- Document History
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
WALL-E, University of Florida, USA
Contact Information
University: University of Florida
Team Member(s): Michelle Gilliard, Kyle Hale
Faculty Advisors: Dr. Eric Schwartz, Dr. Antonio Arroyo
Email Address: mlgilliard@ufl.edu, kph1516@ufl.edu
Country: USA
Project Information
Title: WALL-E
Description:
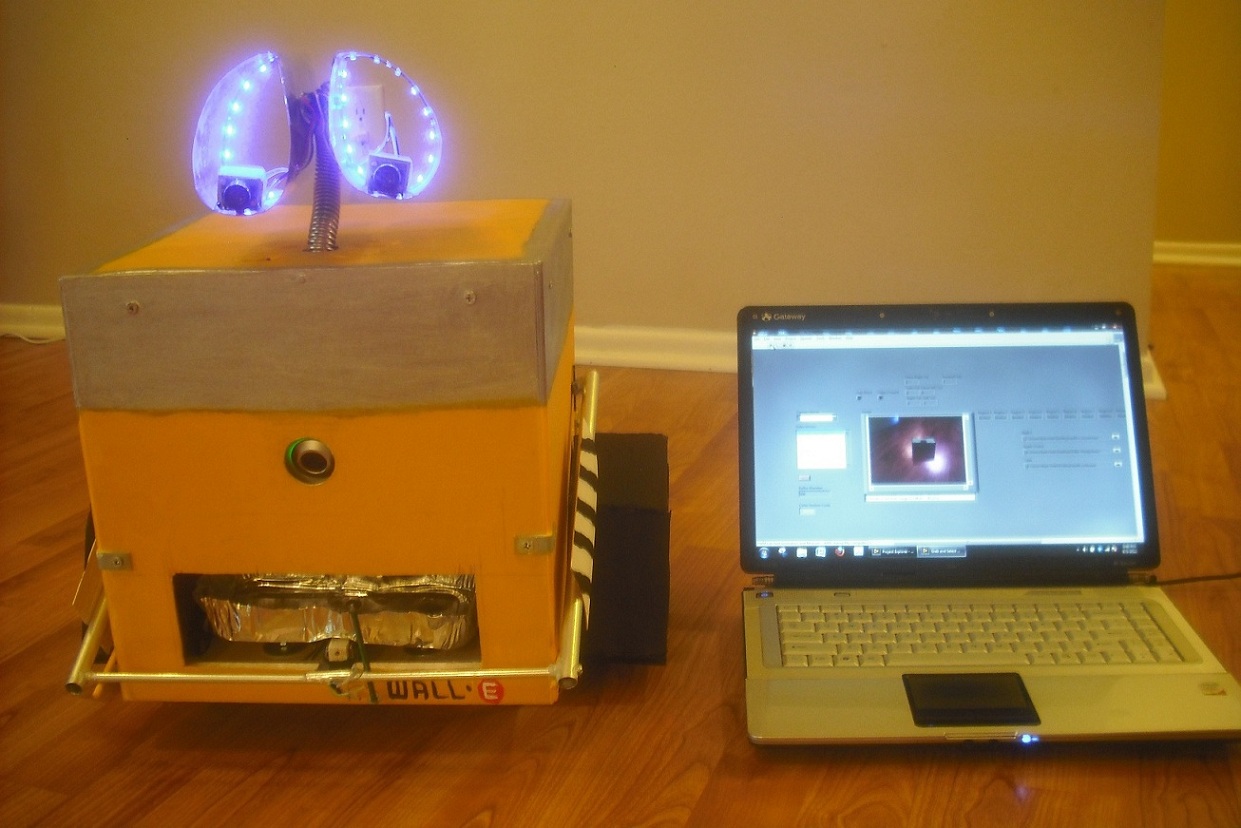
Wall-E is a robot modeled after a character in Disney's Wall-E. This version of Wall-E is capable of obstacle avoidance and color detection via an IP webcam. Once a piece of green trash is located, Wall-E will grab the trash with an electromagnet and place it in its tray.
Products:
SbRIO Evaluation Board
LabVIEW 2011
LabVIEW FPGA Toolkit
NI Vision Toolkit
The Challenge:
We wanted to create an autonomous robot similar to Disney's Wall-E that could locate and collect trash.
The Solution:
WALL-E is controlled by a Single Board RIO (sbRIO) evaluation board which is an FPGA with a real-time microcontroller donated to me by National Instruments. The evaluation version of the sbRIO is like a regular sbRIO except it had a pre-made breakout board attached to it that contains the following: quadrature encoder, switches, LEDs, push buttons, analog I/O, digital I/O, temperature sensor, and potentiometer. This breakout board helps to make prototyping even quicker but does not utilize all ports on the sbRIO. We used this board to test all aspect of the robot before attaching it to more permanent I/O of the sbRIO.
The robot has a square wooden body with a drop down door with a pull-out tray for trash collection. Its arms hang down on both sides, but, unlike Disney’s WALL-E, they are connected together at the bottom below the opening on the body’s door. This makes arm operation easier. The robot’s drive train consists of three components: two wheels for forward motion and a castor for rear support. There are fake all-terrain wheel covers on the side to make the robot appear to be more like WALL-E. There are a pair of “eyes” on top of the robot body which house the unit’s sonar and will swivel via a servo motor. There is a layer in the box body that houses the sbRIO while the camera is glued to the inside of the shell. A LabVIEW front panel is used to update spectators on the current function of WALL-E.
There are three types of actuators for WALL-E: servo motors, geared motors, and an electromagnet. Servo motors are used to swivel the sonar which broadens the area seen by the robot and control the arms. Geared motors are used to operate a rack and pinion which moves the trash tray that extends out of the robot body. Geared motors are also used to maneuver the robot. The electromagnet is used to attract and secure the trash. The electromagnet is constructed from a nail with magnetic wire wrapped around it and has the ability to reverse polarity to remove and attract the trash accordingly. We used a motor driver to give the electromagnet the ability to attract and repel the trash. This works because a motor driver has an H-bridge.
WALL-E uses a number of sensors to achieve its desired functionality. As stated earlier, an IP camera with color detection is utilized to locate trash. All image processing was done on a laptop using LabVIEW since we were able to prototype it during a downtime period when the sbRIO broke. Two sonar sensors are housed in the eyes and swivels around on servo motors. The sonar is only used to detect obstacles. A Hall Effect sensor is placed on the robotic arm to more precisely pin point if trash is present.
WALL-E will go through a series of movements to locate, grab, and dispose of the colored magnets it designates to be trash. First, WALL-E will drive forward using its IP camera and color detection to attempt to locate trash. At the same time it will be using its sonar to determine if an obstacle is present. If there is an obstacle is present, WALL-E will reverse and turn either right or left depending on where the obstacle is located. Once the colored trash is located, WALL-E will stop and say his name. He will then drive forward and further locate the magnetic trash with his Hall Effect sensor. If the trash is missed, he will back up and begin locating the trash again with his color detection and eventually try to locate it again with the Hall Effect sensor. Once located, the electromagnet will be activated and he will raise his arm. He will then open the door located on its body and reverse the polarity of the electromagnet to drop the trash into the drawer. Once this is accomplished, he will close the drawer, lower his arm, and begin surveying for more trash.
In summary, WALL-E used the above listed NI products along with the following electrical components:
- 2 Servo Motors
- 3 DC Motors
- 4 Motor Drivers
- 1 Electromagnet
- 2 Sonar Sensors
- 1 Hall Effect Sensor
- 1 IP Camera
- 1 Wireless Router
- LEDS
See the attached for the G code used to control WALL-E.
DON'T FORGET TO VOTE!!!
Applications Engineering
National Instruments
{kind=link}
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
Make sure you click the like button on the bottom right hand corner of my post to vote for WALL-E!
Applications Engineering
National Instruments
- Mark as Read
- Mark as New
- Bookmark
- Permalink
- Report to a Moderator
You guys did a great job! Best of luck
