- Document History
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
- Subscribe to RSS Feed
- Mark as New
- Mark as Read
- Bookmark
- Subscribe
- Printer Friendly Page
- Report to a Moderator
DEVELOPMENT OF LABVIEW BASED GESTURE DRIVEN ROBOTIC ARM
Contact Information
University: Anna University, Chennai.
Team Members ( graduation 2014):D.Alamelu Vidhya, R.Anitha Rajalakshmi, J.Brindha, R.Gitaanjali, A.Jovina Princy.
Faculty Advisers:
- Mr. Porkumaran(Principal, Dr. N.G.P. Institute of Technology)
- Mr. Suresh Kumar (HOD & Director Research,Dept. of ECE)
- Mrs.Ellamal(Associate Professor,Dept. of ECE)
Email Address: rardrngpit@gmail.com
Submission Language English
Project Information
Title:DEVELOPMENT OF LABVIEW BASED GESTURE DRIVEN ROBOTIC ARM
Description:
In few years ROBOTS are going to rule the universe. Especially in medical field, man power is reduced by replacing robots.
Products
HARDWRE TOOLS REQUIRED: | SOFTWARE TOOLS |
REQUIRED: | |
Zigbee | National Instruments LabVIEW 2011 (32 bit) |
ARM7 Microcontroller | Audacity 1.3 beta |
Wireless Camera | |
Driver IC ( ULN 2803 ) | |
Buffer | |
Alarm |
The Challenge
PROBLEM IDENTIFIED :
In the existing system, human hand movements is sensed by the robot through sensors and it imitates the same, but this is made possible by placing the sensor in the accelerometer and which is to be carried by the person(user’s hand).As the person moves his/her hand , the accelerometer also moves accordingly which in turn displaces the sensor and this sensor senses the parameter according to the position of hand and this sensed parameter are given to the sensors placed in robotic arm which makes the movements of robot arm accordingly.The drawback faced in this system is, accelerometer should be always carried by the person and also it cannot be applicable for longer distances.
The Solution
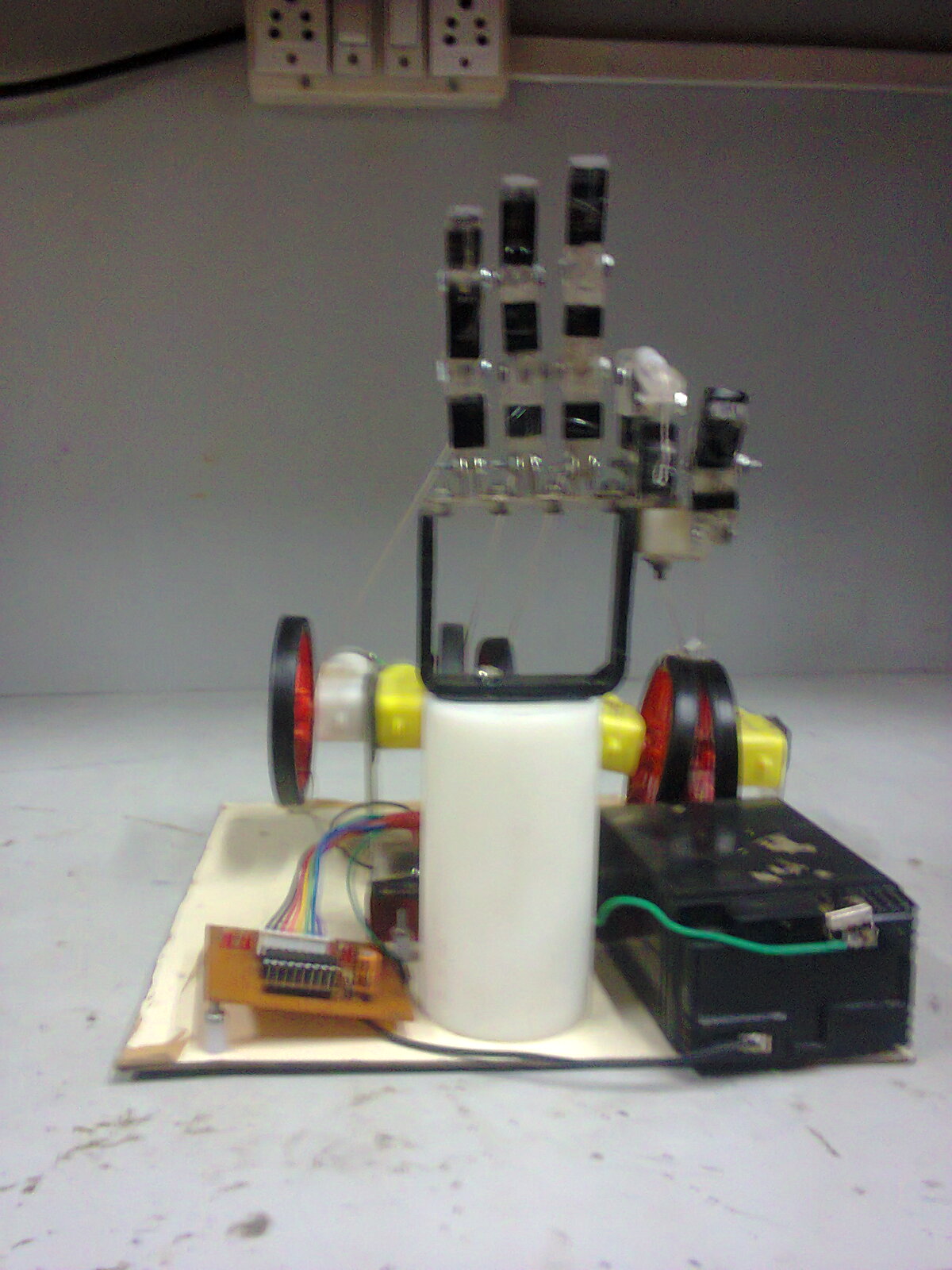
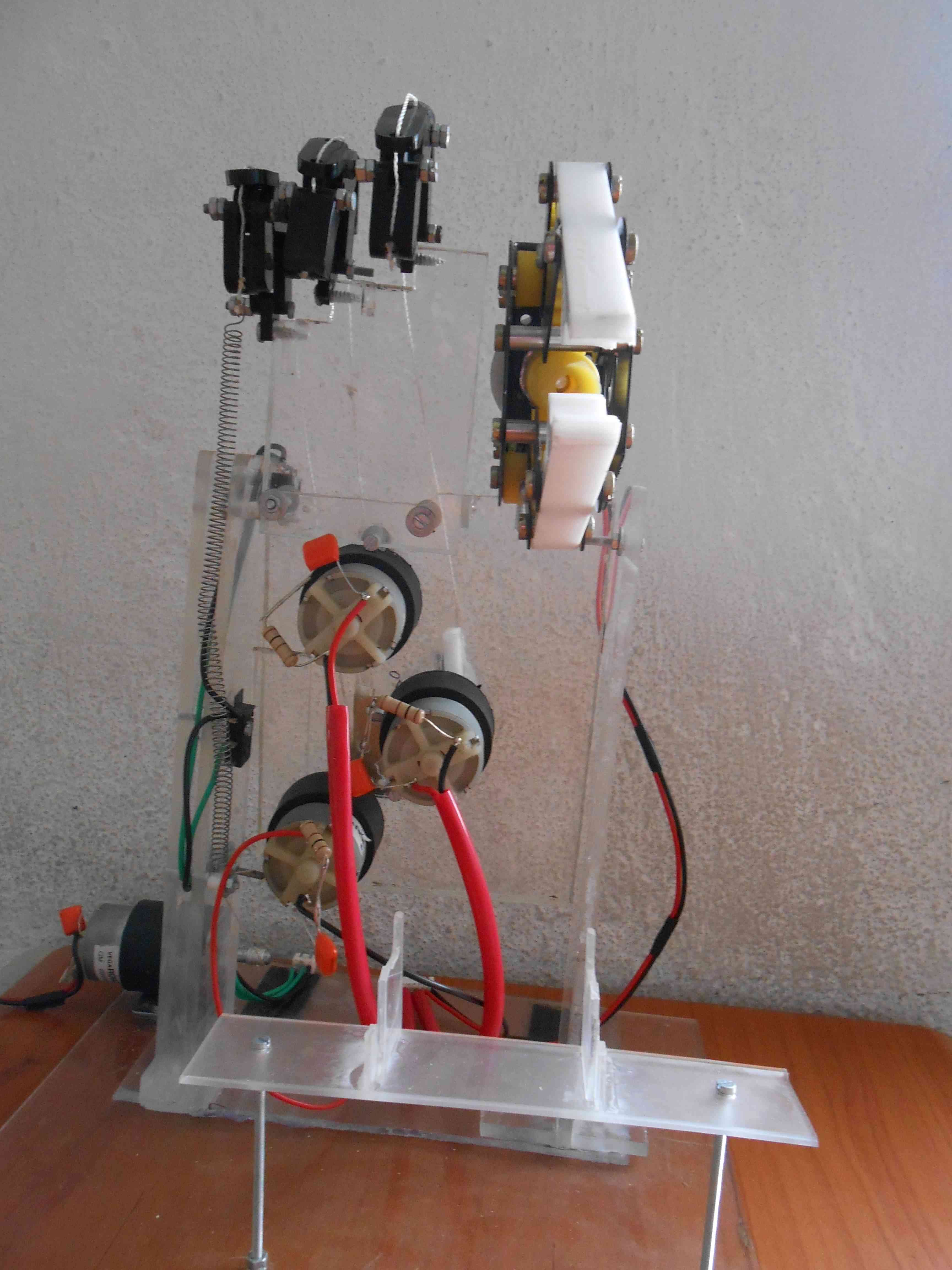
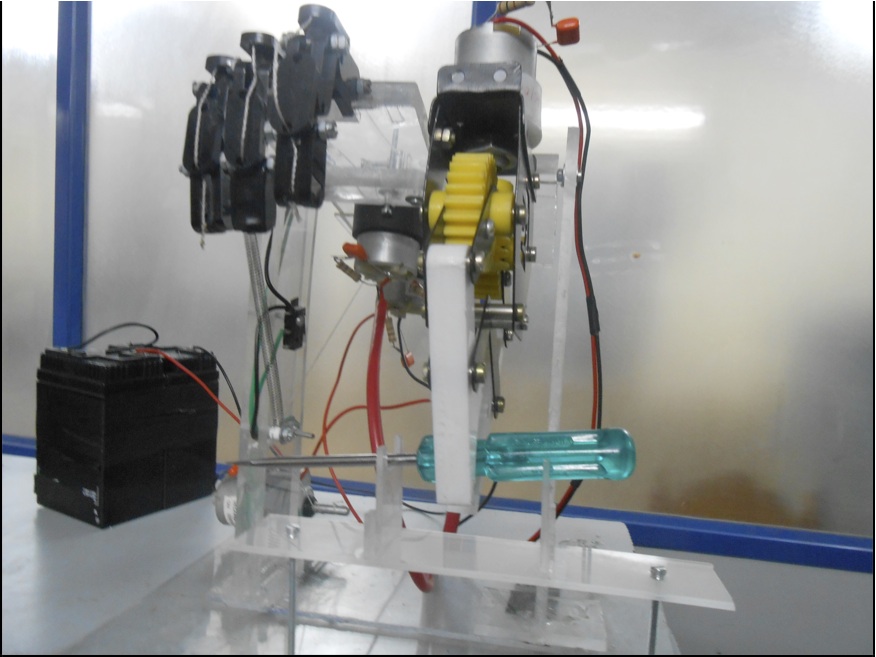
Inorder to overcome these drawbacks, we go in for this proposed system.In this system, a gesture driven robotic arm is developed, in which the arm movements and manipulations depends on the gesture of the user. In this system, gesture is captured by camera and it is processed by LABVIEW software and the parameters are sent to PC.It is then transmitted (transmitter section) by ZIGBEE transmitter. In the receiver section, the ZIGBEE receiver holds the received parameters and process with ARM7 microcontroller and gives those parameters to the robotic arm to make it act accordingly to the gesture. By this system,it is possible to achieve long distance processing. This system is purposely developed to apply in medical field for nursing assistance to physicians and in surgeries. And in the receiver section a wireless camera is placed to monitor the performance of robot arm and also in patient side(Robot arm side)5 vital parameters (ECG, Respiration rate, Pulse rate,Temperature, Heart beat) of patient is monitored. This is a preventive measure in case of any imbalance in victim’s metabolism(temperature,pressure,heart rate), ALARM in transmitter section(physician side) will be ringing , which inturn brings into notice of physician that patient is in some critical situation, so that the physician immediately stops the action of robotic arm and he will inform the nearby doctors to take care of patient. This robotic arm developed is to reduce man power in medical field, take care of patient in absence of specialist/surgeon and to impart the robotic in medical areas.
ADVANTAGES :
Distance between robotic arm and person’s gesture can be extended to greater than 20m(long distance).
Carrying of accelerometer is not needed.
Even in absence of specialist, operations can be performed.



Level of Completion : Alpha
This project can be furthered enhanced by improving the degree of freedom up to 360 degrees (move flexibly in all directions). The usage of material can also be enhanced by using Carbon Nano materials which can be replaced instead of acrylic/metal so that it can act as a resistant to Chemicals so that it can be implemented in chemically hazardous areas.
Further, artificial intelligence techniques can be investigated and implemented on the robotic arm for higher end applications. The project can be further extended with voice recording system to aid the physically challenged by using sign languages as input.
