From Friday, April 19th (11:00 PM CDT) through Saturday, April 20th (2:00 PM CDT), 2024, ni.com will undergo system upgrades that may result in temporary service interruption.
We appreciate your patience as we improve our online experience.
From Friday, April 19th (11:00 PM CDT) through Saturday, April 20th (2:00 PM CDT), 2024, ni.com will undergo system upgrades that may result in temporary service interruption.
We appreciate your patience as we improve our online experience.
Contact Information
University:
Korea Aerospace University
Team Members (with year of graduation):
Dong-Guk Choi, Chan Hwang, So-Hae Na, Hyun-Jin Bae, Sang-Hun Shin
Email Address:
Submission Language:
English
Project Information
Title:
Ground Control System for SSC
Description:
This project is the Ground Control System(GCS) for Student Soaring Club(SSC) in Korea Aerospace University. It is available for any monitoring system, if required data are received in real time.
Products:
MCU(ATmega128)
GPS module
AHRS
RF module
NI LabVIEW
Google Maps API
The Challenge:
To flight of a glider, mainly parts are consisted of the glider, the tow car and the ground personnel. It is necessary to cooperate with each other. The glider has to communicate with the tow car and the ground personnel have to control over everything such as the glider, tow car and etc. The runway has been emptied for the glider landing. Because the glider has no power plant, the ground personnel can’t know when the landing. They keep eyes the glider. They are missed sometimes, because finding the glider in the sky is difficult. If they are have position data of the glider such as latitude, longitude and altitude, they can be looking for the glider easily and be expecting to the landing.
The Solution:
The information of the glider is getting a GPS module and AHRS module using MCU. The GPS module is acquiring latitude, longitude, altitude and speed. The AHRS module is measuring the angle of roll, pitch and yaw. In case of tow car, it has GPS module without AHRS. The acquired data is transmitted to Ground Computer by RF module.
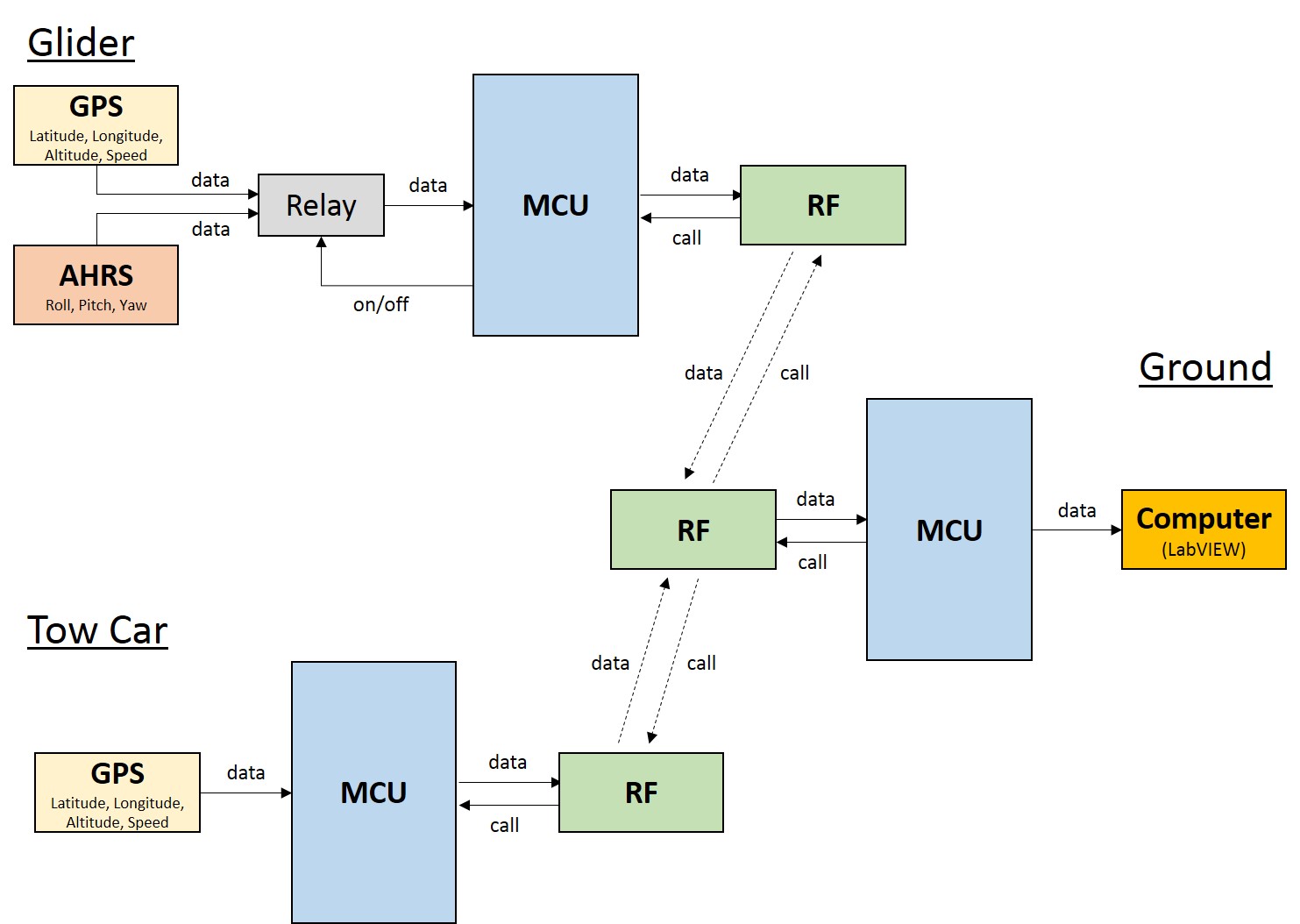
Figure 1. Schematic of the Ground Control System
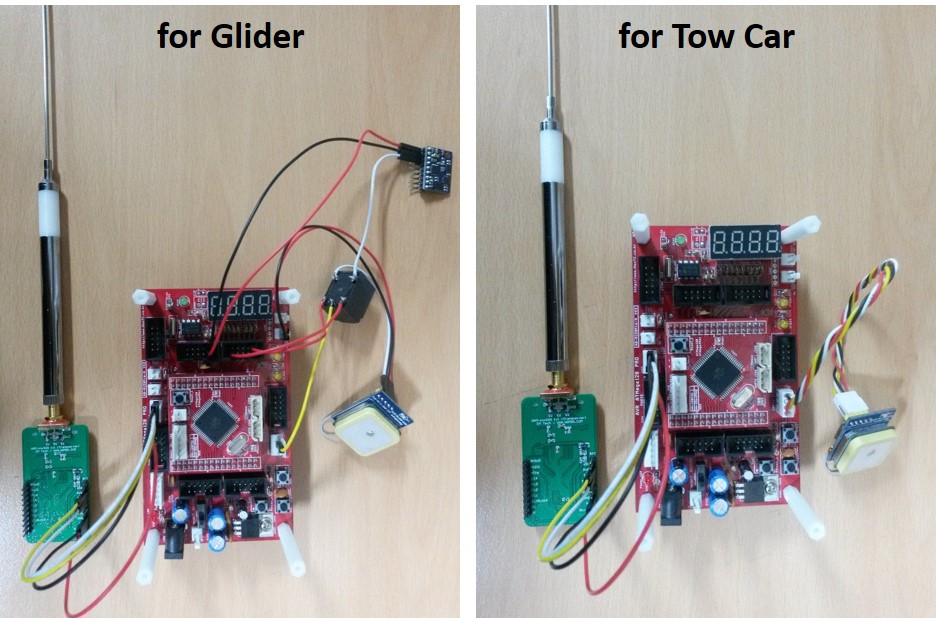
Figure 2. Basic Hardware Composition
The ground computer display the information of the glider and the tow car. The data is monitored at ground control system based on LabVIEW in real time. The position of the glider and the tow car are updated in the map using Google Maps API.
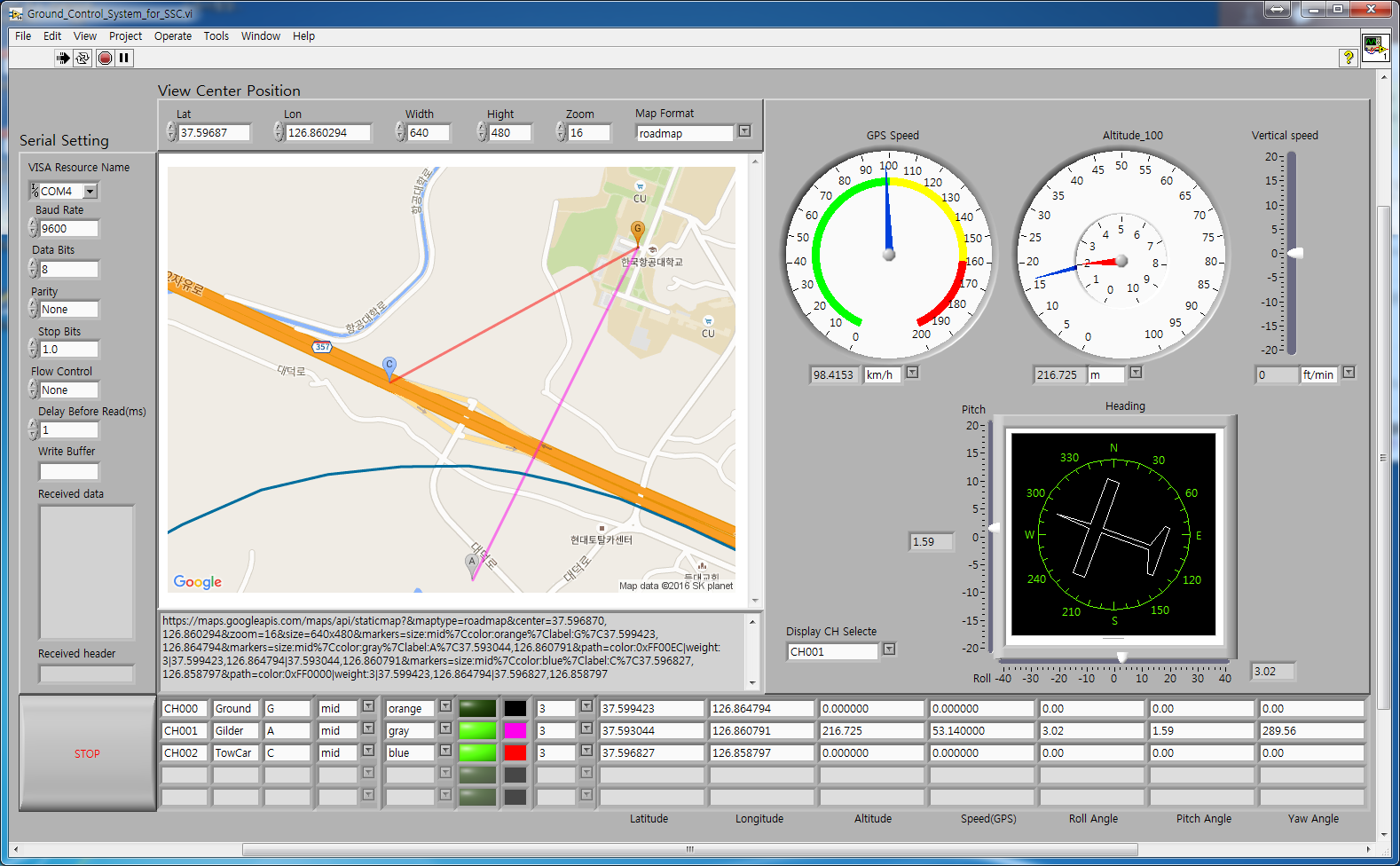
Figure 3. Ground Control System
Brilliant!
Brilliant!
amazing

