LabVIEW thanks to his modulation and subVIs, and to find a lot of example in the community.
The extreme compactness and resistance of myRIO guarantees an easy mounting on the RC car used in the experiment; also the integrated FPGA allows a significant reduction in programming time.
The high number of analogic, digital and UART input/outputs allows interfacing with many sensors.
Level of completion: beta
Time to build: one month and a half.
Additional revisions
The next project is that to implement the change exposed in the paper
“Automatic Rotor Speed Reference Generator for Electric Vehicles Under Slip Constraints”,L. Pasquale ; S. Scalzi ; C. M. Verrelli IEEE Transactions on Intelligent Transportation Systems (Volume:16 , Issue: 6 ), which allows on the basis of a contraction mapping algorithm and without requiring any a priori knowledge of the external conditions, a sequence of speed refeence values to obtain the convergence to a steady-state operating point with a safe tire longitudinal slip.
Attach Poster

Fig.5 S10 Blast&myRIO
Nominate Your Professor
The people who assisted us were Prof. Cristiano Maria Verrelli about the algorithm and Prof. Marco Tiberti about the LabVIEW software and NI hardware. They introduced us to the world of the automatic and we have learned a lot about feedback control systems and electronic hardware.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
