- Document History
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
Localization, navigation and smoothing for solution paths to a labyrinth, Mexico
Contact Information
University: ITESM CCM
Team Member(s): Andrés Páez, Roberto Cárdenas
Faculty Advisors: Pedro Ponce
Email Address: paezand@gmail.com, robalecarova@gmail.com
Country: Mexico
Project Information
Title: Localization, navigation and smoothing for solution paths to a labyrinth, Mexico
Description:
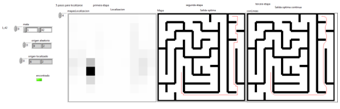
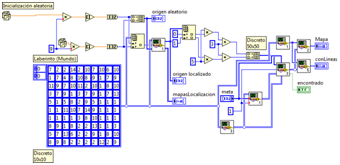
Using LabVIEW we have coded and simulated an algorithm using histogram filters and A* algorithms to locate and navigate smoothly through a maze. This was done with the objective of porting later on to a robot or even a car.
Products:
LabVIEW 2011 SP1
The Challenge:
Given a noisy enviroment and faulty sensors, the challenge is to locate and navigate a robot through a maze using the map of the maze and the wall sensor's input as fast as possible without touching the walls.
The Solution:
The project consists of three steps: the first is to locate the robot within the map, then to trace a route, optimize it and traverse it. This is done using histogram filters and A* and smoothing algorithms.
Using LabVIEW reduced greatly the developping time when coding the GUI. Given the fact that we needed to paint over a full bit map LabVIEW granted us the tools to do so. Another great thing is that because it was a big code, we had to do it modular so that we could work parallel. LabVIEWw is a great tool to program project modularly and to understand what the other one is programming.
http://www.youtube.com/watch?v=6Mil7DlZNsk&feature=youtu.be
Nominate Your Professor: (optional)
We would like to nominate our teacher Pedro Ponce because of his outstanding teaching methods. Not only did we learn LabVIEW, but we also got to develop around 4 big projects using LabVIEW during the semester. Because of this self-teaching didactic activities we learnt how to use LabVIEW together with PID controllers, Fuzzy-Logic controllers, neural networks, NXT projects, FPGA and real-time projects, NI DAQ projects and Compact RIO too. This is the reason because we want to nominate our teacher.
